大家好,我是 @微醺的工程狗,知乎家電博主,只用真實實驗推薦良心好物~
追覓和雲鯨這兩台掃拖一體機其實微醺很早就已經收到了,但它們作為互聯網新品牌做的一款全新新式的產品,除了常規的測試計畫外,還讓它們在我家實戰了很長時間,以便觀察看有沒有什麽隱藏Bug,確認無誤後,才能寫一篇負責任的評測~
利益聲明: 本文除追覓和雲鯨提供的測試樣機外,無任何恰飯,可放心服用。
一. 外觀

追覓的外觀繼承了米家的基因,整體白色為主,簡潔大方,外表面采用磨砂處理,質感很好,外觀設計甚合我意,在最近大火幾款帶基站的掃拖一體裏,這個外觀屬於第一梯隊的高顏值產品,與家居很好搭配。
雲鯨則比較圓潤一些,外表采用了光面外殼,塑膠感比較強。
顏值:追覓>雲鯨
二. 硬體配置
底盤配置

- 邊刷
追覓采用五腳邊刷,比傳統的三腳邊刷防擊飛效果更好。
雲鯨采用傳統的三腳邊刷。
邊刷配置:追覓>雲鯨
2. 主刷
追覓采用了浮動主刷采用毛刷+膠刷組合,地面貼合好,清潔能力強,但防頭發纏繞比較差,不過影響不大,就算纏繞了,也只是損失少量清潔能力,就算不清理也能正常工作。配合D形機身,可處理到更多邊角位置。
雲鯨沒有主刷... 只有一個吸風口... 且沒有浮動,地面貼合不佳,因此掃地能力是偏弱的... 而且掃地和拖地不能同時進行,必須更換模組... 模組在地上來回滾,通常是很臟的,換模組的體驗非常差,掃拖無法同時進行,是雲鯨最大的痛點。
掃地配置:追覓>>雲鯨
3. 拖布
追覓拖布采用了目前主流的旋轉拖布,設定在主刷後方,可以做到掃拖同步,前掃後拖。旋轉拖布在旋轉時與基站肋條摩擦實作自清潔,基站只需提供清水即可,減少活動部件,可降低故障率。拖布有浮動設計,內建下壓力,與地面貼合度好。但拖布位於D形機身的尾部圓形位置,拖布與邊緣距離較遠,邊角容易拖不到。
雲鯨拖布與追覓配置幾乎一樣,但拖布寬度幾乎與機身同寬,可縮小拖布與墻壁之間不可清潔的範圍,微醺非常期待它在後續實測中的表現。
拖布配置:雲鯨>追覓
4. 地毯辨識
追覓有超音波感應器,用於辨識地毯,可避免拖布打濕地毯,也可以對地毯進行加強吸塵處理。
雲鯨無此傳感器。
地毯感應配置:追覓>雲鯨
拖布烘幹形式
追覓的基站配置了熱風烘幹,可加快拖布烘幹速度,避免微生物滋生。
雲鯨是冷風吹幹,烘幹速度較慢。
烘幹配置:追覓>雲鯨
地圖和清潔規劃傳感器

兩者的地圖規劃采用了有LDS雷射雷達,特點是地圖掃描速度快,精度高。
但追覓的LDS雷達有壓力傳感器,可防止掃地機被一些高度較矮或復雜的家居卡住。

例如這種歐式家居,下部裙邊非常容易將掃地機器人的LDS雷達卡住,而有壓力感應的機器人在辨識到有碰撞擠壓後,會繞開這個區域。
規劃傳感器:追覓>雲鯨
避障傳感器

兩者的避障采用了機械避障和紅外避障傳感組合,對正前方,高度較高的障礙物可做到不碰撞繞行,但高度較低或者側面的障礙物則靠輕觸觸發機械避障後才繞行,不過有個小細節追覓做得更好,它在碰撞條上設定橡膠條減小碰撞感應時產生的撞擊力度和噪音,可以更好地保護家居,但這類傳感器配置無法對地面的小物件進行辨識,例如數據線小玩具一類的東西,還是會被推開。
避障傳感器配置:追覓>≈雲鯨
綜上所述,硬體配置方面,追覓W10大部份配置都優於雲鯨,特別是掃地部份可掃拖同時進行遠遠優於雲鯨的分離設計;雲鯨的主要優點在於拖布與機身同寬,可減少墻壁與拖布之間死角的距離。
三. 掃拖效能測試
家庭環境中,需要機器人處理的常見汙漬有粉塵類,顆粒類,紙屑類,毛發類,水漬類,油汙類,因此微醺給雲鯨和追覓準備了一份超豪華混合大禮包~ 來看看它們能不能應對家居環境中復雜的汙漬情況。
制備混合汙漬豪華大禮包
最後,為了考驗機器人對邊緣的清潔能力,將混合汙物布置在墻邊,於是就有了下面這幅景象~

