寫在前面
全世界宣稱自己研究的腦機介面的實驗室可能有幾百個,但他們的研究內容可以非常不一樣,下面的討論就是幫助你確定自己想要研究的腦機介面究竟是哪個方面。你需要根據自己的想法來選擇與之匹配的實驗室。
腦機介面 ,英文名為Brain-Computer Interfaces(簡稱 BCI )或Brain-Machine Interfaces(簡稱 BMI ),它是腦與機器進行資訊交流的媒介。更大的概念是, 神經介面 (neural interfaces),它泛指所有能夠實作神經系統(除了腦,還有脊髓和外周神經)與機器交流的裝置。
從資訊傳遞的方向來看,腦機介面的功能可以分為兩種:「 讀 」(腦 → 機)與 「 寫 」(機 → 腦)。其中,「讀」包括:
(1)神經記錄
神經記錄的目標就是 記錄腦中神經元的全部資訊 (主要指電訊號),具體來說,這個要求可以分解為以下幾點:
- 高時間分辨率 。兩個動作電位之間最小時間間隔為1毫秒,如果要記錄是否動作電位有或無,至少需要毫秒級別的時間分辨率;如果要記錄動作電位產生和消失的完整過程,那麽時間分辨率要求更高。記錄電訊號的技術( 單電極、電極陣列、皮層電圖 ECoG、腦電圖 EEG )時間分辨率都很高,記錄磁訊號的 腦磁圖 MEG 也可以達到高時間分辨率。但 功能性核磁共振 fMRI 和 功能性近紅外光譜技術 fNIRS 的時間分辨率非常低(秒級別),因為它們記錄的不是電訊號,而是間接反應電訊號的血氧水平依賴的代謝訊號,即BOLD訊號。
- 高空間分辨率 。一般的神經元的胞體大概有50微米,要記錄單個神經元的電活動,電極需要足夠細。能做到這一點的是尖端極細的鎢絲電極或電極陣列,而 ECoG 和 EEG 電極太大,單個電極記錄到的可能是上百萬個神經元混雜在一起的訊號,fMRI 和 MEG 的體素(最小單位)大小為立方公釐級別,因此一個體素可能是十萬神經元混雜的訊號。
- 大範圍 。要看全腦的反應,可以用fMRI、MEG、EEG,但顯然這些技術都看不到單個神經元的活動。既要看的範圍大(「廣角鏡頭」)又要不減少細節(「高分辨率」),那麽需要發展 高頻寬 (「高像素」)的神經記錄技術。要實作這個目標,可以增加電極的數量(但電極過多,對腦組織造成的損傷越大),或者增加單根電極上的記錄位點的數量(即通道數)。目前NeuraLink可以記錄 3,072 個通道(Musk, 2019, JMIR [1] ),Neuropixel 2 能達到 5,000 個通道(Steinmetz et al., 2021, Science [2] ),Argo 更是達到驚人的 65,536 個通道(Sahasrabuddhe et al., 2021, JNE [3] )。但 Neuropixel 除了嚙齒類動物的大腦外,仍不能覆蓋猴子或人類的大腦,最多就是覆蓋幾個相鄰的腦區。而且能用得起 Neuropixel 的實驗室也是少數,因為成本太高了。據說 Neuropixel 要價幾十萬,而上千通道的電極陣列則更是貴得離譜的百萬。。。(同誌們,這是創業的好機會!)。另一種思路是將電轉為光的訊號進行記錄。目前 雙光子鈣成像 的方法一次性觀察上千個細胞,但缺點是雙光子能夠觀察的深度範圍有限。
- 長時間 。侵入式的記錄方法最大缺點就是會造成組織損傷,並且引起機體的炎癥反應。可能花大錢、辛辛苦苦做開顱手術埋植進入的電極在幾個月後就收不到神經元的訊號了。緩解這個問題的一種方法是改進電極的材料,讓電極變得柔軟,這樣的電極可以使用註射器到組織中並展開成一個網,叫做 網狀電極 或 柔性電極 (如下圖所示,來源:Liu et al., 2015, Nature Nanotechnology [4] )。據說 NeuraLink 也是受此啟發而做成 thread 電極的。此外,由於安全問題,侵入式的方法基本不能在健康的人類被試上做,只能在需要進行開顱手術治療的病人中試驗、或者患有嚴重癱瘓的病人甘願冒險一試。
由於神經記錄技術對神經科學的進步具有重要意義(畢竟巧婦難為無米之炊),而它又那麽地不完美,因此美國腦計劃就把著力點放在開發能夠記錄大腦全部資訊的技術上。而這需要奈米科學、材料科學與工程技術上的進步。好訊息是,在這方面有不少華人的身影,特別是做柔性電極的奈米科學的大牛Charles M. Lieber(近兩年被FBI調查。。) 的華人學生們,如方英、洪國松等。

(2)神經解碼
在物理上讀取神經資訊之後,需要對訊號進行處理以提高訊雜比(這屬於訊號處理的內容),更重要的是,需要數學上讀懂神經資訊。然而這又是另一個大難題,而且這不僅是腦機介面的問題,而且是整個認知與系統神經科學的問題。
在神經科學中,為了了解一個認知過程的神經機制,科學家需要相互配合。
首先, 認知神經科學家 透過設計精巧的、能夠分離出待研究的認知過程的行為範式,並使用 fMRI、MEG 等技術大致定位該認知過程發生的腦區。
接著, 系統神經科學家 在動物上使用侵入式方法,在認知神經科學家發現的候選腦區中記錄單個神經元或神經元群體的電訊號,然後分析這些數據、研究神經元動力學及其對認知過程的編碼。
但目前除了對高維神經數據進行降維外,缺乏更有效的分析手段,因此大家 對神經編碼的過程仍然不甚了解 。但即使這樣,仍然有辦法進行神經解碼。那就是 透過機器學習方法對神經數據中的模式進行辨識,用黑箱對抗黑箱,用魔法打敗魔法。。。
神經解碼的品質依賴於原始訊號的訊雜比,譬如采集的訊號是 EEG,那麽解碼的資訊不可能過於復雜,這可以套用於簡單的情景,譬如控制輪椅的前後左右運動和停止。如果要求精細的控制,譬如機械手指的控制,那麽可能需要使用電極陣列這類高空間分辨率的方法。另外在要求低時延的場景中,還需要考慮解碼演算法執行的速度。因此,神經解碼的進步需要依靠演算法層面上的研究。
