月初收到了工程機,寫了個評測,不過工程機不是最終表現,要等上市看看實際表現了。
總體來說表現還可以,這價格的自集塵自清潔掃拖一體機可以說非常香了,目前來說還是有不錯的先發優勢,雖然是代工產品,但實測規劃和覆蓋效率沒問題,清潔能力也不錯,遺憾是沒帶高端一點的AI視覺避障,會有一定的被困機率,地面環境不那麽復雜的話高效清掃全房是毫無壓力的。
量產版本不翻車的話這樣的價格會形成一個標桿,首先這價格直接搶了科沃斯的飯碗,而且之後其他品牌出的自集塵自清潔掃拖一體機無疑都會多多少少陷入價格戰,打好了睿米加把勁研發在演算法上加入視覺避障,從此也在掃地機器人界站住了腳跟,以後每一代都能分一杯羹。
對其他家的壓力還是比較大的,至少像雲鯨這樣「起了大早趕了晚集」只有拖地功能,掃地功能很牽強還沒有自集塵功能沒有亮點的選手怕是要急了。
不管怎麽樣睿米的這一步對市場和消費者都是比較積極的,加速了各家對自集塵自清潔掃拖一體機的研發,以後這樣的掃地機器人才是家庭標配。
目測明年中旬各家就會集中上市了同款了,帶視覺AI避障再加上自動換水加水的完美版本也應該不遠了,甚至可以期待一下像洗地機和掃拖一體機的集合版本。
以下是評測文(由於是工程機,體驗時間有限,沒有做深入評測,輕噴)
睿米真全能掃拖機器人 使用評測
睿米是個比較熟悉的家具家電品牌,主營產品為無線吸塵器、掃地機器人等產品,使用過幾款睿米的吸塵器,表現還不錯,這是第一次接觸睿米的掃地機器人產品。
從以往的體驗來說,睿米的產品穩定性和可靠性表現還不錯,此前有過多款掃地機器人的使用評測經驗,好不好或者在什麽樣的定位一眼可以看出差別。

產品分為集塵自清潔基站和掃拖機器人兩部份,提供了集塵袋以及額外的拖布配件。

基站非常大,這是入手後的第一感受,搬來另外兩台對比了一下,睿米真全能掃拖機器人的體積是最大的,不過對比雲鯨J1來說並沒有大多少,占地面積是同一個級別。


有著米家系產品的白色的設計風格,百搭不突兀,邊角圓潤,有一定的美學設計。對孩子也十分友好,放在客廳也顏值也是能夠hold住的。
基站上的LED螢幕也增加了科技感,LED彩屏可以用動畫的形式直觀的展示機器人的工作狀態,不同的狀態除了動畫顯示外還有語音播報,簡潔明了,每一步都有詳實的展示,這點確實科技感拉滿。

從頂部突出的激光頭可以看出機器人是標準的LDS激光定位導航模式,目前LDS激光導航是主流配置,表現穩定,業界也有成熟的方案,看到這個基本上可以知道它的工作導航規劃模式了。

全房的地圖繪制以及標準的弓字形清潔覆蓋就是依靠的LDS激光定位來實作的,睿米這款表現實測也是十分穩定,目前很少有掃地機器人還是亂跑亂撞的情況了,只要有個LDS激光傳感器就差不多是同樣的表現。

清潔效率方面的表現還不錯,189㎡戶型,總計清潔95㎡,時間102min。
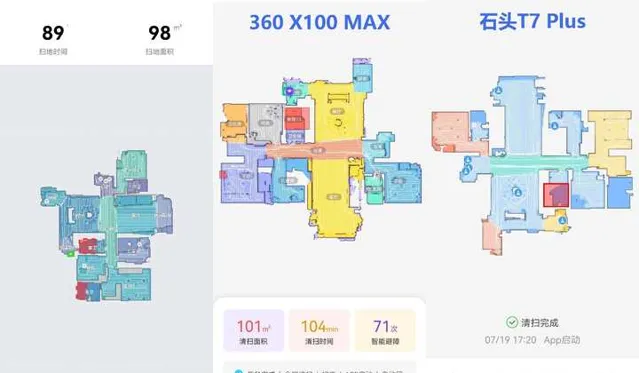
這是同戶型下另外三款掃拖機器人的清潔報告,效率可以說不輸任何旗艦級掃地機器人,要知道這裏是掃拖模式,睿米真全能掃拖機器人還有個每隔固定時間回基站清洗拖布的過程,可以看到密密麻麻地回洗拖布軌跡線,總體來說睿米的效率可以說是非常高的。

前臉部份的傳感器是睿米自主研發設計的LIDAR SLAM ROBOT,雷達避障傳感器。
雷達大家都聽過,可以根據雷達波的反射測試物體的距離和外形,在這裏相當於掃地機器人的「眼睛」可以在靠近障礙物的時候辨識出距離,主動減速避免碰撞。

雷達傳感器的工作模式是可以在APP中切換的,可以根據需要開啟或者關閉,關閉後會以前端的碰撞條為主,在有窗簾或者垂下接近地面的床單的情況下可以關閉雷達傳感器,這樣機器人才會穿過軟質窗簾的材質。

沒有穿簾需求的話建議日常開啟雷達傳感器功能,掃地機器人的動作會更加輕柔,可以實作零碰撞,也減少被困機率。

底部也是標準的掃地機器人的結構了,不過多了兩塊旋轉式的盤式抹布來完成拖地工作,目前拖地機器人有兩種形式,一種是平板式拖布,另一種是這樣的旋轉式拖布,平板式的相對省電,旋轉式的清潔能力更強一些。

帶拖布的結構也並未影響越障能力,2cm左右的門檻是可以輕松越過的。
拖布自清潔部份的設計與雲鯨的一樣,旋轉並且噴水沖洗,由底部的清潔盤刮取清潔布上的汙垢,並甩幹。
不同的是可以看到睿米這裏設計了有四個扁平的出風口,由渦輪風機吹風,工作完成後可以吹幹拖布,避免發臭發黴,不錯的設計。

類似這樣的結構在睿米此前的NEX VX吸擦一體機上可以看到,測試過這款,清潔能力還不錯,同樣可以自清潔拖布,在睿米真全能掃地機器人上可以說是這個一體機和掃地機器人的結合體,保持吸力的同時多了滾刷的刮取操作,總體清潔能力更強一些。

作為支持自集塵功能的掃地機器人,塵盒方面睿米在後端多開了一個口,支持集塵座直接吸取塵盒內部的灰塵和垃圾,回基站後可以在清洗拖布的同時一併集塵,二者互不幹擾,設計得非常巧妙。

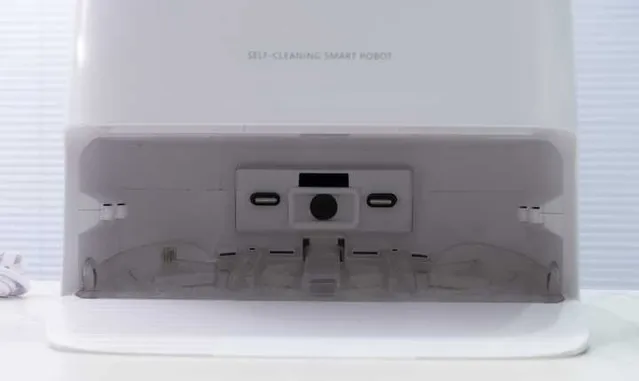
基站頂部開啟有水箱和集塵袋設計,吸取後的灰塵等汙垢會收集到這個集塵袋裏。
集塵座的結構就是個大功率吸塵器,工作時一方面吸氣,除塵,一方面把出氣口設計在了底部,實作集塵時一並吹幹拖布的操作,一舉多得的設計了。

集塵袋容量沒標註,拿出來和iRobot S9的對比了一下,容量差不多,根據家庭面積和地面灰塵量的不同裝滿的時間不同,從iRobot自集塵機器人的使用體驗來看,家裏三位長發女性,頭發量也比較多,基本上常規戶型可以2-3個月換一次集塵袋,免去了每周要清洗塵盒的問題。
不過滾刷的清理依然是個詬病,會纏繞頭發,需要1-2周清理一次,這方面還是有待改進的,但目前行業大多數掃地機器人都是一樣的情況,沒有哪家能較好的解決這個問題,這個歷史遺留問題解決了才是真的徹底解放雙手。

水箱方面是4L的凈水箱+4L的汙水箱,對比雲鯨J1(右側)的5L水箱,容量少了一點,不過雲鯨的水箱是對應300㎡水量的面積,睿米的4L對於大部份200㎡以下戶型來說是完全夠用的。


實測一次加水就可以搞定我的189㎡戶型,中途不需要換水,上文中的清潔報告可以看到實際的清潔面積是100㎡左右,我設定的是12分鐘回洗一次,裝滿4L凈水箱的水差不多到第二次全房拖地時才需要加水和倒汙水,體驗還是比較好的。

4L水箱的體積和重量相較而言也比較友好,取放都還比較輕松,女性使用者也能輕松搞定。

最後是汙水盤的清潔,由於水流並不會對汙水盤有直接的沖刷,會有風幹後淤積的泥垢,需要每隔一段時間取出清潔。

直接取出來放水裏沖洗即可,標配的膠刷也很好用。
總結
總的來說,這款睿米真全能掃拖機器人可以說是一個集大成者的表現,確實在一台機器上同時實作了掃拖外加自集塵、拖布自清潔的功能,也是市售功能最全的掃拖機器人了。

實測掃拖效果都不錯,機器人導航規劃穩定,清掃效率高。對於我家來說也不再需要先開掃地機器人掃完全房再開拖地機器人拖地了,睿米真全能掃拖機器人也一次搞定了掃拖這兩件事,同時自集塵和拖布自清潔也免除了清潔後的維護煩惱,解放雙手的程度是目前來說最高的了。











