我几年前曾经考虑过开发无人机探测系统,可以回答一下答主的几个问题。
首先一些进攻性无人机是没有控制信号的,根据预设的地点自己飞过去,或者反辐射无人机根据雷达作为目标飞过去,并不需要人控制。大部分此类进攻性无人机没有发射信号的需求,自然难以作为地面防空的制导方式。
制导方式都行不通,后面几种题主的思考,在现有武器中也各自有原型。比如两次助推流程可以参考军舰垂发系统的冷发射,单兵导弹的发射也基本都是类似的方式,哪怕RPG这么简陋也如此。
针对小无人机的打击,最困难的一步是探测,这一点其他答主也提到了。首先这类轻小无人机的外壳就不是金属,比较小的外壳用工程塑料,稍大的用玻璃纤维。相当一部分甚至不会用碳纤维结构件。这样的整个无人机,哪怕是伊朗的小摩托,在雷达上的目标也是非常小的,比各种五代战斗机还小。加上飞的低,雷达想要探测到这些轻小无人机是非常困难的。
现在乌克兰对此类无人机的防范方式,我猜测是在重要目标附近的空地上设伏,在无人机飞到防空系统那个很小的探测区域里时才能被探测到并打击。当然,跟传统防空十防九空一样,这种方法比如漏掉不少无人机。此类攻击无人机的飞行路径是可以提前规划一个复杂的路线,发射地点也不确定,所以并不是在发射地和目标的连线上设伏就行的。
以这些自杀无人机/巡飞弹的攻击方式,想用常用的,基于雷达的防空系统实现一个半径5公里的防御区域都有相当的困难。所以想做防空确实很难。相信未来几年,世界各地的战场都会大量使用自杀无人机,这东西的技术难度之低,使得很多国家都有研发出来的能力。
我几年前的探索,是基于声音的。一战和二战期间,一些国家就有基于声音探测敌方飞机的玩法。

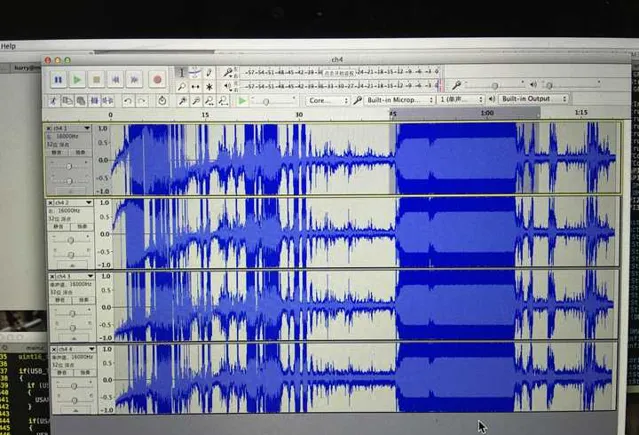
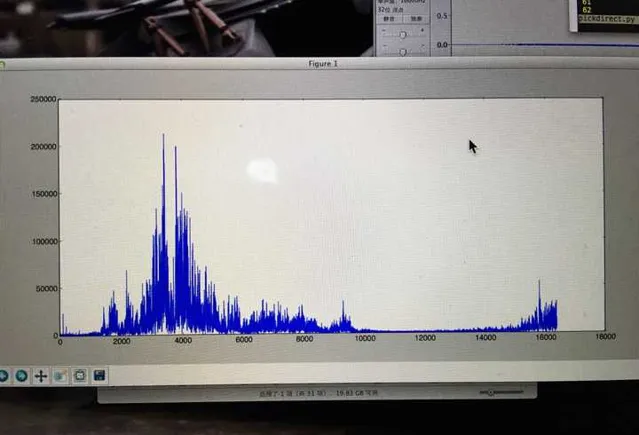
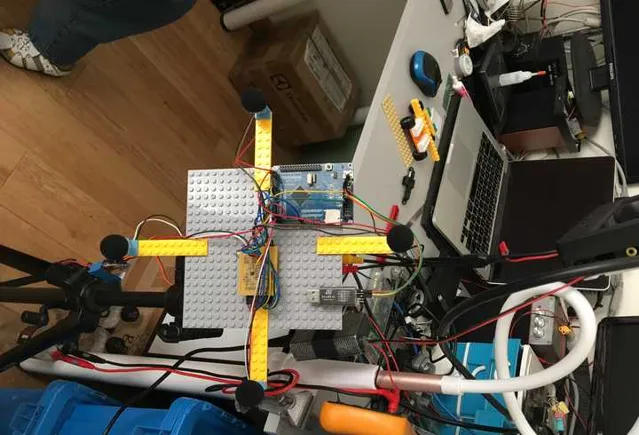
我的方案是通过麦克风矩阵,获得螺旋桨声音的相位,并控制云台对准无人机的方向,剩下的交给长焦镜头和计算机视觉。具体来说,4个麦克风,通过2个I2S的高精度音频ADC完成无相位损失的声音采集,然后电脑上FFT来获得声音的频率和相位。频率用来筛选螺旋桨特征,相位用基于各个频段投票来筛选出螺旋桨方向的实际相位差。
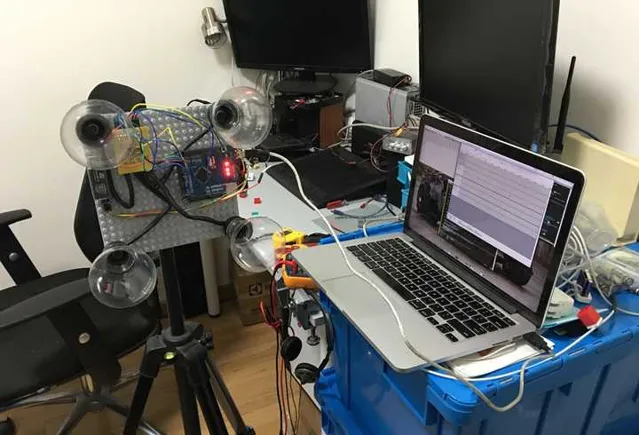
做了一些外场测试,重量1kg的四轴飞行器,飞行功率在150-200W。其声音可以在150米的水平距离探测到。相信增大喇叭口就可以继续提高一些探测距离。

只是通过声音相位能获得的角分辨率不咋样,我当时对螺旋桨声音的探测能做到10-15度。后来几年语音助手兴起,我看了一些研究成果,针对车喇叭一类频率固定的目标能做到5度甚至更好的角分辨率。
期间我也尝试扩大baseline来提升角分辨率,幅度不大,效果也不明显。
可惜的是,跟我众多个人爱好项目一样,烂尾了,……