當神經訊號被解讀出來後,就可以輸出到機器中或用於控制機器。如果解碼的是運動資訊,那麽就可以讓截肢或癱瘓的人指揮機械義肢或電動輪椅進行運動(如下圖所示,來源 Rajangam et al., 2016, Scientific Reports [5] );如果是解碼的是語音資訊,那麽就可以讓不能發聲的中風病人透過音響發出聲音(具體可以了解 Edward Chang 實驗室的工作);如果解碼的是視覺資訊,那麽就可以讓被試(譬如植物人)的想象或者夢境(Horikawa et al., 2017, Nat. Comm. [6] )透過螢幕投影出來……這方面的研究更多的看研究者的腦洞有多大。

廣義地來說,做認知神經科學和系統神經科學的實驗室都可以認為是做腦機介面的,但由於大家的興趣點主要在理解神經機制而非套用,因此並不宣稱自己是做腦機介面的。而有一類被稱為 人機互動 (human-machine interaction)的實驗室,他們興趣點在於將已知的神經科學知識轉為實際場景中的套用,因此他們會宣稱自己是做腦機介面的。
(3)神經調控
以上只是腦機介面透過「讀」所實作的功能,更強大的是, 腦機介面還能「寫」,這將改變神經網路的結構及其認知功能。 這種技術在神經科學中被稱為 「神經調控」(neural modulation) ,它能像控制電燈的開/關一樣,控制神經元的狀態(啟用/抑制)。
如果腦機介面兼具神經記錄和神經調控功能,譬如腦機介面透過解碼大腦運動意圖以控制機械手,機械手觸摸到物體後又把觸覺資訊透過腦機介面刺激神經元的方式反饋給大腦(如Flesher et al., 2021, Science [7] ),那麽我們稱這樣的腦機介面構成一個「腦 → 機 → 腦」的 閉環(close-loop)系統 或 雙向(bi-directional)系統 。
類似於神經記錄技術,神經調控技術也分為侵入式和非侵入式的。
侵入式的神經調控方法包括使用電極進行 電刺激 ,如在病人中使用的 深部腦刺激 (Depp Brain Stimulation,簡稱 DBS,因刺激的核團處於腦中深部位置而得名)和在非人靈長類使用常用的 微刺激 (Micro-stimulation,因使用微安級別的電流而得名)。
透過刺激神經元,無需感官輸入就能產生某種 感覺 (譬如刺激V1讓被試看到一個光點,刺激IT區讓被試看到面孔),或者讓感覺產生扭曲(譬如刺激MT讓被試看到的畫面產生扭曲)。對於復雜的、由神經元群體活動編碼的 運動 ,我們可以透過按照神經元群體的整體發放模式(即沿著神經流形)進行調控(啟用或抑制),復現某個復雜的運動序列。
但由於神經科學對復雜運動序列的編碼還不夠清楚,無法透過神經調控的方法讓被試產生新的復雜運動序列(譬如某個新的舞蹈動作)。類似地,目前我們對陳述性記憶的編碼也不了解,因此我們也不能向大腦寫入新的知識。所以說, 要實作神經調控在套用上的突破,很大程度上依賴於我們對認知過程神經編碼的理解 。
此外,深部腦刺激有效地 治療腦疾病 ,譬如帕金森病(如下圖所示,來源:Deep Brain Stimulation for Parkinson's Disease)、以及最近報道的重度抑郁癥(Scangos et al., 2021, Nature Medicine [8] )。但DBS治療疾病的機制還不甚清楚,能否有效治療其它神經或精神疾病仍是未知之數。
雖然電刺激是最直接的調控方法(因為神經元訊號本身就是電訊號),但它不夠精準,一個電刺激下來,電極周圍的神經元都會被啟用,而且抑制方法是簡單粗暴的把神經元電死的大電流。。。而目前已經在小動物上大獲成功的 光遺傳 (optogenetics)技術則可以透過分子標記物找到特定的神經元,從而在目標神經元上表達光敏感通道蛋白(可以是單種啟用或抑制的通道蛋白,也可以同時表達啟用和抑制的兩類通道蛋白),之後只要向神經元照射特定波長的雷射就可以啟用或抑制目標神經元。
非侵入式的神經調控方法則有 經顱磁刺激 (TMS)、 經顱直流電刺激 (tDCS),但它們只能無差別地刺激一大片腦區。。因此,要在正常人上使用神經調控,還需要有新的思路開發新型的調控技術。跟神經記錄技術類似,神經調控技術的發展依賴於奈米科學、材料科學與工程技術上的進步。
(4)神經義肢
腦機介面領域還會經常提到一個概念—— 神經義肢 (neuroprosthetics)。顧名思義,它是指需要接入神經系統的、用於替代因受傷或疾病等原因而受損的運動、感覺或認知器官的裝置。這意味著神經義肢必須含有神經介面,譬如「神經介面+機械手臂」才算是手臂的神經義肢,機械手臂本身不算。
已經被廣泛使用的神經義肢莫過於人工耳蝸,它替代了外周聽覺器官(鼓膜、鐙骨和耳蝸等)的功能,將麥克風收集並處理的聲音轉化為微電極陣列的電刺激,直接刺激聽覺神經。
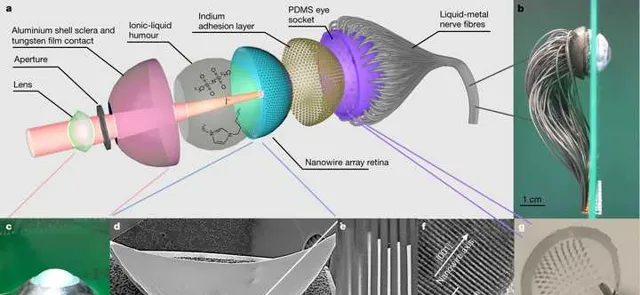
此外,替換外周感覺器官的神經義肢還有人工視網膜(見下圖,Gu et al., 2020, Nature [9] )和人造電子皮膚(Tee et al., 2015, Science [10] )等,甚至也有替換腦區的神經義肢,如海馬記憶義肢(Deadwyler et al., 2013, FiSN [11] )。隨著類腦芯片技術的成熟,神經義肢會與神經系統進行更加深度的融合。
(5)建議
綜上所述,腦機介面的能否商業化套用不僅依賴於套用科學(材料、演算法等)上的進步,還需要依賴基礎科學(神經原理等)的進步。
下面列出的大學與研究組來自之前的文章,供參考~ 這是前面答主們提供的資訊的擴充,感謝前面的答主,respect!

