月初收到了工程机,写了个评测,不过工程机不是最终表现,要等上市看看实际表现了。
总体来说表现还可以,这价格的自集尘自清洁扫拖一体机可以说非常香了,目前来说还是有不错的先发优势,虽然是代工产品,但实测规划和覆盖效率没问题,清洁能力也不错,遗憾是没带高端一点的AI视觉避障,会有一定的被困几率,地面环境不那么复杂的话高效清扫全房是毫无压力的。
量产版本不翻车的话这样的价格会形成一个标杆,首先这价格直接抢了科沃斯的饭碗,而且之后其他品牌出的自集尘自清洁扫拖一体机无疑都会多多少少陷入价格战,打好了睿米加把劲研发在算法上加入视觉避障,从此也在扫地机器人界站住了脚跟,以后每一代都能分一杯羹。
对其他家的压力还是比较大的,至少像云鲸这样「起了大早赶了晚集」只有拖地功能,扫地功能很牵强还没有自集尘功能没有亮点的选手怕是要急了。
不管怎么样睿米的这一步对市场和消费者都是比较积极的,加速了各家对自集尘自清洁扫拖一体机的研发,以后这样的扫地机器人才是家庭标配。
目测明年中旬各家就会集中上市了同款了,带视觉AI避障再加上自动换水加水的完美版本也应该不远了,甚至可以期待一下像洗地机和扫拖一体机的集合版本。
以下是评测文(由于是工程机,体验时间有限,没有做深入评测,轻喷)
睿米真全能扫拖机器人 使用评测
睿米是个比较熟悉的家具家电品牌,主营产品为无线吸尘器、扫地机器人等产品,使用过几款睿米的吸尘器,表现还不错,这是第一次接触睿米的扫地机器人产品。
从以往的体验来说,睿米的产品稳定性和可靠性表现还不错,此前有过多款扫地机器人的使用评测经验,好不好或者在什么样的定位一眼可以看出差别。

产品分为集尘自清洁基站和扫拖机器人两部分,提供了集尘袋以及额外的拖布配件。

基站非常大,这是入手后的第一感受,搬来另外两台对比了一下,睿米真全能扫拖机器人的体积是最大的,不过对比云鲸J1来说并没有大多少,占地面积是同一个级别。


有着米家系产品的白色的设计风格,百搭不突兀,边角圆润,有一定的美学设计。对孩子也十分友好,放在客厅也颜值也是能够hold住的。
基站上的LED屏幕也增加了科技感,LED彩屏可以用动画的形式直观的展示机器人的工作状态,不同的状态除了动画显示外还有语音播报,简洁明了,每一步都有详实的展示,这点确实科技感拉满。

从顶部突出的激光头可以看出机器人是标准的LDS激光定位导航模式,目前LDS激光导航是主流配置,表现稳定,业界也有成熟的方案,看到这个基本上可以知道它的工作导航规划模式了。

全房的地图绘制以及标准的弓字形清洁覆盖就是依靠的LDS激光定位来实现的,睿米这款表现实测也是十分稳定,目前很少有扫地机器人还是乱跑乱撞的情况了,只要有个LDS激光传感器就差不多是同样的表现。

清洁效率方面的表现还不错,189㎡户型,总计清洁95㎡,时间102min。
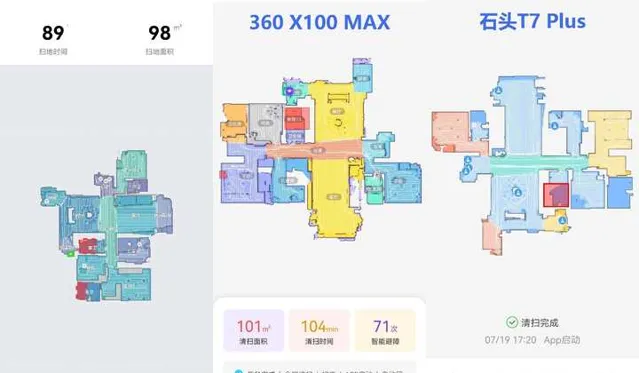
这是同户型下另外三款扫拖机器人的清洁报告,效率可以说不输任何旗舰级扫地机器人,要知道这里是扫拖模式,睿米真全能扫拖机器人还有个每隔固定时间回基站清洗拖布的过程,可以看到密密麻麻地回洗拖布轨迹线,总体来说睿米的效率可以说是非常高的。

前脸部分的传感器是睿米自主研发设计的LIDAR SLAM ROBOT,雷达避障传感器。
雷达大家都听过,可以根据雷达波的反射测试物体的距离和外形,在这里相当于扫地机器人的「眼睛」可以在靠近障碍物的时候识别出距离,主动减速避免碰撞。

