因为每款机器,配置还有功能不一样,就像手机一样,安卓入门机和IPhone13pro能一样么?这里给大家分享下选购扫地机器人的参数,
还有各个价位机型推荐!想看具体推荐的可以翻到最后
一、什么是扫地机器人
有喜欢打扫卫生的小伙伴请举手,但凡超过2个算我输,自从有了扫地机器人,又懒又有洁癖的小伙伴,终于体验到了大户人家拥有清洁保姆的感觉。
下面我来好好掰扯掰扯,给还没入手的小伙伴避个坑。

1. 能干什么
扫地、拖地,清理90%以上的脏物,清如毛发、小型果壳、猫砂、灰尘、面包屑等细小垃圾,剩下10%属于大型垃圾,油污等,需要人工介入。不过这也极大程度减少拖扫地的次数,只要平时稍加注意,基本上可告别这一项家务。

2. 适合人群
社畜:
上班已经很累了, 回到家看到脏脏的地板,心情更糟
萌宠家长:
家里哪哪儿都是毛,刚拖的地,没过两分钟又有毛(谁养谁懂)
长辈:
减少长辈打扫家务的时间, 让他们多享受生活
大户型:
日常清理地板所需时间太长,换到谁身上都不划算
日常无法清理房间死角的人:
床底、沙发底下看不到不代表干净, 想想每次挪动它们的惨相
3. 如何工作
将充电座可插电的固定位置,机器人会在充满电后从此地出发开始清扫工作,同时,会创建一个包括障碍物的二维地图,规划房间有效的清理路径,完美覆盖全屋空间。清理完毕或需充电时,它会自动返回充电站充电。
依靠一对侧刷和一个滚刷,将遇到的的垃圾碎片,甚至是墙角的灰尘引导到吸尘口,再使用真空泵将垃圾吸到集尘盒内,最后,配合一个湿润的拖把附件,清理地板上的顽固污渍
毕竟家里的很多东西会移动,比如:椅子、电线、玩具、衣服、宠物粑粑之类的,甚至向下的楼梯也不用担心它会掉下去,机器人会通过三维深度传感器,避开不可预知的障碍物,且可通过2厘米的高度差,可轻易通过门槛条、毛毯等装置。
二、基本参数
1. 吸力
吸力只是清洁能力的
参考
参数,达到2000Pa往上基本够用,要想达到高清洁率,还得看其他参数。
2. 清扫方式
吸口式:
主要省去了底刷设计,单靠吸力处理垃圾,市面产品较少,相对清扫能力要弱于刷毛式;
刷毛式:
由边刷、底刷、吸口组成;边刷又分为单刷与双刷,边刷主要聚拢垃圾,再交给底刷与吸口处理;双刷聚拢效果要稍好,但清扫力度不一定更强;对于底刷,又分为滚刷与双胶刷。
区别:主要在于滚刷适合普通垃圾的处理,而双胶刷则对于毛发有更好的防缠绕能力。
3. 越障能力
越障高度普遍在2cm,属于一个普遍适应的高度。
4. 拖地模式
前扫后拖:
工作一遍即可将地板清理干净,较为节省时间。
扫拖分离:
先清扫一遍地板,再将清扫过的地板喷水后拖一遍,清洁效果更好。
三、关键参数
1. 虚拟墙类型
虚拟墙的作用就告诉机器人,这个区域不能进入,比如卫生间和厨房,卫生间湿哒哒的,而且会有毛发,缠绕在毛刷上,降低附件使用寿命。为避免这些问题,就靠虚拟墙来约束机器人。

硬件虚拟墙还是比较适合长辈使用,毕竟操作简单,替换、拆卸都很容易。
2. 避障类型
 3D结构光:
与结构光类型有关,散斑投射范围内可获得相对准确的深度信息,因图像为编码图案,较难完成图像识别,避障效果有限;
单目避障:
仅对已识别物体避障,且通过假设物体在地面,由图像高低预估距离,精准度低,避障效果有限;
双目避障:
可获得视觉范围内障碍物深度信息,同时根据物体识别结果进行策略性避障,综合避障性能高;
激光雷达:
可获得扫描范围内障碍物深度信息,但无法识别障碍物种类,无法进行策略性避障;室内机器人激光线束有限,很多扫描不到的障碍物无法避开;