1 | 美國(90+研究組)
杜克大學 (Duke,4個研究組)
- Miguel Nicolelis (人類、猴子軀體運動與腦機介面;2014年巴西世界杯「機械戰甲」發明者、【腦機穿越】 作者;總被引數34k+)
- Dennis Alan Turner (帕金森病、艾爾茨海默病的自適應深部腦刺激和基因治療,抑郁癥的深部腦刺激,感覺恢復的腦機介面,癲癇發作機制;總被引數11k+)
- Jonathan Viventi (高分辨率、大面積的柔性腦機介面,癲癇的診斷和治療;總被引數5k+)
- Leslie M. Collins (基於物理的統計訊號處理、地下傳感、聽覺義肢和模式辨識;總被引數5k+)
加州理工學院 (CalTech,2個研究組)
- Richard Andersen (人類、猴子軀體運動與腦機介面,運動意圖,運動規劃,感官引導運動的座標轉換;總被引數46k+)
- Joel W. Burdick (機器人運動、基於傳感器的運動規劃演算法、多指機器人操作、套用非線性控制理論、神經義肢和機器人的醫學套用;總被引數10k+)
匹茲堡大學 (Pitt,12個研究組)
- Andrew Schwartz (運動控制、腦機介面;獼猴;電極陣列;總被引數18k+)
- Michael Boninger(輔助技術、生物力學、神經假肢、脊髓損傷、輪椅、再生醫學、教學研究;總被引數15k+)
- Aaron Batista (神經義肢,感覺-運動整合;獼猴;電生理;總被引數5.5k+)
- Jennifer L. Collinger(腦機介面、脊髓損傷、神經康復、輔助技術、神經義肢;總被引數4.7k+)
- George F. Wittenberg(神經康復,運動控制,經顱磁刺激,功能成像,中風,運動障礙,神經網路建模;總被引數4.4k+)
- Marco Capogrosso(神經修復學、電刺激電腦模型、手臂麻痹、脊髓損傷、腦機介面、運動控制;總被引數3.5k+)
- Robert Gaunt(神經義肢、感覺運動、功能性電刺激、脊髓損傷、膀胱功能障礙;總被引數1.7k+)
- Lee Fisher(神經義肢,體感功能,脊髓損傷,截肢,平衡控制;總被引數0.8k+)
- Elvira Pirondini(中風,運動控制,本體感覺,fMRI,EEG,生物標誌物;總被引數0.8k+)
- Mike Urbin(中風,脊髓損傷,電生理學,纖維束成像,神經調節;總被引數0.5k+)
- Lynn Worobey(脊髓損傷,輔助技術,幹預訓練計劃,活動監測;總被引數0.3k+)
- Amit Sethi(運動控制,中風,神經可塑性,神經康復;總被引數0.1k+)
布朗大學 (Brown,4個研究組)
- John Donoghue (BrainGate發明者之一,腦機介面,運動規劃;總被引數28k+)
- Arto V Nurmikko (侵入式腦機介面,雷射科學,奈米光子學,神經工程;總被引數22k+)
- Leigh R Hochberg (BrainGate發明者之一,腦機介面,癱瘓,中風,脊髓損傷;總被引數13k+)
- David A. Borton(感覺修復、運動控制、腦機介面;獼猴;電生理;總被引數1k+)
史丹佛大學 (Stanford,11個研究組)
- Zhenan Bao (鮑哲南;皮膚啟發電子器件與裝置,神經界面;總被引數132k+)
- Krishna V. Shenoy (人類、猴子運動控制與腦機介面;總被引數19k+)
- Guosong Hong (洪國松;柔性電極,可註射奈米天線和射頻發生器,紅外光遺傳,迴圈內部光源,機械發光材料,固態陶瓷磷光體;總被引數19k+)
- Jaimie Henderson (深部腦刺激,腦機介面,開發治療運動障礙、癲癇、疼痛等腦疾病的新型神經調節技術;總被引數14k+)
- Corinna Darian-Smith (運動控制、損傷後代償/適應;獼猴;電生理;總被引數2k+)
- Paul Nuyujukian (運動控制,腦機介面;總被引數5k+)
- E.J. Chichilnisky (人工視網膜;總被引數9k+)
- Boris Murmann (模數介面及其計算後端,傳感器、高速有線和RF 收發器,用於資料壓縮介面和嵌入式機器學習的系統驅動電路設計;總被引數8k+)
- Daniel Palanker (電神經介面,光學成像和光譜學,雷射與組織的交互作用,視網膜可塑性;總被引數6k+)
- Kwabena Boahen (神經形態芯片及其演算法設計;總被引數8k+)
- Nicholas A. Melosh (工程單元介面,腦機介面,金剛石和金剛石材料,能量和電子轉移;總被引數7k+)
加州大學舊金山分校 (UCSF,2個研究組)
- Edward chang (人類語音、運動與認知;總被引數25k+)
- Philip N. Sabes (猴子運動控制;總被引數3k+)
華盛頓大學 (UW,14個研究組)
- Jeffrey Ojemann (腦機介面,學習機制、觸覺反饋,遞迴刺激,手部運動的皮層表征,認知動力學,語言、大腦區域之間的高階非線性交互作用以及這些現象如何隨年齡變化,整合 ECoG 和 fMRI,顳葉癲癇;總被引數22.6k+)
- Eberhard Fetz (運動的神經控制,神經建模;總被引數19k+)
- Rajesh Rao (計算神經科學,腦機介面,人工智慧,印度河文字,印度古典繪畫;總被引數18k+)
- Howard Chizeck (遙控機器人系統的觸覺和安全性,腦機介面和功能性電刺激,殘障人士輔助器具開發;總被引數7.6k+)
