首先,这个问题的完整 技术路线 可以参考这篇回答:fly qq:KUKA LBR iiwa 机械手是如何实现精密力控制的?
下面,我们分析一下用电流估计力矩做辨识,( 与直接用力矩传感器相比 ),可能存在哪些影响精度的地方:
我们用电流估计力矩,基本上就是默认 电流与力矩成正比 :
\tau_m = KI
然而, 这个假设可能并不完全成立 :
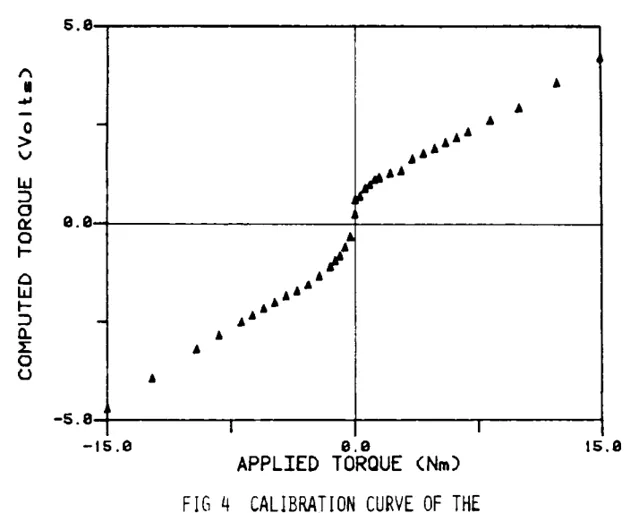 出处:Asada, H., K. Youcef-Toumi, and S. K. Lim. "Joint torque measurement of a direct-drive arm."
Decision and Control, 1984. The 23rd IEEE Conference on
. Vol. 23. IEEE, 1984.
出处:Asada, H., K. Youcef-Toumi, and S. K. Lim. "Joint torque measurement of a direct-drive arm."
Decision and Control, 1984. The 23rd IEEE Conference on
. Vol. 23. IEEE, 1984.
在零点附近,由于电机自身内部存在摩擦力,所以会有一点非线性的区域。所以,直接使用电机参数表上的力矩常数,可能会引入一点误差。
解决办法 :单独对电机的电流与力矩关系进行测量与标定,得到更为精确的力矩-电流关系:
\tau_m=f(I)
在这个前提下辨识的话,可以达到如下效果:
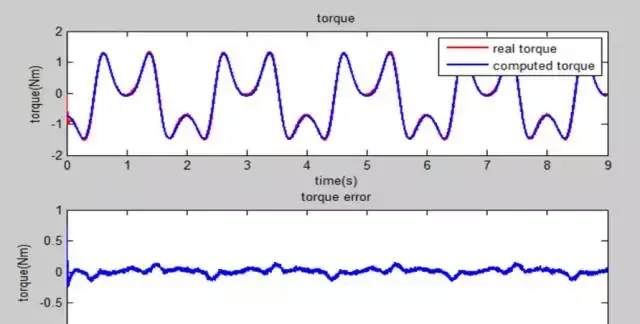 出处:我去年写的推送:听说现在协作机器人很火,所以我也做了1/7个
出处:我去年写的推送:听说现在协作机器人很火,所以我也做了1/7个
由于从电流只能估计得到电机输出端的力矩,与机器人连杆之间还存在 减速器 ,有传动,也就意味着存在摩擦力。
当然,常用的解决方法就是建立摩擦力的模型,然后把摩擦力模型的系数一同进行辨识。
然而,由于摩擦力形成原因未知、影响因素未知(跟速度大小、速度方向、温度、运行时间、负载等有关?),所以要想对摩擦力进行精确建模并不容易。
举个极端的例子,在一个大负载、行星减速器的关节上,效果入下:
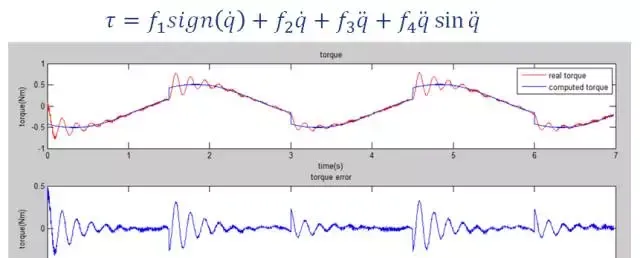
可见,机器人在关节换向的时候摩擦力大小会发生震荡,给定的摩擦力模型无法拟合这种波形。
后来分析,行星减速器的齿隙比较大,换向的时候首先要消除回程差。这时候相邻齿轮之间就会发生碰撞。这个碰撞就不是简单摩擦力能够表达的了。
还是那句话: 摩擦力的话,入坑需谨慎 。