大約50*50cm的無敵混合大雜燴~
追覓W10先來一局~
透過視訊記錄可以觀察到:
- 固體汙物很少被邊刷擊飛,邊刷可以很好的完成固體顆粒收集工作,但主刷下面有崩出黃豆,應是輪胎碾壓導致的。
- 被擊飛或帶出的汙物,在後續的清潔過程中被陸續回收。
- 對邊緣區域只進行了一次清潔,中央主體區域進行了橫豎交叉清潔,殘余口紅呈現邊緣部份多,中央區域少的分布。
- 除口紅外,即使是沾水後比較難清潔的頭發和紙屑,其余汙漬的清潔效果都很好,完整清潔後,視訊區域內只剩口紅還有明顯殘留。
清潔完成,來特寫鏡頭觀察一下戰果~
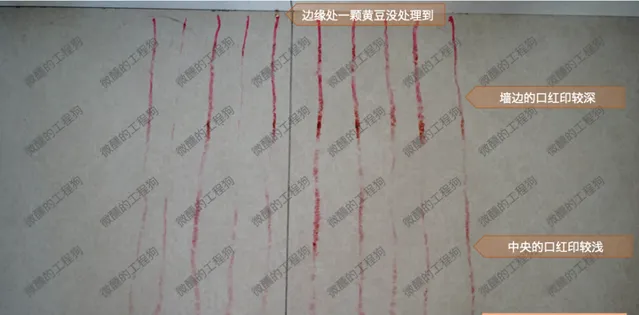
邊緣處殘留黃豆一顆,口紅殘留上粘有少量可可粉,無頭發和紙屑殘留,但在清潔區域以外,發現了頭發絲,紙屑,黃豆各一粒,如果是全域清潔的話,有較大機率將它們重新捕獲。

靠墻最邊緣區域特寫可以看到,拖布與墻有大約5cm的區域無法被拖布清潔到,因此有少量粘附的比較緊的可可粉殘留,與拖布用水清潔的區域形成鮮明的對比,這個成績不算非常滿意,但也不太意外。
換雲鯨J1上~
用廚房濕巾收拾掉殘余的口紅印,重新布置上同樣的大禮包,換雲鯨J1上~

這屬於是把汙漬塗抹均勻了這是... 雲鯨J1遇到這種混合汙漬幾乎無能為力,甚至幫倒忙,但家裏的汙漬不會只出現固體也不會只出現濕汙,總是有你也有我,無法處理混合汙漬是雲鯨J1最大的痛點,因此雲鯨必須與一台獨立掃地機器人配合才能較好的完成掃拖任務,否則就需要人工幹預進行一次模組更換。
正當我苦惱這殘局怎麽收拾時,突然靈機一動,想到正好可以給追覓再加一檔難度,看看這種塗散,摸勻,沾水的混合汙漬,它能不能對付~
好在經過追覓的處理後,大部份汙物被解決了,最後廚房濕巾解決掉殘余的口紅印和細塵,完美~ 領導回家絕對不發現我搞的破壞~
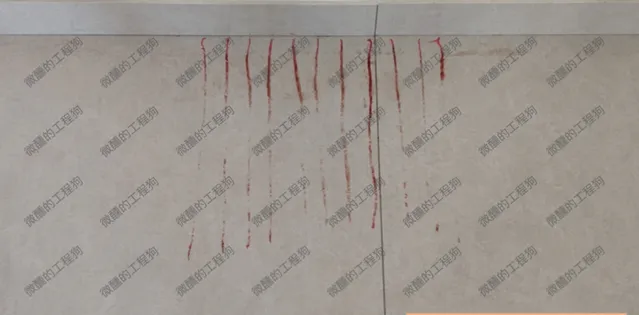
為了對比拖地能力,給雲鯨減小難度,取消所有固體汙漬,僅使用口紅測試拖地效果。