- Wyeth Bair (統一的視覺處理神經環路模型,光學記錄系統研發;總被引數4.9k+)
- Bingni Brunton (神經大數據分析,自然行為量化,神經啟發稀疏傳感和控制,腦機介面的神經解碼;總被引數3.2k+)
- Eric Chudler (傷害感受、疼痛和多感覺整合的皮層和基底神經節機制;總被引數3k+)
- Steve I. Perlmutter (神經義肢療法,神經再生,運動控制;總被引數2.3k+)
- Andrew Ko (認知和行為的神經相關性,運動障礙的深部腦刺激機制,閉環深部腦刺激系統的開發;總被引數2k+)
- Adrian KC Lee (MEG/EEG/MRI,聽覺註意,腦機介面控制假肢;總被引數2k+)
- Ludo Max (正常發音的感覺運動控制和組織,口吃的神經運動和神經生理機制;總被引數1.8k+)
- Amy Orsborn (感覺運動系統、感覺運動學習和恢復感覺運動功能的介面;總被引數1k+)
- Azadeh Yazdan-Shahmorad (神經介面,大腦可塑性的恢復;總被引數0.2k+)
- Julie Arenberg (人工耳蝸與聽覺系統互動;總被引數0.01k+)
凱斯西儲大學(Case Western Reserve,14個研究組)
神經工程中心(Neural Engineering Center,簡稱 NEC)
- J. Thomas Mortimer (已退休;神經控制和假肢,神經組織的電啟用,膜特性和電極;總被引數18k+)
- Cameron McIntyre(皮層下腦結構的慢性高頻電刺激或深部腦刺激及其作為神經系統疾病治療的套用;總被引數13k+)
- P. Hunter Peckham (神經義肢、植入式刺激和控制,運動控制,康復工程;總被引數9k+)
- Dominique M. Durand (神經工程,神經義肢,神經動力學,神經系統的電和磁刺激,與電子裝置的神經介面,癲癇的分析與控制;總被引數8k+)
- Patrick E. Crago(已退休;控制運動功能的神經義肢,神經肌肉控制系統;總被引數5.6k)
- Dustin Tyler (擬神經神經義肢,喉神經義肢,神經電極的臨床實施,皮質神經義肢,微創植入技術,神經刺激和神經義肢的建模;總被引數5.4k+)
- Jeffrey Capadona(生物材料皮質神經義肢,電極介導的神經炎癥;總被引數5.1k+)
- Ronald J. Triolo(為有感覺運動障礙或肢體喪失的個人設計、原型設計和生產新型醫療裝置和康復、輔助或恢復技術;總被引數4.2k+)
- Robert F. Kirsch (使用神經義肢恢復運動,神經義肢控制系統設計,對人體運動的自然控制,運動的生物力學,基於電腦的建模,系統辨識;總被引數4k+)
- Kenneth Gustafson ( 神經工程,神經義肢,泌尿生殖功能的神經生理學和神經控制,恢復泌尿生殖功能的裝置,功能性神經肌肉刺激;總被引數1.5k+ )
- A. Bolu Ajiboye( 開發和控制腦機介面技術,以恢復遭受如脊髓損傷和中風的嚴重神經系統損傷的個體的功能;總被引數1.2k+ )
- Andrew Shoffstall( 開發用於生物電子醫學和神經義肢的低風險、低成本和高影響套用的微創神經介面,神經解剖學和生理學,生物材料,藥物輸送和炎癥;總被引數0.7k+ )
- Michael Moffitt(神經工程,陽極刺激、低振幅神經調節和對神經元件的光生物調節作用;總被引數0.5k+)
- Hamid Charkhkar ( 用於恢復肢體喪失或神經肌肉骨骼損傷患者的感覺運動功能的神經義肢,支持感官的輔助裝置,以改善平衡,轉化神經工程;總被引數0.4k+ )
哈佛大學 (Harvard,2個研究組)
神經技術與神經康復中心(Center for Neurotechnology and Neurorecovery,簡稱 CNTR)
- Sydney Cash (腦機介面,神經調控,癲癇發作機制,語音解碼,睡眠與夢,神經震蕩;總被引數15k+)
- Ziv Williams (獼猴的社會決策,人類認知處理,神經群體建模,腦機介面,神經調控;總被引數3k+)
約翰·霍普金斯大學 (JHU,2個研究組)
生物醫學工程系-神經工程
- Reza Shadmehr (狨猴小腦運動控制,帕金森病人的決策與運動控制;總被引數23k+)
- Sridevi V.Sarma(帕金森病,癲癇,腦機介面,慢性疼痛,決策制定和睡眠;總被引數1.5k+)
賓夕法尼亞大學(UPenn,1個研究組)
神經工程與治療學中心(Center for Neuroengineering and Therapeutics,簡稱 CNT)
- Daniel Yoshor(視覺義肢,癲癇;總被引數2k+)
哥倫比亞大學 (Columbia,3個研究組)
- Daniel Wolpert (運動規劃,感覺運動學習,感覺運動決策,機率與預測模型,腦機介面;總被引數52.4k+)
- Nima Mesgarani (語音處理,腦機介面,神經義肢;總被引數7k+)
- Mark M. Churchland (獼猴運動控制;總被引數5k+)
聖路易華盛頓大學 (WUSTL,3個研究組)
- Daniel W. Moran (神經義肢,腦機介面,運動控制,運動學習與可塑性;總被引數9k+)
- Kurt Thoroughman (人類學習與運動控制;總被引數2k+)
- Pablo M. Blazquez (前庭、運動學習、運動控制;獼猴;電生理、藥物學;總被引數1k+)
紐約大學 (NYU,3個研究組)
