謝@速感科技 邀請。由於我個人的研究方向主要集中在機械臂這塊,機器人的其他領域只知皮毛,所以這邊也只能結合自己的經驗,粗略說一說。
先說結論,【美國機器人路線圖2016版】中指出:『在未來10-15年內,我們基本不可能制造出全能的通用機器人』,而我個人也比較認同這一觀點。所以,我就猜一個大於15的數位, 大概還需要50年 。
======以下具體說明======
【終結者】系列電影是我最喜歡的科幻電影之一,第一部【終結者】電影還是小學時跟我媽一起看的。但是,即使是1984年的T-800機器人也已經遠遠強於目前世界上的真實機器人。
要想做出類似T-800效能的機器人,我認為我們現在還有很多路要走。相對於其他技術( 智慧型手機、VR眼鏡、移動支付等),機器人涵蓋的技術領域更廣。所以,下面我根據機器人的研究領域,分別大概談談現在機器人的研究進展與問題。
( 以下非本人熟悉領域的內容均為道聽途說,如有誤,歡迎在評論區指出 )
其中,T-800機器人的資訊基本上來自一個叫做『 終結者百科』 的網站T-800,(現在真是什麽網站都有了。。。。)
我們先看看T-800吧
可以看出,T-800的機構設計基本 模仿人體 進行自由度分配,骨架為超合金(也稱 高溫合金 ),另外,驅動器采用的是 液壓模組 ;此外, 能源是小型 核子反應爐核燃料電池 (可以連續工作120年)。當然,史瓦辛格飾演的T-800具有 人的外貌 。
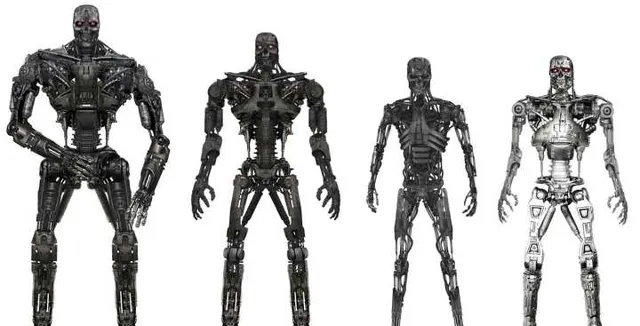
感謝機械前輩們幾百年的積累,目前在硬體方面,實際機器人已經不會比T-800差了,甚至可能優於T-800。下面是幾個比較著名的真實機器人:

但是,在 能源方面 ,我們離T-800還有一段距離。現在的移動機器人基本上都需要攜帶一個巨大的電池,續航能力也不行。這方面只能寄希望於新一代電池技術的發明了。
除此之外,T-800在一些細節方面也超過了現在的機器人研究水平:無摩擦軸承、能承受手榴彈攻擊的高強度骨骼、包含人體內迴圈在內的活體組織等。當然,這幾個不是人形機器人的必備功能。
這個包括兩個部份,一個是傳感器,一個是訊號處理:
傳感器 :機器人需要能夠感知周圍環境和自身狀態,因此需要安裝不同的傳感器。當然,這裏我們不清楚T-800到底安裝了哪些傳感器,所以簡單猜一下:聽覺傳感器(可以聽到聲音);多光譜高分辨率相機(能夠夜視、放大等);力矩傳感器;皮膚觸覺傳感器(可以感受到別人觸碰到自己)。
首先是 聽覺傳感器 ,這個似乎沒有什麽特殊的,普通麥克風即可。
其次,是 相機 ,現在機器人的視覺傳感器應該比T-800豐富,高精度相機、紅外相機、深度相機、雷射雷達等等。沒辦法,演算法不夠,傳感器來湊嘛。
之後,是 力矩傳感器 ,主要用於檢測關節力矩。有了精確的關節力矩才有可能部署一些控制演算法、估計環境狀態。當然,現在這樣的傳感器也已經有了,但就是貴。
最後,也是唯一與T-800有差距的地方,是 皮膚觸覺傳感器 :這個基本上還有很多路要走,不信的話看看下圖吧,這是去年RA-Letter上發表的一篇論文的工作: A Conformable Force/Tactile Skin for Physical Human-Robot Interaction

