謝鄔老師邀請。
=補一句=============================================
搞集群編隊什麽的,不整個十架八架怎麽行……還十架八架rtk啊vicon啊的……沒有研發損耗扛著誰耗得起啊……
話說我們居然樓上樓下都認識…
===================================================
編隊飛行的多台空中機器人,可以理解為一台巨大的弱關聯的變形機器人來討論,就是一堆 單機 組成一個大的 單機 ,這個大的 單機 可以變形。
-part 1-----------------------------------------------------------------------------------------
敘述無人機的編隊,應該同載人飛機進行對比進行思考。載人飛機的人眼大閉環編隊飛行已經發展的爐火純青,具體可以參考各大電影軍事論壇飛行表演隊什麽的,尤其是戰鬥民族的「勇士」飛行表演隊,重型空優戰鬥機密集編隊做特級,每一次看到(視訊)都讓人熱血沸騰。

載人飛機編隊飛行時,通常采用的是長僚關系,主要的決定因素在於在有擾動的環境下,長機的飛行狀態,速度,攻角等,僚機的飛行狀態,飛行員的決策與飛行員人眼大閉環的反饋控制。也就是說通常狀態是,( 全天候 ),( 訓練有素的 )飛行員駕駛( 貴的不行的 ) 長 機按照預先( 用對講機 ) 約定好 的航線穩定飛行, 僚 機飛行員按照( 用對講機 ) 約定好 的相對位置,( 機智地 )操作飛機保持( 時變或是時不變同步 )飛行。
對比來看載人飛機的編隊對應無人機,或者說是空中機器人的編隊飛行的幾個points:
1.全天候: 有擾動的環境,這需要空中機器人編隊飛行的整個系統適應外界擾動,從徐徐的微風到熊孩子和大媽。這一條是衡量無人機編隊是否是玩具級的最重要指標,實驗室級條件下的swarm也是在實驗室環境下盡量降低環境擾動完成的。
2.訓練有素的: 出色的飛控,魯棒的演算法,與飛機機械平台有相當好的適應,選擇得當的參數,能夠有一定的適應擾動的能力;好的點鎮定、軌跡追蹤和跟蹤演算法,能夠比較快和穩定的改變狀態,尤其是在位置環上。
3.貴的不行的: 飛行平台有良好的機械結構、氣動設計,靠譜的動力系統,有按照飛控要求改變狀態的機械能力,對於固定翼來說通常表示與飛控相適應的靜穩定欲度,對於旋翼來說就是高效率的控制能力。
4.長僚機: 飛行邏輯,飛行邏輯是編隊這件事的重要部份之一;
5.用對講機: 機器人間互動,這也是衡量無人機編隊是否是玩具級的最重要指標,沒有互動的編隊。。。(實在不知道怎麽形容)
6.約定好: 實際的編隊總是要裝訂一個任務的,相當於是到達某個地方,載入一條航線,追蹤一個物體這樣的任務規劃。沒有任務裝訂就編隊完全是為了編隊而編隊了(旁邊小夥伴說為了編隊而編隊也相當於是給編隊的機器人裝訂了一個任務,給跪了)。
7.機智地: 這一條相對於空中機器人,主要是在於相互追蹤時的壁障,對外界障礙的躲避,以及對於不同的,攜帶不同傳感器的空中機器人的即時編隊,涉及到相互傳感和預測等。
8.時變或是時不變同步: 寫著寫著混起來了。。。其實就是根據裝訂的任務和實際的環境線上的調整編隊隊形,實作時變編隊。
ps:小夥伴說這樣就是在胡扯,讓搞點有意思的。。
-part 2-----------------------------------------------------------------------------------------
來幾個編隊空中機器人的圖。。。審美炸不喜勿噴。。。
湖北易瓦特,2333,飛出SZ也是要水平的。
深圳打造「無人機之都」110余家企業傾力助陣--深圳頻道--人民網
MIT避障那飛機。MIT新型無人機可高速自主避障
完成方式:前一架自動,後一架人控,特例拉出來說說