- Bijan Pesaran (運動控制、腦機介面;獼猴;電生理;總被引數5k+)
- Shy Shoham (細胞分辨率神經光學,介觀神經介面,神經調控;總被引數5k+)
- Zhe S. Chen (學習與記憶,工作記憶與執行控制,疼痛與記憶的即時腦機介面;總被引數4k+)
卡耐基-梅隆大學 (CMU,3個研究組)
- Bin He (賀斌;電生理源成像,非侵入式腦機介面,非侵入式神經調控,生物阻抗成像;總被引數21.8k+)
- Douglas J. Weber (運動控制,腦機介面;獼猴;電生理,腦成像;總被引數8k+)
- Byron M. Yu (腦機介面、降維演算法;總被引數4.6k+)
加州大學洛杉磯分校 (UCLA,2個研究組)
- Leif Havton (神經修復、運動控制、腦機介面;獼猴;電生理;總被引數3k+)
- Jonathan Kao (神經義肢,腦機介面,深度學習,神經群體動力學;總被引數2k+)
加州大學柏克萊分校 (Berkeley,2個研究組)
- Jose Carmena (神經塵埃發明者之一,運動控制、神經修復控制、腦機介面;獼猴;電生理、雙光子鈣成像;總被引數11k+)
- Michel Maharbiz(神經塵埃發明者之一,超音波腦機介面,微電機系統;總被引數4k+)
國立衛生研究院 (NIH,1個研究組)
- Leonardo G. Cohen (運動學習與記憶,神經康復過程增強,基於MEG的腦機介面;總被引數76k+)
麻省理工學院 (MIT,1個研究組)
- Hugh Herr (運動控制、腦機介面;人類;總被引數16k+)
加州大學聖地亞哥分校(UCSD,1個研究組)
- Vikash Gilja (腦機介面,神經義肢;總被引數3k+)
德克薩斯大學奧斯丁分校(UT Austin,1個研究組)
- José del R. Millán (腦機介面,神經工程,神經假肢,人機互動,統計機器學習,神經科學,神經康復;總被引數12k+)
塔夫茨大學(1個研究組)
- Robert J. K. Jacob (基於fNIRS的腦機介面;總被引數17k+)
東田納西州立大學(ETSU,1個研究組)
- Eric Sellers(腦機介面,註意力操縱,對ALS人群的縱向研究,傳感器改進,分析演算法改進;總被引數9k+)
巴特爾紀念研究所(Battelle Memorial Institute,1個研究組)
- Gaurav Sharma(腦機介面;總被引數0.9k+)
國家自適應神經技術中心(National Center for Adaptive Neurotechnologies)
- Jonathan Wolpaw (腦機介面;總被引數39k+)
南加州大學(1個研究組)
- Theodore Berger (海馬記憶義肢;總被引數12k+)
2 | 中國(30+研究組)
中國科學院 - 腦科學與智慧技術卓越創新中心 (2個研究組)
- He Cui (崔翯;猴子運動控制,運動學習,腦機介面和神經假肢,機器人學;總被引數1k+)
- Zhengtuo Zhao (趙鄭拓;長期穩定、超高頻寬的植入式腦機介面,腦疾病診療,腦機介面上下遊單元研發;總被引數0.5k+)
中國科學院 - 自動化研究所(1個研究組)
- Shan Yu(余山;資訊處理的腦網路機制,類腦計算與類腦智慧,腦機介面;總被引數0.1k+)
中國科學院 - 半導體研究所(1個研究組)
- Weihua Pei(裴為華;新型生物醫學傳感器,柔性電極;總被引數0.7k+)
中國科學院 - 國家奈米科學中心(1個研究組)
- Ying Fang (方英;高時空分辨率的活體電生理和電化學記錄技術,腦疾病機理與早期診斷,開發可穿戴柔性電子器件,開發基於新型奈米材料和奈米技術的超柔性電子器件及光電器件,開發可穿戴電子裝置;總被引數12k+)
中國科學院 - 上海微系統與資訊科技研究所(1個研究組)
- Hu Tao(陶虎;腦虎科技 NeuroXess 創始人;新型微納傳感技術領域研究,腦機介面,新型人工智慧感知芯片,生命電子資訊;總被引數1.1k+)
中國科學院 - 深圳先進技術研究院(1個研究組)
- Xiaojian Li(李驍健;面向寬頻腦機介面的神經電子和神經光子技術,面向神經仿真和類腦計算的神經環路解析和解碼技術,面向類人機器人的神經擬態裝置和系統研發;總被引數0.06k+)
- Chunshan Deng(鄧春山;視覺資訊加工,神經調控技術及套用)
清華大學(4個研究組)
相關機構: 腦與智慧實驗室
- Xiaorong Gao (高小榕;腦機介面與腦電訊號處理;總被引數11k+)
- Shangkai Gao(高上凱;神經工程與醫學超聲工程;總被引數9k+)
- Bo Hong (洪波;人腦語言網路與神經編碼、微創腦機介面;總被引數5k+)
- Dan Zhang (張丹;情緒辨識腦機介面、自然互動生理計算、教育神經科學;總被引數0.8k+)
- Milin Zhang (張沕琳;腦機介面套用的芯片設計及系統研發;總被引數0.8k+)
浙江大學(6個研究組)
相關機構: 腦機介面研究所
- Xiaoxiang Zheng (鄭筱祥;動物機器人,非人靈長類動物的神經解碼和意念控制,植入式腦機介面的臨床轉化研究;總被引數3k+)
- Weidong Chen (陳衛東)
- Yueming Wang (王躍明;電腦視覺和模式辨識,資料探勘,腦機互動;總被引數1k+)
- Shaomin Zhang (張韶岷;植入式腦機介面,動態神經集群解碼與分析及其在神經可塑性與神經假肢中的套用,靶向神經調控與腦疾病診療;總被引數1k+)