3D TOF:
可获得面光源覆盖范围内障碍物深度信息,但无法识别障碍物种类,无法进行策略性避障;
3D结构光:
与结构光类型有关,散斑投射范围内可获得相对准确的深度信息,因图像为编码图案,较难完成图像识别,避障效果有限;
单目避障:
仅对已识别物体避障,且通过假设物体在地面,由图像高低预估距离,精准度低,避障效果有限;
双目避障:
可获得视觉范围内障碍物深度信息,同时根据物体识别结果进行策略性避障,综合避障性能高;
激光雷达:
可获得扫描范围内障碍物深度信息,但无法识别障碍物种类,无法进行策略性避障;室内机器人激光线束有限,很多扫描不到的障碍物无法避开;
3D TOF:
可获得面光源覆盖范围内障碍物深度信息,但无法识别障碍物种类,无法进行策略性避障;
综合来看,比较推荐
双目避障类型
的扫地机器人。
3. 导航技术
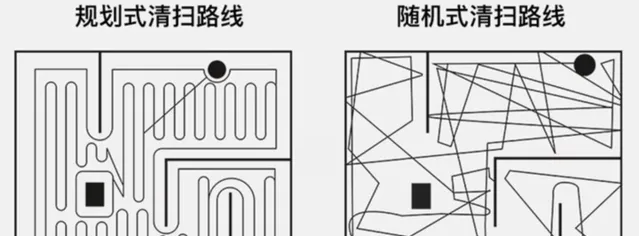
目前存在路径规划导航和随机导航两大类, 有路径规划功能的就不会放过房间内的任何一个死角,随机导航基本快淘汰,不建议购买。
 视觉导航:
基于激光雷达的SLAM依靠激光测距传感器对房间进行扫描,当激光投射到障碍物上时,会形成光斑,图像传感器会根据光斑的像素序号来计算到激光测距传感器的中心距离,再结合扫地机器人自身的算法,构建房间地图,并实时定位清扫
视觉导航:
基于激光雷达的SLAM依靠激光测距传感器对房间进行扫描,当激光投射到障碍物上时,会形成光斑,图像传感器会根据光斑的像素序号来计算到激光测距传感器的中心距离,再结合扫地机器人自身的算法,构建房间地图,并实时定位清扫
 激光导航:
视觉导航也叫vSLAM,扫地机器人上会有一个摄像头,和激光SLAM类似,通过收集到的点云数据计算障碍物距离,然后基于单目、鱼眼相机的vSLAM方案,利用多帧图像来估计自身的位姿变化,再通过累计位姿变化来计算距离物体的距离,并进行定位与地图构建。
激光导航:
视觉导航也叫vSLAM,扫地机器人上会有一个摄像头,和激光SLAM类似,通过收集到的点云数据计算障碍物距离,然后基于单目、鱼眼相机的vSLAM方案,利用多帧图像来估计自身的位姿变化,再通过累计位姿变化来计算距离物体的距离,并进行定位与地图构建。
 陀螺仪导航:
惯性传感器使用陀螺仪和加速度计得到机器人的角加速度和线加速度信息,通过积分获得机器人的位置信息。但是其精度也要受陀螺仪漂移、标定误差、敏感度等问题影响,但有一个缺点:有累积误差,随着行驶时间、距离的不断增加,误差也不断增大。因此相对定位法不适合于长时间、长距离的精确定位。可以把这种算法想象成盲人摸象,盲人也可以按自己的感觉做出走出直线、旋转180度的动作,看起来也是弓字形行走,但如果频繁转向、频繁碰撞,会越来越无法保持正确的行走方向。
陀螺仪导航:
惯性传感器使用陀螺仪和加速度计得到机器人的角加速度和线加速度信息,通过积分获得机器人的位置信息。但是其精度也要受陀螺仪漂移、标定误差、敏感度等问题影响,但有一个缺点:有累积误差,随着行驶时间、距离的不断增加,误差也不断增大。因此相对定位法不适合于长时间、长距离的精确定位。可以把这种算法想象成盲人摸象,盲人也可以按自己的感觉做出走出直线、旋转180度的动作,看起来也是弓字形行走,但如果频繁转向、频繁碰撞,会越来越无法保持正确的行走方向。
四、常见问题解答
扫地机器人吸力越大越好?
