目前,中國的掃地機品牌已經稱霸了全球
我做過調研,雖然我們能看到國內使用者對掃地機產品的負面反饋頗多,但是國外使用者對國外品牌掃地機的吐槽點只多不少。
大家好,我是 @森山,作為家電博主,這幾年我發現自己的路子越走越窄,按理說自己做過20年的電子產品開發,也做過產品經理,對大部份電器電子類別的產品理解和分析會相對容易,但那麽多的家電品類,我偏偏最喜歡研究掃地機,而且越是去學習研究測試它,越覺得自己像門外漢,進入了一個新世界,不懂的東西太多太多,所以我策略性的減少了其他家電品類的學習時間,大部份精力又投入到掃地機這個領域裏。
掃地機從研發角度來看,是一個技術合集的全家桶,宛如這個時代的工業結晶,就像中古時代的手表、收音機、電子底片相機、Walkman等,它們在當年也經歷了輝煌,匯集了當時民用領域的高精尖技術,又體現了高整合度的精密工藝,同時它也具備從高價、高門檻到慢慢普惠大眾成為消費電子的特征。

從大的來說,掃地機涉及到電子、光學、化學、力學、聲學、電腦、材料等學科中的套用技術。
往小了說,各種傳感技術如雷射雷達、導航定位、懸崖和障礙物避讓,自動控制技術如溫度控制、走位控制、速度和真空吸力控制,語音辨識與互動,然後特別核心的視覺分析、軟體演算法等等,如果深挖的話,還有很多。
掃地機起源於國外,早期產品化代表為2001年 伊萊克斯推出的「三葉蟲」掃地機 ,而「掃地機」這個名詞,並不是國外的詞直譯過來的,國外現在依然叫「Vacuum Robot」,意為真空機器人,實際上這是吸塵器(Vacuum cleaner)的地面機器人形態。
在2000年初的時候,國內有一家在江蘇的吸塵器廠(泰怡凱),開始組建團隊研發掃地機,這個公司就是現在的科沃斯,從行業發展的角度,科沃斯確實是國內最早、而且是比其他家早了10多年投入掃地機領域的開山鼻祖和黃埔軍校,在近五年國內掃地機格局形成之前,科沃斯已經貢獻了非常多的產品,其中就包括2013年,國內首款搭載LDS雷射雷達的地寶9系掃地機,掃地機上凸出一塊的雷達,一直被沿用至今,套用在大部份掃地機上:
那些年,也只有科沃斯能和外國品牌抗衡。
按照我自己的從業經驗,2008年~2018這十年,是國內消費電子套用創新井噴的十年,2016年,新一代的創新科技品牌「雲鯨(Narwal)」成立,有一個懂技術又懂產品的老板,雲鯨帶來了能拖地的掃地機,重新定義了這個品類,實際上從那時候起,就不應該叫掃地機了,後續雲鯨為了解決拖地帶來的諸多問題,又做了很多第一次的創新,從現在看,也普及到了整個行業。

我認為,科沃斯和雲鯨這2個品牌,在掃地機行業歷史中,是具有裏程碑意義的品牌。
說回開頭的論點: 目前,中國的掃地機品牌已經稱霸了全球。
為什麽這麽說?
1、一些國外的大牌掃地機已經全面結束中國市場,有的甚至已經消失,如昔日巨頭Neato被Vorwerk收購5年後已經關門歇業,Dyson、三星等在掃地機領域一直沒有開啟,Irobot雖然還有銷量,但也是被國外使用者賣得最慘的品牌。
2、中國掃地機品牌全面出海:四大品牌主打中高端,子品牌、OEM廠家主打低端,全面開花,還有像Anker創新旗下的Eufy也在國外擁有大量使用者。
3、從銷量、技術、功能效能配置看,都處於領先地位。
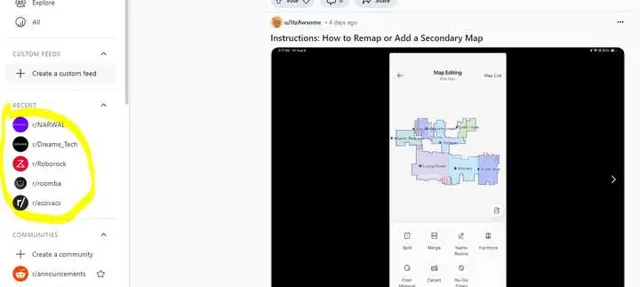
作為一個證明,我們能看到國外的頂級社交新聞站點上,都有ecovacs、dreame、narval、roborock的專屬論壇,且熱度比國內還高!當然售價也比國內高不少,狠狠的收割一下西方使用者!
甚至在幾天前,我看到一個國外使用者,在自己做的選擇攻略中,列出的他認為的2024年最好的5款掃地機型號,都是中國品牌:

此外,我個人主要關心技術方面,國外的三星、irobot、dyson等都略有研究,差距還是蠻明顯的。
機器人套用中的傳感技術、機電控制技術,國產品牌都出現了很強的個人化技術。
掃地機上的很多新技術,都是國內品牌推出的,如前面說的LDS導航、拖地功能、自清潔基站,到近2年的機械臂拖布、可升降邊刷等等。
但我覺得最重要的是傳感器的套用。
傳感器是機器人的眼睛、嘴巴、鼻子、耳朵,它的采集效能越強,機器人的自主工作能力就越精準。
今年2024年,是掃地機行業從二維傳感轉換到三維傳感的重要時刻。
二維傳感、三維傳感的說法,是我自說自話,大概就是這麽個意思,具體可以看我1年多前寫過的文章:
其中,有兩款最具典型代表意義的產品。
第一款,石頭V20,它采用了真正3D-ToF的面陣雷射模組
它最大的意義在於機器頂部沒有雷達了,一馬平川,大快人心,且導航定位避障效能不下降。
雷達沒有了以後高度降低至82mm,是主流掃地機的最低高度,進出低矮空間更容易,此外,沒有了機械式雷射雷達,後期故障率會降低。

來看看它工作時射出的光束:

這是一種非標的,很有巧思的光電方案,它會分分時策略的檢測:麻點狀的點陣光,強度高距離遠,是用於建圖和導航定位;均勻發散的面光源,強度弱距離近,用於避障。
所以它的前光學模組是非常復雜的:

其中Spot光源(點陣光源)的有效距離0.1公尺~10公尺,前後雙模組的單次采樣直徑接近20公尺,主打建圖導航;Flood光源(面陣光源)的有效距離為0.05公尺~1.5公尺,也符合避障的近距離需求。
RGB普通網路攝影機+Spot融合采集時,還能建立物體的三維資訊,更好的判斷家居環境:

我在3年前做過RGBD相機的開發,小小一個模組,幾十個人的開發團隊,對光學、硬體、軟體、演算法都有很高的要求,還得考慮功耗、散熱、幀率分辨率等細節,它這個確實難度極高,石頭的產品經理曾告訴我,為了這個方案,他們準備了4年。
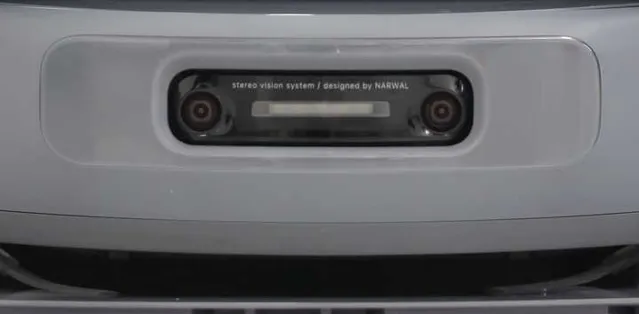
第二款,雲鯨逍遙001,它采用的是雙目視覺方案
最大的意義在於,行業多年對線纜無法準確檢測避開的頑疾被攻克了。
以前,做測評的時候,看到很多測評博主的無奈之舉,因為真的無法準確檢測到細線,就只能用這種擦邊球的測試方法,把線揉成團,來降低辨識難度,提高避障率:
而現在雲鯨逍遙001可以這樣測:
對使用者來說,使用掃地機的時候顧慮就少了很多。
雙目方案的原理,和人的雙眼類似:
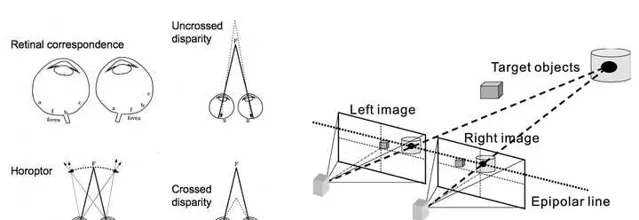
我們可以輪流開合一只眼睛盯著近處的物體去做一個小實驗,大家一定會發現,兩只眼睛單獨看同一個物體時,畫面是有偏差的,偏差的大小和「深度」有關系,這個深度通俗的講就是眼睛到物體的距離,同樣大小的物體,距離越遠,偏差越小,距離越小,偏差越大。
因此這個方法在掃地機中可以用來判斷障礙物的距離。
在很多行業雙目視覺方案都有套用,如我曾經研發過的三維掃描器等,只不過在掃地機行業裏還比較少見,之所以大家都不用,有以下原因:
這些技術是短期內難以復制的技術
舉的兩個例子,都是要長時間去整機調校的,並非簡單抄襲仿制就能套用,所以這兩個技術在國內是領先的,而國內品牌又是國際領先,所以我對比了國外的掃地機後,很確定的得到這個結論。
對於掃地機未來趨勢的一些看法、期待、預判
拋開以上提到的兩個技術案例,我也想對掃地機行業的現狀做一些梳理。
1、行業內卷很厲害,如果做張表出來,百分之八十以上的配置、參數都是雷同的。
2、參數的競爭,已經進入一種不科學的程度,如吸力數據像房價一樣一直飆升。
3、大部份創新點,仿效的很快,似乎沒有什麽專利保護,和供應商也有關系(誰的生意都想做),客製件慢慢變成了標準件。
4、多模態AI的融入、結合,其中
真正的3D地圖將會區別於現有的虛擬3D地圖
,透過雲+端的AI視覺SLAM,對於復雜地面的汙漬狀況可實作辨識,機器人有了對場景、汙垢的更全面更精準的認知,對於下一步完全脫離主人的操控提供了執行決策,掃地機將更有獨立思維。
5、掃地機這兩三年,顛覆性的改變有,但很少,
形態也許該變一變
了,比如戴森的360 VisNav雖然不懂中國使用者的生活習慣,但是它的結構設計我覺得更合理:

希望使用者給掃地機產品和制造商更多包容
掃地機區別於其他家電的一個很大的特征:
其他電器買回去相對固定,用法也單一,只要不壞就問題不大。
掃地機是真正意義上的機器人產品,它是會運動的,碰到桌腿是槽點、扯到一根線是槽點、汙漬太頑固一次沒拖幹凈是槽點,傳感器臟了沒擦拭不按正常軌跡移動也是槽點,還涉及到臟水臟汙,處理不當會漏水發臭等隱患,掃地機受限於環境的千變萬化、垃圾的千變萬化、主人習慣習性的千變萬化,吐槽點會非常非常多。
有時候我們這種掃地機博主,也成為了掃地機的公益售後服務人員。
這就導致,掃地機產品能看到的負面資訊要遠遠大於其他電器。
但實際我使用測試這麽多產品下來,只要稍加註意,使用起來都沒有太多障礙;並且小機率發生的一些小問題普通人也完全可以自行解決。
所以,中國的使用者是幸福的,我們用相對低的價格,用著全球最先進的家務機器人。
文末放一些自己以往的建議文章:











