不講虛的
如果從自動駕駛全面普及為結果來看,目前能走通的路線主要有三種:
- 特斯拉的純視覺方案,在特斯拉AI日中,馬斯克甚至再次強調了特斯拉絕不用雷射雷達。
- 大部份主機廠的雷射雷達+高精地圖+公釐波+超音波雷達+網路攝影機的綜合解決方案。
- 少部份以道路為主的解決方案,即建造智慧道路,把車輛的行駛、控制權統一交給道路。
這三種無論是哪一種成功普及,對出行的改變其實是完全不同的。
先說第一種:純視覺方案。
從AI日的內容來看,特斯拉純視覺方案並不是沒有可能成功——
堅持不用雷射雷達的特斯拉,馬斯克對此的解決方法,應該是再次用到了「第一原理」。
—— 既然人類開車憑借眼觀六路耳聽八方就能完成,那麽對於自動駕駛系統來說,一定也可以按照同樣的方式去做到。 而且一旦做到了,毫無疑問成本會比雷射雷達更低。
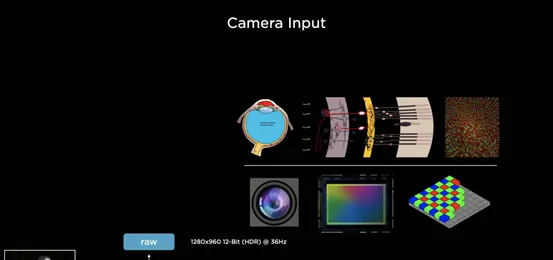
所以特斯拉純視覺方案,基本構建原則是把自動駕駛系統看作一個生物,有眼睛、有神經、有大腦。眼睛——網路攝影機,神經——影像處理,大腦——AI。
——負責人Andrej說:「我們希望能夠打造一個類似動物視覺皮層的神經網路連線,模擬大腦資訊輸入和輸出的過程。就像光線進入到視網膜當中,我們希望透過網路攝影機來模擬這個過程。」
方案設計好了之後,接下來的訓練也交給了釋出的超級電腦——Dojo。
訓練的方法是透過Dojo來模擬場景快速訓練,而這意味著特斯拉對外界的感知完全依靠視覺,那麽所謂的V2X也好,還是智慧公路也好,亦或是高精地圖也好,對特斯拉來說完全都不需要。
這種情況下,特斯拉對路況的適應能力是最強的,但同時也需要應對各種特殊場景,而這就意味著對於特斯拉的駕駛者來說,理論上自由度是最大的——視覺路線不需要依賴任何的基建設施,但對於駕駛者來說,可靠性要低於綜合方案和智慧道路方案。

特斯拉車主的出行方面,最大的變化是:
- 需要註意道路上不太常見的物體或者事情,例如道路上出現了一台拉風電站扇葉的車,這種車的長度或者寬度都和一般的車不太一樣,這樣的情況下就可能會處於一個不太常見的場景下,純視覺方案存在失效的可能性,需要車主準備介入。
- 純視覺方案下,我認為對於一些「老司機」的操作嘗試可能需要很長很長時間才能學成,例如十字路口你在中間車道準備透過,突然發現左邊的車速度明顯慢下來了,此時此刻你前方雖然沒有任何物體或者車輛,但應該還是要踩一腳剎車!類似這樣的例子是需要司機時刻關註的。
再說第二種:綜合方案
這個方案是目前最有可能普及方案,也是其他主機廠追趕特斯拉的最佳方式。
可靠性方面,在基建好的地區會比純視覺方案強。
出行方面,需要關註的是能使用的範圍——高精地圖在一些比較偏僻的地區可能就沒有了,這就意味著可靠性的下降。
最後說第三種:智慧道路方案
這個方案的可靠性是最強的,因為在智慧道路上不光是你自己的車,其他車的控制權也都會交給道路統一規劃管理,這就意味著超速、加塞這類事情是不會發生的,整體的交通效率也會非常高。
但智慧道路的普及程度會是個問題,因此這個方案會局限於少部份地區的道路上。
這樣的道路目前是有的,比如說:
8月31日,隨著G5517長益北線高速正式開通,意味著長沙建成了中國首條支持車路協同自動駕駛的智慧高速。
由湘江智慧負責建設營運的智慧高速計畫包括長沙繞城高速西北段、西南段63公裏以及此次開通啟用的G5517長益北線高速30公裏,全長共計93公裏。智慧高速打造了共計98個智慧網聯汽車相關場景,主要滿足智慧交通管理、智慧網聯汽車測試及網聯輔助駕駛等功能。