雷达传感器的工作模式是可以在APP中切换的,可以根据需要打开或者关闭,关闭后会以前端的碰撞条为主,在有窗帘或者垂下接近地面的床单的情况下可以关闭雷达传感器,这样机器人才会穿过软质窗帘的材质。

没有穿帘需求的话建议日常开启雷达传感器功能,扫地机器人的动作会更加轻柔,可以实现零碰撞,也减少被困几率。

底部也是标准的扫地机器人的结构了,不过多了两块旋转式的盘式抹布来完成拖地工作,目前拖地机器人有两种形式,一种是平板式拖布,另一种是这样的旋转式拖布,平板式的相对省电,旋转式的清洁能力更强一些。

带拖布的结构也并未影响越障能力,2cm左右的门槛是可以轻松越过的。
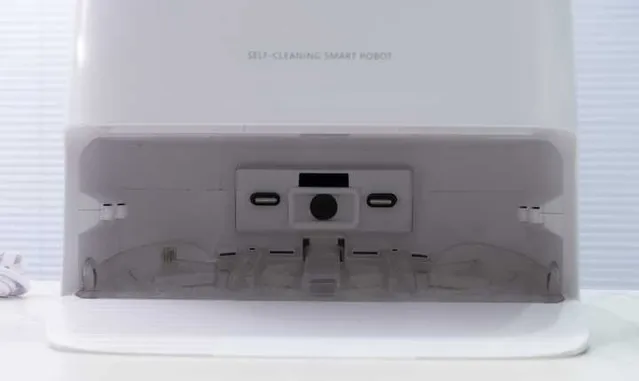
拖布自清洁部分的设计与云鲸的一样,旋转并且喷水冲洗,由底部的清洁盘刮取清洁布上的污垢,并甩干。
不同的是可以看到睿米这里设计了有四个扁平的出风口,由涡轮风机吹风,工作完成后可以吹干拖布,避免发臭发霉,不错的设计。

类似这样的结构在睿米此前的NEX VX吸擦一体机上可以看到,测试过这款,清洁能力还不错,同样可以自清洁拖布,在睿米真全能扫地机器人上可以说是这个一体机和扫地机器人的结合体,保持吸力的同时多了滚刷的刮取操作,总体清洁能力更强一些。

作为支持自集尘功能的扫地机器人,尘盒方面睿米在后端多开了一个口,支持集尘座直接吸取尘盒内部的灰尘和垃圾,回基站后可以在清洗拖布的同时一并集尘,二者互不干扰,设计得非常巧妙。

基站顶部打开有水箱和集尘袋设计,吸取后的灰尘等污垢会收集到这个集尘袋里。
集尘座的结构就是个大功率吸尘器,工作时一方面吸气,除尘,一方面把出气口设计在了底部,实现集尘时一并吹干拖布的操作,一举多得的设计了。

集尘袋容量没标注,拿出来和iRobot S9的对比了一下,容量差不多,根据家庭面积和地面灰尘量的不同装满的时间不同,从iRobot自集尘机器人的使用体验来看,家里三位长发女性,头发量也比较多,基本上常规户型可以2-3个月换一次集尘袋,免去了每周要清洗尘盒的问题。
不过滚刷的清理依然是个诟病,会缠绕头发,需要1-2周清理一次,这方面还是有待改进的,但目前行业大多数扫地机器人都是一样的情况,没有哪家能较好的解决这个问题,这个历史遗留问题解决了才是真的彻底解放双手。

水箱方面是4L的净水箱+4L的污水箱,对比云鲸J1(右侧)的5L水箱,容量少了一点,不过云鲸的水箱是对应300㎡水量的面积,睿米的4L对于大部分200㎡以下户型来说是完全够用的。


实测一次加水就可以搞定我的189㎡户型,中途不需要换水,上文中的清洁报告可以看到实际的清洁面积是100㎡左右,我设置的是12分钟回洗一次,装满4L净水箱的水差不多到第二次全房拖地时才需要加水和倒污水,体验还是比较好的。

4L水箱的体积和重量相较而言也比较友好,取放都还比较轻松,女性用户也能轻松搞定。

最后是污水盘的清洁,由于水流并不会对污水盘有直接的冲刷,会有风干后淤积的泥垢,需要每隔一段时间取出清洁。

直接取出来放水里冲洗即可,标配的胶刷也很好用。
总结
总的来说,这款睿米真全能扫拖机器人可以说是一个集大成者的表现,确实在一台机器上同时实现了扫拖外加自集尘、拖布自清洁的功能,也是市售功能最全的扫拖机器人了。

实测扫拖效果都不错,机器人导航规划稳定,清扫效率高。对于我家来说也不再需要先开扫地机器人扫完全房再开拖地机器人拖地了,睿米真全能扫拖机器人也一次搞定了扫拖这两件事,同时自集尘和拖布自清洁也免除了清洁后的维护烦恼,解放双手的程度是目前来说最高的了。











