------補充國內部份---------
國內我所知的有
-
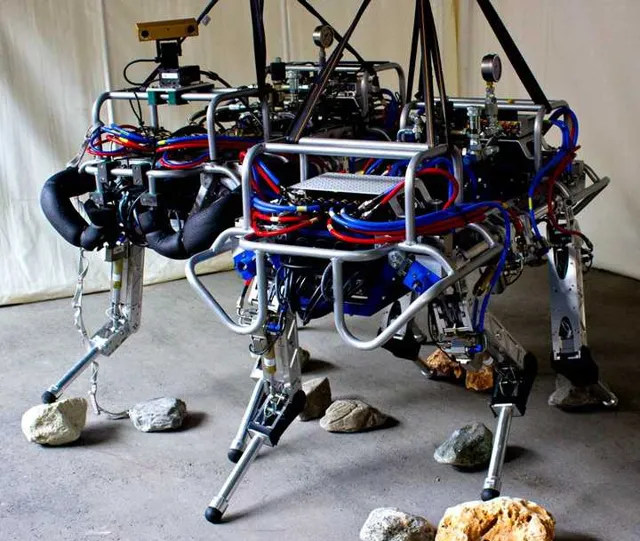
山東大學做的大狗機器人, 同boston dynamics的一樣使用hydraulics actuator.從他們的論文來看主要實作了蹦跳,不知道是否可以跑動 [1].
- 上海交通大學做出的大象機器人[2] https://www. youtube.com/watch? v=Iioy1e_pJUI#t=10 ,可以負重100公斤.
-
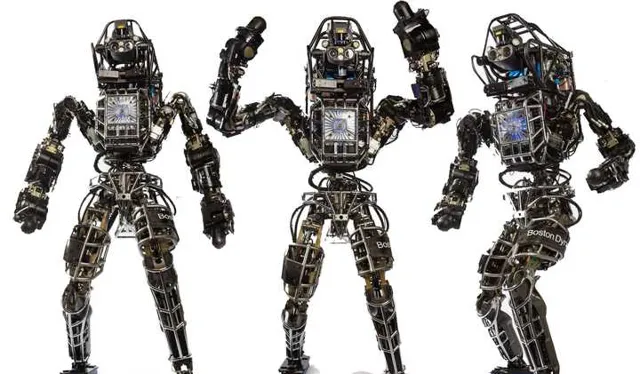
香港大學有一部Boston Dynamics造的Atlas人形機器人,他們有相關的機器人控制經驗.
-------------------------------------------------------
國外有幾家研究機構和Boston Dynamics做相似的研究



學術界目前沒有機器人的robustness達到了Boston Dynamics的水平。這家由Marc Raibert建立的公司本身就有MIT Leg Lab很多年的技術積累。而且他們擁有超一流的mechanical engineer。 據在那裏工作的師兄描述,他們的工作模式是上午在機器人上測試新的控制器/機械結構,一般中午機器人就會摔壞,但是他們下午當天就能把機器人修好並做出改進,供第二天做新的測試。這樣逆天的機械設計維修能力實在是讓人跪了。
Boston Dynamics的一大特點是使用hydraulic actuator,功率非常強,產生的力矩很大,但是控制起來難度很高。絕大多數學術界機器人使用的都是electric actuator,控制相對簡單,但是力矩也相對較小。這裏的例外的JSK做出的electric actuator,安裝在Schaft上面。使用電容儲能,水冷系統散熱,功率非常強勁(一個馬達的峰值功率幾乎可以趕上Boston Dynamics Atlas上好幾個馬達合起來的功率) [3]
Japanese Robot SCHAFT Shows Off Its Strong Limbs在學術界不太容易找到能夠把robustness做很好的機器人,一個重要原因是學術界的評價以發表論文為導向的,publish or perish。很多論文只需要理論漂亮就可以發表,實驗上面能夠成功80%就算優秀的結果。把成功率從80%提高到99%需要大量的engineering work,但是在論文中看起來並不算顯著的提高。所以學術界沒有特別強大的動力去提高robustness。但對於像Boston Dynamics這樣的公司來說,robustness是核心要求。畢竟他們作為軍方的承包商,需要造出來的裝置就是能在各種復雜/極端環境下能夠正常工作的。
[1] Design and Simulation for a hydraulic actuated quadruped Robot, Xuewen Rong, Yibin Li, Jiuhong Ruan, Bin Li, Journal of Mechanical Science and Technology 26 (4) (2012) 1171~1177
[2] A quadruped robot with parallel mechanism legs, Feng Gao, Chenkun Qi, Qiao Sun, Xianbao Chen and Xinghua Tian, 2014 IEEE International Conference and Robotics and Automation
[3] Design of High Torque and High Speed Leg Module for High Power Humanoids, J Urata, Y Nakanishi, K Okada, M Inaba, 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems.