- Nenggan Zheng (鄭能幹;人工智慧、機器學習、腦機介面、資料探勘、行動網際網路和嵌入式系統;總被引數0.6k+)
- Kedi Xu (許科帝;雙向閉環植入式腦機介面,運動功能神經資訊解碼,神經功能調控,神經疾病的治療;總被引數0.2k+)
上海交通大學(4個研究組)
相關機構:電子資訊與電氣工程學院-人機互動
- Bao-Liang Lu (呂寶糧;類腦計算,神經網路,深度學習, 情感計算,情感腦機互動;總被引數10k+)
- Liqing Zhang(張麗清;腦機介面與腦訊號處理,統計學習與推理,物體辨識;總被引數9k+)
- Xiangyang Zhu(朱向陽;腦機介面,神經義肢,功能性電刺激,肌電圖,觸覺;總被引數4k+)
- Shanbao Tong(童善保;神經工程,神經訊號處理,雷射散斑血流成像,腦卒中康復技術,經顱超聲神經調控技術;總被引數3k+)
電子科技大學(3個研究組)
相關機構: 神經資訊教育部重點實驗室
- Dezhong Yao(堯德中;多模態成像方法,腦機對話,腦疾病,神經數據和神經計算模型;總被引數9k+)
- Peng Xu (徐鵬;腦電圖分析方法,腦機介面、生物啟發的人工智慧)
- Yun Qin(秦雲;腦機介面、腦-外周系統協調、認知增強,腦電圖和功能磁共振成像的融合;總被引數0.5k+)
華南理工(5個研究組)
相關機構: 腦機介面與腦資訊處理研究中心
- Yuanqing Li(李遠清;訊號稀疏表示、盲訊號分離、半監督機器學習、腦機介面、腦電與功能核磁共振成像訊號分析;總被引數5k+)
- Zhijun Zhang(張智軍;機器人、神經網路、機器學習、虛擬現實和人機互動;總被引數3k+)
- Zhu Liang Yu(俞祝良;訊號處理、機器學習、大數據處理及在腦訊號處理、智慧機器人、醫學數據處理中的套用;總被引數3k+)
- Zhenghui Gu(顧正暉;腦機介面訊號處理與模式辨識演算法及系統;總被引數1k+)
- Tianyou Yu(余天佑;腦訊號處理,腦-機介面,模式辨識,機器學習;總被引數0.8k+)
天津大學(1個研究組)
- Dong Ming(明東;神經傳感與成像、神經介面與康復、神經刺激與調控、神經義肢與仿生;總被引數1.9k+)
西安交通大學(1個研究組)
- Guanghua Xu(徐光華;腦機介面,康復機器人,狀態監測和故障診斷,數控機床動態檢測,生機電訊號處理;總被引數2k+)
3 | 德國
哥廷根大學(2個研究組)
- Hansjörg Scherberger (手部運動,腦機介面;獼猴;電生理;總被引數3k+)
- Alexander Gail (感覺運動整合,認知運動規劃,神經假肢,神經同步,視覺物體編碼;獼猴;電生理;總被引數1k+)
弗萊堡大學(Freiburg,4個研究組)
相關機構: 腦機介面研究
- Thomas Stieglitz (神經義肢、神經監測,化石相容性組裝和包裝;總被引數15k+)
- Michael Tangermann(機器學習,腦機介面,神經康復,人機互動;總被引數7k+)
- Tonio Ball(深度學習和摺積神經網路視覺化,建模和多尺度成像,現實生活中的神經生理學,智慧腦植入,神經倫理學和AI倫理學,腦機介面和神經機器人,VR和AR;總被引數6k+)
- Carsten Mehring(先天的額外手指帶來運動優勢,腦機介面和自然運動的並行控制;總被引數5k+)
圖賓根大學(Tübingen)
- Niels Birbaumer (腦機介面;總被引數76k+)
4 | 英國
帝國理工學院(3個研究組)
- Dario Farina (生物醫學訊號處理,神經康復技術,運動的神經控制;總被引數32k+)
- Etienne Burdet (人類運動控制,高效的輔助裝置,基於虛擬現實的康復和手術培訓;總被引數11k+)
- Juan Alvaro Gallego(運動學習和控制,神經修復技術;總被引數1.6k+)
牛津大學(1個研究組)
- Peter Brown (運動障礙及其治療;總被引數33k+)
新堡大學(1個研究組)
- Stuart Baker(運動控制;獼猴;電生理;總被引數7k+)
5 | 奧地利
格拉茲技術大學(Graz University of Technology,2個研究組)
- Gernot Müller-Putz (運動解碼,錯誤處理,基於腦電圖的神經義肢控制,意識障礙患者與BCI的交流,混合 BCI 系統,人體體感系統,腦功能對映,高分辨率照片,CLIPARTO 輔助技術中的 BCI,生物訊號分析和機器學習,神經資訊系統研究,用於自動駕駛的 BCI;總被引數14.3k+)
- Selina Christin Wriessnegger(運動意象的神經關聯、BCI 在健康使用者中的新套用、被動 BCI、潛意識視覺資訊處理、VR/AR 在學習和康復中的套用;總被引數1k+)
6 | 瑞士
Wyss 生物和神經工程中心 - 神經義肢中心(4個研究組)
註:與洛桑聯邦理工學院(EPFL) 合辦
- Olaf Blanke (意識的神經科學研究、人類神經科學技術的改進和開發,臨床研究中認知神經義肢的開發;總被引數18k+)
- Grégoire Courtine (脊髓損傷後感覺運動修復;總被引數11k+)
- Diego Ghezzi (人工視覺及其他神經障礙的微創和可更換的神經技術開發;總被引數2k+)
- Mahsa Shoaran (閉環神經植入物和腦機介面,神經疾病的診斷與治療;總被引數0.5k+)
蘇黎世聯邦理工學院(ETH Zürich,1個研究組)
- Stanisa Raspopovic(神經義肢;總被引數3k+)
7 | 荷蘭
荷蘭神經科學研究所(Netherlands Institute for Neuroscience,1個研究組)
- Pieter R Roelfsema (視覺義肢,視覺感知,記憶,可塑性;總被引數22k+)
烏特勒支大學(Utrecht University,1個研究組)
- Nick F Ramsey (神經義肢,語音腦機介面,低功耗腦機介面;總被引數14k+)
8 | 師承關系
9 | 公司
- NeuroPace(1997年創立,總部位於美國舊金山;侵入式腦機介面,癲癇治療)
- Neuros Medical(2008年創立,總部位於美國克里夫蘭;侵入式神經介面,疼痛治療)
- NeuraLink(由Elon Musk於2016年創立,總部位於美國舊金山;侵入式腦機介面)
- 寧矩 NeuraMatrix(2019年創立,總部位於中國北京,侵入式腦機介面)
- 腦虎科技 NeuroXess (2021年創立,總部位於中國上海;侵入式腦機介面,語言,運動)
- 階梯醫療 StairMed(2021年創立,總部位於中國上海;侵入式腦機介面)
- 博睿康 neuracle(2011年創立,總部位於中國常州;非侵入式腦機介面)
- Thync(2011年創立,總部位於美國舊金山;非侵入式腦機介面,睡眠調控)
- MindMaze(2012年創立,總部位於瑞士洛桑;非侵入式腦機介面,VR遊戲,神經康復)
- Halo Neuroscience(2013年創立,總部位於美國舊金山;非侵入式腦機介面,運動增強)
- MELTIN MMI(2013年創立,總部位於日本東京;非侵入式腦機介面,人機融合)
- Dreem(2014年創立;非侵入式腦機介面,睡眠調控)
- 強腦科技 BrainCo(2015年創立,總部位於美國波士頓;非侵入式腦機介面,註意力,假肢)
- Neurable(2015年創立,總部位於美國波士頓;非侵入式腦機介面,AR/VR遊戲)
- Kernel(2016年創立,總部位於美國洛杉磯;非侵入式腦機介面,MEG/fNIRS)
- 腦陸科技 BrainUp(2018年創立,總部位於中國北京;非侵入式腦機介面)
- 優腦銀河 Neural Galaxy(2019年創立,總部位於中國北京;腦認知,腦醫療,腦機互動)
註:(1)本文掛一漏萬,歡迎大家在評論區添加或指正;(2)總被參照數僅供參考,如需最新值,可到微軟學術或谷歌學術檢視。(3)更多師承關系可到NeuroTree檢視。
更多實驗室可以參考:
參考
- ^ Musk, E. (2019). An Integrated Brain-Machine Interface Platform With Thousands of Channels. Journal of Medical Internet Research, 21. https://doi.org/10.2196/16194
- ^ Steinmetz, N.A., Aydın, Ç., Lebedeva, A., Okun, M., Pachitariu, M., Bauza, M., Beau, M., Bhagat, J., Böhm, C., Broux, M., Chen, S., Colonell, J., Gardner, R.J., Karsh, B., Kloosterman, F., Kostadinov, D., Mora-Lopez, C., O'Callaghan, J.M., Park, J., Putzeys, J., Sauerbrei, B.A., van Daal, R.J., Vollan, A.Z., Wang, S., Welkenhuysen, M., Ye, Z., Dudman, J.T., Dutta, B., Hantman, A.W., Harris, K.D., Lee, A.K., Moser, E.I., O’Keefe, J., Renart, A., Svoboda, K., Häusser, M., Haesler, S., Carandini, M., & Harris, T.D. (2021). Neuropixels 2.0: A miniaturized high-density probe for stable, long-term brain recordings. Science, 372. https://doi.org/10.1126/science.abf4588
- ^ Sahasrabuddhe, K., Khan, A.A., Singh, A.P., Stern, T.M., Ng, Y., Tadić, A., Orel, P., LaReau, C., Pouzzner, D., Nishimura, K., Boergens, K.M., Shivakumar, S., Hopper, M.S., Kerr, B., Hanna, M.S., Edgington, R.J., McNamara, I., Fell, D., Gao, P., Babaie-Fishani, A., Veijalainen, S., Klekachev, A.V., Stuckey, A.M., Luyssaert, B., Kozai, T.D., Xie, C., Gilja, V., Dierickx, B., Kong, Y., Straka, M., Sohal, H.S., & Angle, M.R. (2021). The Argo: a high channel count recording system for neural recording in vivo. Journal of Neural Engineering, 18. https://doi.org/10.1088/1741-2552/abd0ce
- ^ Liu, J., Fu, T., Cheng, Z., Hong, G., Zhou, T., Jin, L., Duvvuri, M., Jiang, Z., Kruskal, P.B., Xie, C., Suo, Z., Fang, Y., & Lieber, C.M. (2015). Syringe-injectable electronics. Nature nanotechnology, 10 7, 629-636 . https://doi.org/10.1038/nnano.2015.115
- ^ Rajangam, S., Tseng, P., Yin, A., Lehew, G., Schwarz, D.A., Lebedev, M.A., & Nicolelis, M.A. (2016). Wireless Cortical Brain-Machine Interface for Whole-Body Navigation in Primates. Scientific Reports, 6. https://doi.org/10.1038/srep22170
- ^ Horikawa, T., & Kamitani, Y. (2017). Generic decoding of seen and imagined objects using hierarchical visual features. Nature Communications, 8. https://doi.org/10.1038/ncomms15037
- ^ Flesher, S.N., Downey, J.E., Weiss, J.M., Hughes, C.L., Herrera, A.J., Tyler-Kabara, E.C., Boninger, M.L., Collinger, J.L., & Gaunt, R.A. (2021). A brain-computer interface that evokes tactile sensations improves robotic arm control. Science, 372, 831 - 836. https://doi.org/10.1126/science.abd0380
- ^ Scangos, K.W., Khambhati, A.N., Daly, P.M., Makhoul, G.S., Sugrue, L.P., Zamanian, H., Liu, T.X., Rao, V.R., Sellers, K.K., Dawes, H.E., Starr, P.A., Krystal, A.D., & Chang, E.F. (2021). Closed-loop neuromodulation in an individual with treatment-resistant depression. Nature medicine. https://doi.org/10.1038/s41591-021-01480-w
- ^ Gu, L., Poddar, S., Lin, Y., Long, Z., Zhang, D., Zhang, Q., Shu, L., Qiu, X.Z., Kam, M., Javey, A., & Fan, Z. (2020). A biomimetic eye with a hemispherical perovskite nanowire array retina. Nature, 581, 278-282. https://www.nature.com/articles/s41586-020-2285-x
- ^ Tee, B.C., Chortos, A., Berndt, A., Nguyen, A., Tom, A., McGuire, A.F., Lin, Z.C., Tien, K., Bae, W., Wang, H., Mei, P., Chou, H., Cui, B., Deisseroth, K., Ng, T.N., & Bao, Z. (2015). A skin-inspired organic digital mechanoreceptor. Science, 350, 313 - 316. https://www.science.org/doi/abs/10.1126/science.aaa9306
- ^ Hwang, L., Choi, I., Kim, S., Ko, I., Shin, M., Kim, C., Kim, S., Jin, J., Chung, J., & Yi, J. (2013). Dexmedetomidine ameliorates intracerebral hemorrhage-induced memory impairment by inhibiting apoptosis and enhancing brain-derived neurotrophic factor expression in the rat hippocampus. International journal of molecular medicine, 31 5, 1047-56 . https://doi.org/10.3389/fnsys.2013.00120











