谢邀。
其实人造肌肉这个名字起得不是很好,更妥帖的名字应该叫电活性智能材料。因为我是做水下机器人方向的,所以接下来的举例我就以水下机器人为例了。
对于电力驱动的机器人的驱动机构(actuator)来说,大体可以分为两种:一种是纯机械驱动,一种是智能材料驱动。
纯机械驱动自然就是依靠数字舵机,步进电机这些直接依靠机械结构的配合与运转来驱动机器人身体部位的运动。智能材料驱动就是依靠类似于SMA (shape memory alloy)、EMA (electromagnetic actuation)、IPMC (ionic polymer metal composite)这些智能材料通电或者温度变化的产生的形变产生驱动力进行运动了。但是智能材料的形变量真的是太小了,精度也不够,所以很遗憾的告诉你,所谓的人造肌肉在机器人领域的适用范围真的很小。
下面我就以IPMC (ionic polymer metal composite)为例,稍微说明一下。
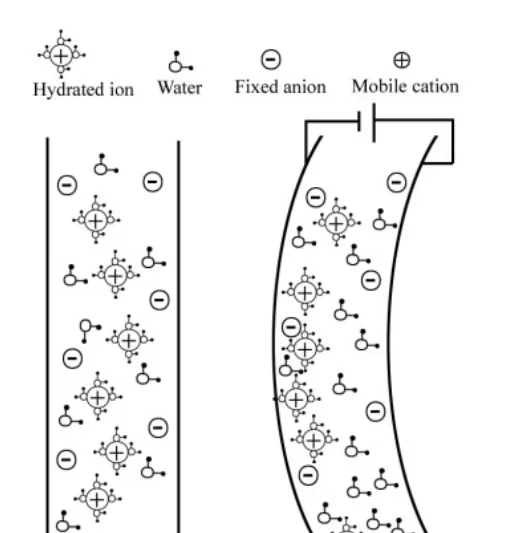
IPMC这种材料的特点就是,你只要对它通电,它就会产生形变,一般是对IPMC厚度方向施加电压时,IPMC会向阳极弯曲,原理见下图。那人们当然就可以利用这个特点,通电——形变——驱动,把他用在机器人身上,让它产生相应的运动咯。而且这种材料「体积小,质量轻;产生大运动而不需要轴承和滑动部件;驱动电压低」(百度百科),当然要好过电机什么的了,那个大的个头多占地方。
但是这个肌肉的的另一个特点与机器人控制上的一个重要需求有所相左,就是控制上不太好操作。一个数字舵机只要给一个占空比我就能让它转到我需要的位置,但是IPMC的形变却是一个非线性过程,需要我一点点的标定才能最后投入使用。而且他的形变量也十分有限,最大了从直的状态弯成九十度,而且还有一个弧度,不甚理想。
所以这样的智能材料可以用在控制精度不太高的地方,例如我想控制一个机器人,让它模仿水母的喷射式推进模式一张一缩的,也不需要非得控制到张开多少,收缩多少,只要能张缩,让机器人游起来就行,这样的领域智能材料倒是可以占据一席地位。Virginia Tech 就利用IPMC做出了一个仿生水母,但是速度只有0.77mm/s,大家感受一下。
总而言之,大多数的机器人控制中,控制精度是一个重要指标,而且鉴于运动范围比较小,所以所谓的人工肌肉并不能得到大面积的使用。
图片来源:Bhandari B, Lee G Y, Ahn S H. A review on IPMC material as actuators and sensors: Fabrications, characteristics and applications[J]. International Journal of Precision Engineering & Manufacturing, 2012, 13(1):141-163.