可以看到雲鯨J1對口紅的處理能力與追覓W10相當,但這裏微醺意識到有一個Bug,就是殘留的口紅多少與我下筆時的力度和角度的關系巨大,而我人工操作的力度是很難完全一致的,因此口紅測試法其實不夠嚴謹,以後的實驗要考慮一致性更高的方案。
由於口紅看不出來拖布與墻壁之間死區範圍,所以我給墻邊灑了點可可粉,再次啟動拖地。
視訊中可以看到,雲鯨掃過一次後,殘余可可粉的量依然較多,待兩次清潔完成後,測量未清潔到的可可粉寬度。

邊緣區域不太規則,未清潔區寬度大約在3cm左右,沒有清潔到的部份就是完全沒清潔到,大量可可粉原封不動地待在那裏,跟追覓清潔過後剩余的細塵不可同日而語... 說實話,微醺其實有一丟丟的失望,畢竟雲鯨的拖布幾乎與機身同寬,理論上可以把邊距縮得非常小,這是雲鯨拖地最吸引我的地方,因此我對它的成績期望其實是1cm的樣子... 實測數據3cm沒有達到我的期待,但也比追覓提高了2cm,看來各家在縮小邊距方面都還有很長的路要走。
超級混合大禮包的測試結果與透過配置推測的結果比較一致:追覓掃拖組合的清潔能力非常強,可一次性處理大量混合汙漬,掃拖同步相較於雲鯨優勢巨大;拖地清潔力兩者相當,但雲鯨墻壁邊緣的死角範圍比追覓小,優勢沒有預期的明顯。
從兩台機器的長期實際體驗來看,雲鯨必須再搭配一台掃地機器人才能比較好地完成清潔任務,先用掃地機掃一遍,再用雲鯨拖一遍,確實可以實作光腳自由,但耗費的時間非常長,雪上加霜的是智慧化程度不夠,雲鯨自家沒有掃地機,只能用別家的,如果是家裏沒有小寶寶的上班族還好,上午定時掃地,下午定時拖地,回家就有清爽的地面,但前提是,掃地機器人能正常工作,否則回家就會發現沒有掃到的區域四周都是被雲鯨推開的頭發碎屑一類的固體汙物... 如果是有小寶寶或老人經常在家的家庭,掃一遍再拖一遍的耗時實在太長了,很多時候只能退而求其次,只掃不拖,周末全家出遊啥的才能安排一次掃拖全套,但在外面玩時經常忘記點拖地,然後就是半個一個月不拖地... 光腳自由也就無從談起了...但保持基本的清潔是能做到的,因此,即使是有掃地機器人配合,雲鯨J1在易用性上還有很大的提升空間。一丟丟題外話:最近它的凈水箱還莫名其妙的自裂了... 不知是個例還是普遍現象...
追覓由於是真正的掃拖一體,掃拖可以同步進行,在米家APP設定好離家模式,老人出門遛娃時,一鍵全屋關燈掃地,然後就不用管了,回到家時就是幹凈清爽的模樣,更像是一個機器人該有的樣子。由於每天都進行一次掃拖,所以即使是清潔能力比較薄弱的墻邊區域其實也不臟,因為平時家雷根本就沒有測試時那麽嚴重的汙漬,可以更輕松地實作光腳自由。
綜上所述,掃拖綜合效能:追覓>雲鯨
四. 避障能力
越障高度