ETH的。TED運動捕捉技術與無人機vicon大法,精心設計的控制演算法

ps 1:首先需要移除第一個圖片那個,一人控一台的集群只要飛行平台。。。
ps 2:移除一個發射機對頻到很多接收機一人控多個的情況。。。
閉環空中機器人編隊飛行的問題說到底就是移動機器人的問題。
核心就是 定位!定位!定位!
因為編隊只是一個行為,編隊這個行為和背後的任務耦合之後又會產生很多矛盾需要權衡。
在機器人Hierarchial architecture中,主要屬於執行級和協調級。
分解到機器人的關鍵問題,就是這幾個:location,planning,tracking,dispatch。
在移動上,分成點鎮定編隊,路徑跟蹤編隊和軌跡跟蹤編隊。
自主的全分布空中機器人編隊飛行的問題實踐起來就是:
地面站(無差別)向空中機器人裝訂(相同)任務,機器人接收任務,生成(靜態或動態)群總體移動軌跡,無序(同質或異質)空中機器人開始建立互動通訊,開始自主編隊,編隊飛行,群避障,地面站監測狀態。
完成下面這幾個條件才能算是一套完整的空中機器人編隊:機器人異質;地面站向每一台機器人裝訂任務時發送的訊息是相同的;機器人之間進行互動通訊;控制層面同質化,弱化主僚機拓撲,機器人之間的異質關系在傳感層面和規劃層面表現;飛行過程中地面站不參與控制。
-part 3----------------------------------------------------------------------------------------
首先需要一個有SDK的無人機平台,這個現在主流一點有代表性的就三波咯,
dji,asctec和3DR,對應的產品主要是 Matrice 100,Pelican,當然還有parrot的ARdrone什麽的,不過parrot現在社群比較冷清了。
dji Matrice 100

asctec Pelican

在平台的基礎上,再來說閉環空中機器人編隊飛行的問題:location,planning,tracking。
location ,
定位問題是現在規模化編隊集群無法走出實驗室的攔路虎,按照實際的導航與制導分成絕對定位與相對定位兩個問題。
考慮到成本,目前小型的空中機器人傳感器主流是慣導+GPS+VO,主要滿足的是定位懸停平穩飛行等一系列單機問題,再輔以一些避障等功能。在單點GPS絕對定位有較大誤差的情況下,不同機器人測得的GPS絕對位置是有較大誤差的,但是相對位置基本準確,拿來做屌絲差分GPS還是可以。互動中不同機器人建立表達群移動軌跡的絕對座標系就是不同的。如果分成內環和外環來考慮,以單機控制做為群內環,多機之間的相對位置就作為外環。
以同質機器人中的某一台測得的絕對座標建立絕對座標系,解算群質心的移動軌跡,之後用相對位置來訂正各個機器人的絕對座標系。
相對定位是保持同步編隊的核心問題之一。當然粗略的相對定位可以用單點GPS粗略的絕對定位來解算,但這樣的話編隊密度會大大下降,甚至降到10m級別。其他的相對定位方法。。。
#RTK,
即即時差分GPS,這是透過高精度的GPS得到高精度的絕對定位資訊,用這個高精度的絕對定位資訊來反結算相對定位資訊。缺點就是貴。。。而且優秀的RTK接收天線會大一圈,搜星慢一點,重新整理慢一點,但是就是貴。。。這東西需要一個地面站架設天線,然後高精的定位是以這個地面站為相對的。如果用RTK方案,軟體成本較低,就是硬體貴。。。五十架編隊就要50個rtk板卡。小一百萬。。。

#視覺,
這是硬體成本相對較低的解決方案,主要壓力就是軟體開發需要做很多工作。視覺方案核心就是視覺測距,編隊問題需要動態的以一定頻率重新整理一個視野內的位置點雲,測量機器人相對位置,去除視野內其他東西的幹擾。並且由於機器人編隊室內外環境下完成套用,主動光測量的結構光掃描和tof是比較有效的方案,被動測量的雙目是比較有效的方案。
雙目點雲,需要使用向四周的環視相機,可以做到一定範圍內的相對位置測量。比如dji的guidance那樣的裝置,使用這個裝置的話保持閉環縱橫方形編隊是比較容易做到的。

我個人比較喜歡的就是單目slam那一個體系,單目EKF-slam,還有msckf之類的vo方案都挺不錯,這類東西才是能夠投入實用的。我會嘗試將單目視覺套用到機器人個體相對位置的測量中來,那對於編隊活動來說是有一定意義的。
#動作捕捉,
這東西算是多目視覺定位的高級版本,精度高一些,通常采用主動紅外光。在一定的範圍內可以到公釐級的精度,有些實驗室常常拿來做真值用。局限是只能室內和室外小範圍用,缺點就是貴。主流的兩個廠商是VICON和optitrack,前者一套百萬,後者便宜(一些)差不多三幾十萬。(啊原來差點就用vicon的。。。)
這人一直在用optitrack,可以讓他來說說,是吧
@wqfe。
在拎水桶大賽的時候看過西工大用的一款室外動補,十米長基線的雙目,引導固定翼飛行效果也是不錯。
(照片找不著了)
#marker,
用marker來定位是一種非常好的近距解離決方案,也算是視覺定位,這裏面套用的比較好的就是parrot的表演,
Parrot無人機的空中舞蹈。透過地面上貼的markers,可以做定位和姿態測量。這東西的完成是這裏面最沒有難度的部份,實習生級別,而且在自動降落等等問題上有很優秀的效果,各學校和機構什麽的都在用。推薦個aruco,好用的不行。
#狀態估計,
這是任何一個機器人都需要的,但是在編隊情況中比較特殊。對於每一個機器人個體,其需要一套濾波器估計自己的狀態,包括位置速度加速度和姿態。第一,但在自主的全分布編隊中,由於沒有主從機關系,沒有集中控制,個體機器人只能透過互動通訊中獲取的周邊機器人的狀態(位置,速度,加速度和姿態)與任務規劃得到的群軌跡進行閉環,生成自己的控制量,在這裏就需要一套最優估計的濾波器來估計周圍機器人和群體質心的狀態,然後透過這個狀態來進行控制。第二就是多個機器人之間必然存在的通訊延遲,而且在對等通訊下興許收到的每台機器人的通訊延遲還不同,在這個情況下做好狀態估計也是工程上比較麻煩的事情。
對於旋翼類機器人,還有包括編隊過程中磁羅盤幹擾,加速度計和陀螺的誤差等的修正。
難道是一個EKF估計自己,然後一堆EKF估計別的每個人???在編隊問題上這是一個有很大余地的部份。
communication ,
通訊這個怎麽能拿出來當問題呢?看編隊的水平。
普通的易瓦特級別的編隊不存在這個問題,虛擬遙控的編隊也不存在這個問題,開環編隊也不涉及這個問題。在自主的全分布編隊中,尤其是時變編隊,這個問題就暴露出來。level 1,同等優先級的機器人在時變編隊中,需要保持低延遲的機間通訊,對於單個個體而言存在其收發到的訊息時間戳對準的問題,尤其是收到周圍同優先級個體之間的延遲依此增大的msg;level 2,同等優先級機器人數量小的時候用廣播的方式做訊息釋出,容易實作,在大量編隊的時候碎形到編隊下的多級編隊,以及編隊合並和編隊分離,不同編隊(航線)混編等情況,涉及到一系列變拓撲結構通訊的邏輯問題,這是在通訊底層下的planning問題,就有點事兒了。
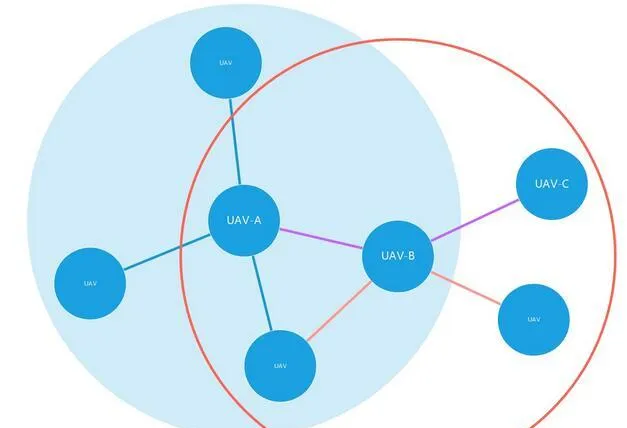
