最典型的例子就是PID。
我們先看PID是怎麽回事,下圖是百度百科對PID的解釋:

可見,PID的確是自動控制中重要的方法之一。
我們設自控系統輸出量與控制點之間的偏差是e,於是PID輸出量Y的運算式為:
Y=K_de+K_i\int_{t1}^{t2}edt+K_dde/dt ,式1
式1的等號右側第一項是比例,第二項是積分,第三項是微分。比例用於實施與偏差大小成正比的控制,偏差e越大,輸出控制量就越大;積分用於減小長時間的微小偏差,微分則用於對瞬變訊號產生速動。
我們再看下圖:
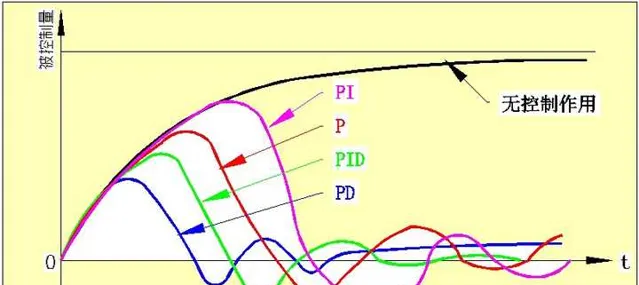
把圖2與式1結合在一起,就能理解PID是怎麽回事。
現在我們看下圖:
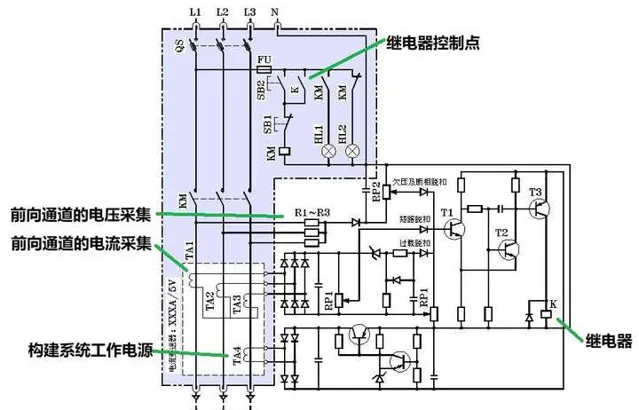
圖3是馬達保護與測控電路。當我們按下起動按鈕SB2後,接觸器KM閉合工作,馬達進入起動和執行狀態。電機在執行中無論是缺相、過載、過熱和短路,電路都能起動保護作用,使得接觸器開斷。
這裏用得到PID嗎?顯然不行,因為這裏不屬於過程控制,而是故障保護。因此,圖3中必定會有所改變。
註意看圖3中標註RP1電位器左側的電容,它起的作用類似積分,實作過載保護的延遲。再看T1和T2的施密特觸發器,T2的基極和集電極之間有一個電容,它對於翻轉和繼電器吸合也起到一定的作用。
我們再看下圖:

圖4就是真正的PID電路,此圖摘自我設計的一款溫度控制器。我們看到了比例P、積分I和微分D電路,當然都是用運放來構建的。此電路作為閘流體觸發電路的前置電路。
這些電路供參考。
由此可見,PID控制和真正意義下的自控,一般都用於生產的過程控制,對於快速的控制一般不會用到。
回答就到這裏吧。