微醺手上有一塊1.8cm厚的木板,正好拿來測試它們的越障能力。
追覓W10可以輕松越過1.8cm的木板,而雲鯨則無法透過,對於有大量門檻石的家庭,更強的越障能力可以避免機器人被門檻石檔住。
小物件
有小孩的同誌們都懂的,家裏總是有大量小玩具,即使沒有小玩具,地面也容易掉落一些小物件,很容易被掃地機器人推走或吸進主刷卡住,因此對小物件的避讓能力,是考驗機器避障效能的一項重要指標。
沒有一絲絲意外,兩台機器都是采用的是一樣的避障方案,都直沖沖地把玩具推開了...
數據線
數據線可以說是掃地機頭號殺手了,吸進去必定卡住主刷... 於是試試唄~
試試就逝世,沒有一絲絲意外,雙雙夭折,均無法辨識地上的數據線。
家具
家具人人家裏都有,對家具有效避讓可減少碰撞,保護家具,降低噪音。
兩台機器都能對家具做出有效反應,在正面遭遇家具時,可以提前轉彎,但側面還是要依靠碰撞傳感器接觸後才能做出反應,主觀感受上,追覓的沿邊清潔和動作流暢度比雲鯨略好,撞擊強度較弱。
此外追覓還有LDS壓力傳感器和超音波地毯感應,這是雲鯨沒有的,因此避障能力方面,兩台機器在主要的家具避讓和小物件避讓方面效能相當,但追覓的細節做得更多,可應對的場景也略多一些,綜合來看追覓>≈雲鯨。
五. APP及其他小細節
讓雲鯨跟追覓比APP和智慧是欺負雲鯨了... 追覓的後台米家APP,全球最大的智慧家居平台,使用者最多,接入裝置最多,聯動功能豐富,不是雲鯨的APP能比的... 但追覓的APP依然有較大的改進空間,這裏就不講雲鯨了,給追覓提點改進建議:
- 裝上拖布後就不能單獨掃地裏,建議增加裝了拖布後可單獨掃地的選項。
- 全屋只能采取一種清潔模式,應該允許設定不同區域使用不同的模式,例如衛生間浴室濕漉漉的機率比較大,可以設定成只拖或者先拖後掃。
- 現在的程式對地毯采取的避讓方案,實際上我觀察下來,拖布的一點潮濕對地毯的影響不大,應允許使用者設定在有拖布的情況下也可以上地毯,同時啟動超強吸力對地毯進行清潔。
- 有一點追覓應該向雲鯨學習,就是可以設定不同的清潔計劃,哪個房間怎麽清潔,清潔多少次,都可以設定好並保存。這樣可以更好地滿足不同的清潔需求,例如周末出遊時,空余時間多,可使用一個超級大掃除計劃,執行多次強力清潔;平常短暫出門,就使用單次的超快程式,進行基本維護,省水省電省時間~
- 由於追覓整合了掃拖兩項功能,兩項功能都耗電,因此即使追覓的電池更大,但也經不住揮霍,特別是使用超強吸力模式,家裏戶型較大的話很容易掃一半就沒電了,建議後續繼續加強電池續航。
六. 總一個結
追覓W10在外觀設計,硬體配置(熱風烘幹,浮動主刷,橡膠保護條,LDS壓力感應,超音波感應等等),掃拖清潔能力,避障效能,APP和智慧上均優於雲鯨J1,特別是掃拖同步比雲鯨的分離設計更方便,可一次性處理家庭環境中各種常見汙漬。雲鯨唯一比追覓好的一點是拖布寬度與機身幾乎同寬,拖地時的清潔死角比追覓小,但透過實測發現,其死角範圍仍有3cm,只比追覓縮小了2cm,優勢不如預期的明顯。
購買建議
在這兩台機器人之間選擇的話,且你本來沒有掃地機器人,那麽無疑是追覓W10更好,沒有任何懸念,畢竟技術是在不斷進步的,追覓W10是時下新品,而雲鯨J1已是幾年前的老款,敗下陣來也情有可原。
如果你已經有一款旗艦級的掃地機器人(或者家居環境簡單)沒有卡住掃地機器人的煩惱,甚至還有自動集塵功能,現在只需要一台拖地機作為補充,且作息規律,家中長時間無人,可以設定定時清潔,並且對減小一丟丟清潔死角邊距比較在意的話,那麽雲鯨J1更適合你,不過現在這個時間點,J2已經出來了,雖然最大的痛點掃拖分離沒有解決,但可以配置上下水模組,也是解決了一個比較大的痛點,同時越障高度提高到了2cm,吸力提高到2500Pa,配備了熱風烘幹,價格卻沒有明顯提高,因此入手J2的價效比更高。
在這兩台機器之外的話,目前微醺最看好的是米家免洗掃拖機器人普通版,雖然是震動拖布,理論上單次清潔力度差一些,但價格便宜啊,2499元,還要什麽自由車,而且避障配置比追覓和米家Pro更好,能避開一些小物件,被困機率降低,更能穩定地完成每一天的工作,顯然比經常需要在角落裏解救的機器人更值得信賴啊~