所以通訊這塊需要重寫一套具有優先級加密可分級別監管,具有分層能力,具有自適應拓撲能力,具有自診斷能力的全新協定,透過數個不同級別的通道,在自動空中機器人中嵌入 互監督 和 互避讓 ,這是未來大量民用自動空中機器人在頭上嗚嗚飛來飛去要解決的一個問題。不然想想順豐的飛機撞了亞馬遜的飛機,我就能百得兩個別人的快遞。。。。
簡單混合拓撲通訊邏輯的示意圖,哈哈哈將就著看看,圖片來自某次FOS討論,FOS中上面那套通訊的部份由
@吳易易在設計。
sensing ,
避障,避天避地避人避房子,沒別的。避動態障,就是編隊的時候旁邊飛過來的自己隊的機器人,編隊交叉的時候另一隊的機器人,還有飛來飛去的鴿子;避靜態障,就是避房子避樹。這是一個三維動態的避障,而且多機器人互相幹擾還不能用有源傳感。
避障升維額,雷射雷達不好用了;超音波公釐波互相幹擾不好用了;tof結構光不好用了。。。FOS裏面視覺小夥伴(就是我)滿滿的惡意。。。
這圖描述群壁障的一種情況,最粗糙的情況。
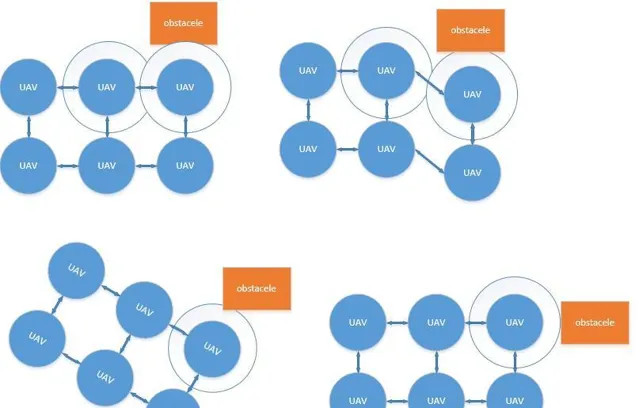
舉個特例,有個特殊情況就是障出現在編隊正前方,編隊分開左右繞還是一起繞?就是和基友手牽手迎面走來一個人,你倆分開左右走還是一起繞?這是個有意思的問題。
planning ,
這裏是和任務相關的東西,第一個問題就是為啥要編隊?
按照裝訂的任務生成一個群質心航線,是完成編隊之後再飛群質心航線,還是在飛群質心航線中完成編隊?動態的根據環境狀態,避障和不同機器人的個體差異生成個體航線,個體訂正航線會對群質心航線帶來什麽影響?如果其中一架掛了該如何處理?如果其中一架傳感器出故障該如何處理?如果其中一架被人手控接管,該如何處理?
這地方是有很多邏輯關系需要理清楚的。我讀了很多文獻,但是都沒有很好的把這些問題討論出一個結果。
其實就是把一個單機避障的問題打散了變成一堆飛機的動態問題,讓一堆表現得像是單機。然而其中包含的邏輯問題,是很難處理的。
自主的全分布空中機器人計算的群質心航線應該一樣,然後在互動中修訂自己的個體航線,尤其是在編隊的那一堆機器人攜帶的任務載荷都不一樣的時候。
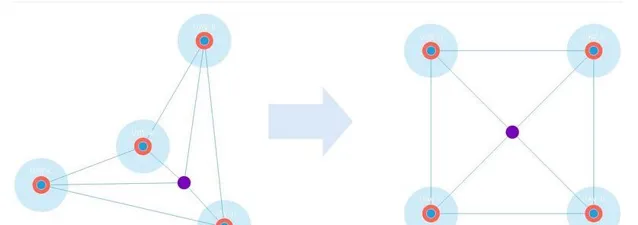
時變編隊中,群姿態的變化在以群質心的座標原點的群座標系下完成,然而每一台機器人的移動會改變群質心,進而改變群座標系,這個也是FOS關註的問題。
tracking ,
這是個移動問題,就是最快的完成對於生成的航線的追蹤咯。編隊問題的重點不應該放在這裏,因為這就是單機問題該考慮的。
分成點鎮定編隊,路徑跟蹤編隊,軌跡跟蹤編隊寫三套控制的東西:
懸停的點鎮定編隊,沒有編隊群質心航線,只用考慮編隊個體航線的軌跡追蹤,和群姿態的調整;
路徑跟蹤編隊,路徑是靜態的;
軌跡跟蹤編隊,軌跡是動態的。
啊,推薦一個基礎論文,L1路徑追蹤的
##展望##
貼一個我很喜歡的東西,DJI的phantom X,
來自未來的無人機——大疆精靈Phantom X。
共勉
基本寫完。。。