訊號處理演算法 :當然,這裏的訊號處理是廣義的訊號處理,包括普通的濾波、傅立葉變換等,也包括物體辨識、語音辨識等人工智慧演算法。這個話題就太大了,而且我們與T-800差距也非常大,我簡單列幾個:
物體辨識/語音辨識 :當然,隨著近幾年深度學習的發展,我們在物體辨識和語音處理方面的造詣已經非常厲害了,從前段時間百度的機器人『小度』在【最強大腦】中的表現可見一斑。

語意理解 :前面的語音辨識是指根據聲音辨識出文字,這裏則是理解辨識的文字內容。T-800與人類接近的水平就不說了,而我們現在研究的最高水平,可以參考微軟小冰聊天機器人,基本還是比較笨的。PS:不要跟我說什麽機器人『嬌嬌』,那是後面有個人在遙控。

環境理解/地圖建立 :這個簡單地說,就是機器人對環境建模的能力,包括地圖建立等。T-800就不說了,已經可以全球到處跑,甚至穿越時空回到從沒見過的過去也沒問題。相反的,現在的機器人在這一塊還是比較弱的,即使配備了雷射傳感器等額外的裝置(T-800只有雙目相機),也只能在一些特定條件下完成地圖建立,而基於地圖的環境理解也只能算剛起步不久,如下面這個語意地圖。
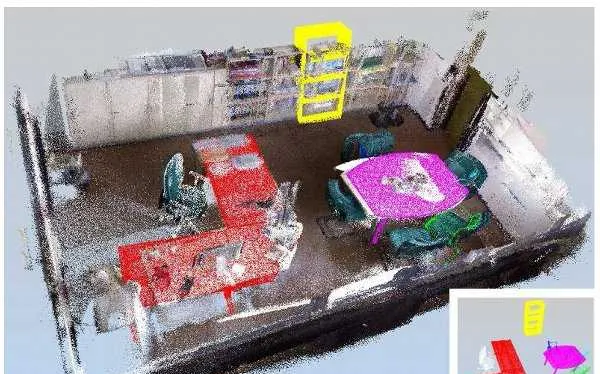
當然,我覺得之後隨著深度學習技術在地圖建立等領域的套用,(考慮到深度學習對環境理解的能力),這個領域估計有可能在十年內出現可實用的技術。
規劃是指根據任務和機器人當前狀態,計算出完成這個任務的方法。包括且不限於:任務規劃(將大任務劃分為幾個小的子任務),運動規劃(機械臂或者足式機器人各關節運動軌跡),路徑規劃(其實跟運動規劃類似,不過傾向於為移動機器人規劃形式路徑)。T-800的規劃水平已經跟人差不多,所以就不提了,來看看我們現在的機器人吧:
任務規劃 :舉個例子,我們想讓機器人送瓶雪碧,那麽機器人會將這個大任務分解成幾個子任務(運動到冰箱前-->開啟冰箱-->找到雪碧-->拿出雪碧-->關上冰箱-->送到人面前),當然,可以有更復雜的任務。目前,一般是采用MDP或POMDP模型來描述問題,然後用各種規劃演算法求解。總體上說,現在的任務規劃強烈依賴於任務描述方式(人工指定),而且在應對大規模、不完全可觀等復雜問題時,還沒有可靠的方法。
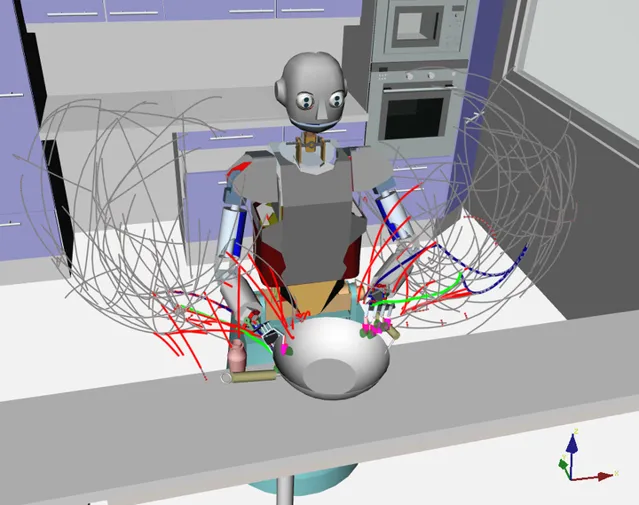
運動規劃 :舉個例子,機器人面前有一杯水,讓機器人將手運動到杯子面前,同時不能碰到桌子等障礙物。這就是運動規劃,根據目標狀態點,生成一系列關節運動狀態。是的, 現在就連讓機器人拿起面前的杯子這樣的問題也還沒有完全解決 。簡而言之,我們一般是采用基於隨機采樣的演算法進行運動規劃的。隨機采樣的意思就是:每次規劃的結果可能不同,更無法保證規劃出的路徑是最優的。因為自己就做這一塊,所以深知其中的坑。就我個人感覺,要解決運動規劃問題,需要一個方法論上的創新,拋棄現在這套方法(因為人肯定不是這樣規劃的啊)。
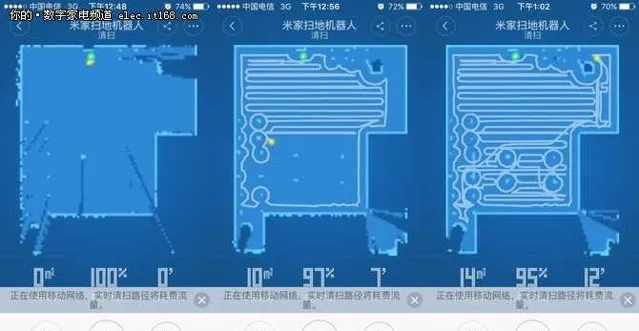
路徑規劃 :其實跟運動規劃是一個問題,但由於路徑規劃一般是在地面上,問題維度低,可以采用一些奇奇怪怪的規劃方法(Dijkstra,A*等)。由於問題畢竟簡單,這塊的發展也比較好,例如各種掃地機器人就已經可以在室內環境中到處跑了。
當然,這一塊需要解決的問題可能是:①動態環境;②擁擠環境;③復雜地形;④地圖不全的環境等。但是估計未來15年左右可以徹底解決,所以到那時候,估計無人駕駛車已經可以到處跑了。
控制 :
控制就是具體執行規劃結果的過程了,從底層的電機控制到上層的機器人全身控制都屬於這個範疇。我不清楚T-800的控制是怎麽做的,但看他可以到處跑、跳,基本可以確定現在的機器人控制技術還沒達到這個水平。但我們可以簡單看看現在的機器人控制已經什麽水平了:
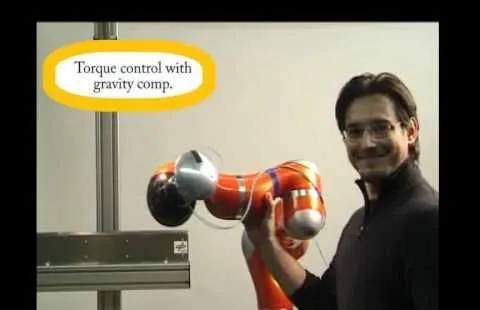
機械臂控制 :下圖是大約十年前 Sami Haddadin 做的機械臂碰撞檢測的demo,基本上已經非常厲害了。而且,由於機械臂控制屬於機器人自身動力學問題,所以目前看來,這一領域可以說已經是完全攻克了。
機械手操作 :但是,機械手的抓取操作問題就沒這麽簡單了,因為其中涉及實際物理環境的建模問題(摩擦力、形狀等),由於模型不精確,所以完全基於模型的方法很難解決這一問題。目前實際套用基本還是采用平行夾持器的方式。只有不少研究機構在進行靈巧手抓取方面的研究。