并不是哦。吸力过大,噪音也会明显,耗电也会更快。 实际清扫时,必然需要有进风口,有空气流动才能带动灰尘。如果没有空气对流,不管抽风的吸力多大都无法撼动碎屑,所以扫地机器人吸力数值的大小并不代表能否吸得干净。清扫效果好,噪音小,这样的扫地机器人才有好的清洁能力!
为什么扫地机器人经常「碰壁」?
一方面与扫地机器人自身的避障能力有关,另一方面有可能是清洁空间不足。一般来说,扫地机器人能不能成功避开桌子腿,就能知道它的避障能力如何。想要扫地机器人成为家务好帮手,记住以下的使用小tips: tips1:最好在使用扫地机器人时设置虚拟墙禁区,如在全局清扫模式时,设置禁区为卫生间。 tips2:清扫前请将电线、臭袜子等会让扫地机器人发生缠绕、卡死的物件全部收拾好,尽量给扫地机器人一个无障碍的工作区域。
为什么扫地机器人用不到几次就要充电?
可能是你的集尘盒满了!你是不是觉得很惊讶,这个有什么关系。这是因为使用时间长了,集尘盒集满后,扫地机器人就不容易把垃圾放入到集尘盒里了,吸力也会减弱,因此可能要打扫久一点才能清扫完毕,自然耗电速度也会更快。 tips1:定期清空集尘盒和滤网,才能让扫地机器人更好的运作。 tips2:保持充电桩附近无遮挡物,保证扫地机器人开始工作和返航充电运作正常。
为什么机器只会沿着墙壁扫?
这与扫地机器人的清扫模式有关。一般来说扫地机器人有五档清扫模式: 随机清扫:机器会根据不同环境进行随机自动清洁。 重点清扫:对于局部特别脏的地方进行旋转式清扫,是力度更强的一种清洁模式。 沿墙清扫:机器人会自动沿着墙壁进行清扫。 预约清扫:不在家的时候可以真正做到「我负责出门玩,它负责家里玩」的效果。 弓字型清扫:这种清扫模式需要将障碍物尽量移开,给予足够的清洁空间给机器。 tips:想要达到「指哪扫哪」的效果,应该选择重点清扫模式。
五、总结
给最近准备入手扫地机器人的小伙伴给个范围,有针对性的挑选:
1000元:
360扫地机器人X95 (性价比高,新人体验,长辈首选)
2000元:
小米全能扫地机器人(米家智能家居生态不错、具备家用不错的体验感)
3000元:
云鲸J2扫拖一体机,最大的优势就是升级了自动上下水功能,彻底解放双手
4000元:
不仅在智能控制系统的上做了很大的升级,而且避障模式和硬件方面也做了很大的升级,用起来更好用!智能化程度非常高!
5000元:
各方面参数都不错的机器,特别是在毛发清理、拖地程度、自动集尘功能上!
6000元:
这里想推荐的是科沃斯X1,但是知乎没有录入这款机器,所以就不放链接了,价格达到了5999元,可以说是目前扫地机器人中天花板级别了的,各方面都做的非常优秀,不差钱的可以入!