足式機器人控制 :這是更難的地方了,因為機械臂和機械手都至少有個相對固定的基座。足式機器人的base是會隨著接觸而發生變化的。所以,我一直覺得能做足式機器人控制的人都是很厲害的人。雖然很難,但還是有一些逆天的公司做出了不錯的足式機器人】。

上面這幾個足式機器人真的已經超級厲害了,但是它們跟T-800比起來,依舊還是渣渣。
這個屬於另外一大塊內容,由於可以套用到其他領域(控制、規劃、感知等),所以有時候不能單獨列為一類。眾所周知,現在深度學習很厲害了,但依舊需要依賴大量標記數據。
我之前在另一個回答(小紮說人工智慧仍需要人類給出足夠的引導,機器人需要完成「無人指導下的學習」,目前這種理論目前是否存在? - fly qq 的回答 - 知乎)中提到過,機器學習分為監督學習、無監督學習和強化學習三類。目前,深度學習主要在監督學習方面得到了很好的套用;此外,對於強化學習,也逐漸以Deep Q Learning等形式出現;但無監督學習才是機器學習中的最高挑戰。
T-800在電影中能學習微笑等奇怪的技能(也可以直接從資料庫中下載知識學習),正得益於其超強的學習能力。而其能根據資料庫中的人體解剖資訊,習得如何高效殺死人類(根據『終結者百科』),說明其已經具有了較強的無監督學習能力。

當然,機器學習的坑還有很多。因為,正是不斷學習讓我們能夠面對不斷變化的環境。這方面可挖的東西太多了。
這個就是機器人與人互動的問題。包括辨識人、與人交流、與人協作。在這個角度看,T-800已經跟常人無異(甚至強於人類)。但是,我們現在的機器人則還不盡如人意:
辨識人 :雖然人體辨識在機器視覺中已經有了很多成果,但是在人機互動過程中,機器人不僅要辨識到人的存在,還應該要能判斷人的動作、意圖,並作出相應反饋。
與人交流 :這方面,T-800早已經透過『圖靈測試』了(可以混入人類軍隊);而我們的聊天機器人雖然也已經做得不錯了,但離透過『圖靈測試』還很遠,隨便一個普通人都能輕易判斷出對面是一個機器人。
與人協作 :這個就不說了,T-800不僅可以與人一起做簡單的協同工作,還能夠給人分配工作。。。。;而我們真實的機器人還只能這樣:

容錯性 :
這個就是說機器人的軟硬體發生故障後,依舊可以自適應地完成部份工作,我們比T-800還是差很多:
T-800是這樣的:融解得只剩手了,還能給你點贊。

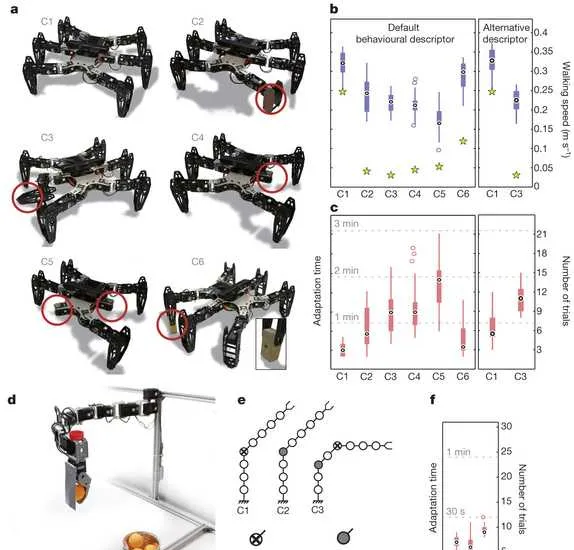
我們的機器人最強只能這樣:
2014年發表在Nature的成果,只是簡單的機構損壞、核心部件完好。
綜上,要想做到跟【終結者】中的T-800那樣的通用機器人,我們還有非常非常非常遠的路要走,前面說的50年都已經是很樂觀的估計了 。
當然,要想在十年內做出這樣的機器人也不是不可能,例如忽然來了一群奇怪的人說要教我們機器人技術:












