大家好,我是 @微醺的工程狗,知乎家电博主,只用真实实验推荐良心好物~
追觅和云鲸这两台扫拖一体机其实微醺很早就已经收到了,但它们作为互联网新品牌做的一款全新新式的产品,除了常规的测试项目外,还让它们在我家实战了很长时间,以便观察看有没有什么隐藏Bug,确认无误后,才能写一篇负责任的评测~
利益声明: 本文除追觅和云鲸提供的测试样机外,无任何恰饭,可放心服用。
一. 外观

追觅的外观继承了米家的基因,整体白色为主,简洁大方,外表面采用磨砂处理,质感很好,外观设计甚合我意,在最近大火几款带基站的扫拖一体里,这个外观属于第一梯队的高颜值产品,与家居很好搭配。
云鲸则比较圆润一些,外表采用了光面外壳,塑料感比较强。
颜值:追觅>云鲸
二. 硬件配置
底盘配置

- 边刷
追觅采用五脚边刷,比传统的三脚边刷防击飞效果更好。
云鲸采用传统的三脚边刷。
边刷配置:追觅>云鲸
2. 主刷
追觅采用了浮动主刷采用毛刷+胶刷组合,地面贴合好,清洁能力强,但防头发缠绕比较差,不过影响不大,就算缠绕了,也只是损失少量清洁能力,就算不清理也能正常工作。配合D形机身,可处理到更多边角位置。
云鲸没有主刷... 只有一个吸风口... 且没有浮动,地面贴合不佳,因此扫地能力是偏弱的... 而且扫地和拖地不能同时进行,必须更换模块... 模块在地上来回滚,通常是很脏的,换模块的体验非常差,扫拖无法同时进行,是云鲸最大的痛点。
扫地配置:追觅>>云鲸
3. 拖布
追觅拖布采用了目前主流的旋转拖布,设置在主刷后方,可以做到扫拖同步,前扫后拖。旋转拖布在旋转时与基站肋条摩擦实现自清洁,基站只需提供清水即可,减少活动部件,可降低故障率。拖布有浮动设计,自带下压力,与地面贴合度好。但拖布位于D形机身的尾部圆形位置,拖布与边缘距离较远,边角容易拖不到。
云鲸拖布与追觅配置几乎一样,但拖布宽度几乎与机身同宽,可缩小拖布与墙壁之间不可清洁的范围,微醺非常期待它在后续实测中的表现。
拖布配置:云鲸>追觅
4. 地毯识别
追觅有超声波感应器,用于识别地毯,可避免拖布打湿地毯,也可以对地毯进行加强吸尘处理。
云鲸无此传感器。
地毯感应配置:追觅>云鲸
拖布烘干形式
追觅的基站配置了热风烘干,可加快拖布烘干速度,避免微生物滋生。
云鲸是冷风吹干,烘干速度较慢。
烘干配置:追觅>云鲸
地图和清洁规划传感器

两者的地图规划采用了有LDS激光雷达,特点是地图扫描速度快,精度高。
但追觅的LDS雷达有压力传感器,可防止扫地机被一些高度较矮或复杂的家居卡住。

例如这种欧式家居,下部裙边非常容易将扫地机器人的LDS雷达卡住,而有压力感应的机器人在识别到有碰撞挤压后,会绕开这个区域。
规划传感器:追觅>云鲸
避障传感器

两者的避障采用了机械避障和红外避障传感组合,对正前方,高度较高的障碍物可做到不碰撞绕行,但高度较低或者侧面的障碍物则靠轻触触发机械避障后才绕行,不过有个小细节追觅做得更好,它在碰撞条上设置橡胶条减小碰撞感应时产生的撞击力度和噪音,可以更好地保护家居,但这类传感器配置无法对地面的小物件进行识别,例如数据线小玩具一类的东西,还是会被推开。
避障传感器配置:追觅>≈云鲸
综上所述,硬件配置方面,追觅W10大部分配置都优于云鲸,特别是扫地部分可扫拖同时进行远远优于云鲸的分离设计;云鲸的主要优点在于拖布与机身同宽,可减少墙壁与拖布之间死角的距离。
三. 扫拖性能测试
家庭环境中,需要机器人处理的常见污渍有粉尘类,颗粒类,纸屑类,毛发类,水渍类,油污类,因此微醺给云鲸和追觅准备了一份超豪华混合大礼包~ 来看看它们能不能应对家居环境中复杂的污渍情况。
制备混合污渍豪华大礼包
最后,为了考验机器人对边缘的清洁能力,将混合污物布置在墙边,于是就有了下面这幅景象~

大约50*50cm的无敌混合大杂烩~
追觅W10先来一局~
通过视频记录可以观察到:
- 固体污物很少被边刷击飞,边刷可以很好的完成固体颗粒收集工作,但主刷下面有崩出黄豆,应是轮胎碾压导致的。
- 被击飞或带出的污物,在后续的清洁过程中被陆续回收。
- 对边缘区域只进行了一次清洁,中央主体区域进行了横竖交叉清洁,残余口红呈现边缘部分多,中央区域少的分布。
- 除口红外,即使是沾水后比较难清洁的头发和纸屑,其余污渍的清洁效果都很好,完整清洁后,视频区域内只剩口红还有明显残留。
清洁完成,来特写镜头观察一下战果~
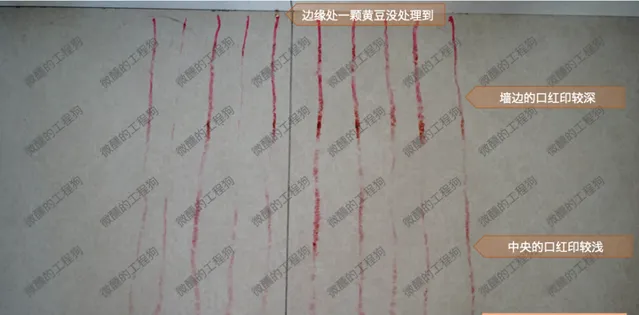
边缘处残留黄豆一颗,口红残留上粘有少量可可粉,无头发和纸屑残留,但在清洁区域以外,发现了头发丝,纸屑,黄豆各一粒,如果是全局清洁的话,有较大概率将它们重新捕获。

靠墙最边缘区域特写可以看到,拖布与墙有大约5cm的区域无法被拖布清洁到,因此有少量粘附的比较紧的可可粉残留,与拖布用水清洁的区域形成鲜明的对比,这个成绩不算非常满意,但也不太意外。
换云鲸J1上~
用厨房湿巾收拾掉残余的口红印,重新布置上同样的大礼包,换云鲸J1上~

这属于是把污渍涂抹均匀了这是... 云鲸J1遇到这种混合污渍几乎无能为力,甚至帮倒忙,但家里的污渍不会只出现固体也不会只出现湿污,总是有你也有我,无法处理混合污渍是云鲸J1最大的痛点,因此云鲸必须与一台独立扫地机器人配合才能较好的完成扫拖任务,否则就需要人工干预进行一次模块更换。
正当我苦恼这残局怎么收拾时,突然灵机一动,想到正好可以给追觅再加一档难度,看看这种涂散,摸匀,沾水的混合污渍,它能不能对付~
好在经过追觅的处理后,大部分污物被解决了,最后厨房湿巾解决掉残余的口红印和细尘,完美~ 领导回家绝对不发现我搞的破坏~
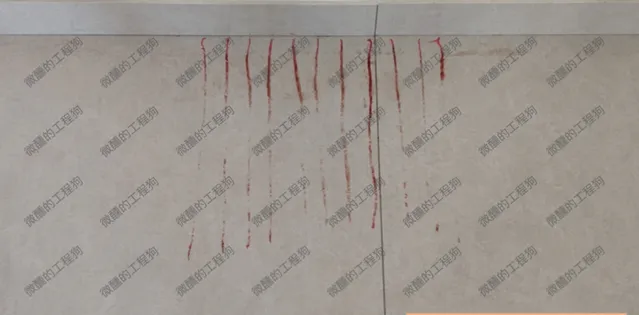
为了对比拖地能力,给云鲸减小难度,取消所有固体污渍,仅使用口红测试拖地效果。

可以看到云鲸J1对口红的处理能力与追觅W10相当,但这里微醺意识到有一个Bug,就是残留的口红多少与我下笔时的力度和角度的关系巨大,而我人工操作的力度是很难完全一致的,因此口红测试法其实不够严谨,以后的实验要考虑一致性更高的方案。
由于口红看不出来拖布与墙壁之间死区范围,所以我给墙边洒了点可可粉,再次启动拖地。
视频中可以看到,云鲸扫过一次后,残余可可粉的量依然较多,待两次清洁完成后,测量未清洁到的可可粉宽度。

边缘区域不太规则,未清洁区宽度大约在3cm左右,没有清洁到的部分就是完全没清洁到,大量可可粉原封不动地待在那里,跟追觅清洁过后剩余的细尘不可同日而语... 说实话,微醺其实有一丢丢的失望,毕竟云鲸的拖布几乎与机身同宽,理论上可以把边距缩得非常小,这是云鲸拖地最吸引我的地方,因此我对它的成绩期望其实是1cm的样子... 实测数据3cm没有达到我的期待,但也比追觅提高了2cm,看来各家在缩小边距方面都还有很长的路要走。
超级混合大礼包的测试结果与通过配置推测的结果比较一致:追觅扫拖组合的清洁能力非常强,可一次性处理大量混合污渍,扫拖同步相较于云鲸优势巨大;拖地清洁力两者相当,但云鲸墙壁边缘的死角范围比追觅小,优势没有预期的明显。
从两台机器的长期实际体验来看,云鲸必须再搭配一台扫地机器人才能比较好地完成清洁任务,先用扫地机扫一遍,再用云鲸拖一遍,确实可以实现光脚自由,但耗费的时间非常长,雪上加霜的是智能化程度不够,云鲸自家没有扫地机,只能用别家的,如果是家里没有小宝宝的上班族还好,上午定时扫地,下午定时拖地,回家就有清爽的地面,但前提是,扫地机器人能正常工作,否则回家就会发现没有扫到的区域四周都是被云鲸推开的头发碎屑一类的固体污物... 如果是有小宝宝或老人经常在家的家庭,扫一遍再拖一遍的耗时实在太长了,很多时候只能退而求其次,只扫不拖,周末全家出游啥的才能安排一次扫拖全套,但在外面玩时经常忘记点拖地,然后就是半个一个月不拖地... 光脚自由也就无从谈起了...但保持基本的清洁是能做到的,因此,即使是有扫地机器人配合,云鲸J1在易用性上还有很大的提升空间。一丢丢题外话:最近它的净水箱还莫名其妙的自裂了... 不知是个例还是普遍现象...
追觅由于是真正的扫拖一体,扫拖可以同步进行,在米家APP设置好离家模式,老人出门遛娃时,一键全屋关灯扫地,然后就不用管了,回到家时就是干净清爽的模样,更像是一个机器人该有的样子。由于每天都进行一次扫拖,所以即使是清洁能力比较薄弱的墙边区域其实也不脏,因为平时家里根本就没有测试时那么严重的污渍,可以更轻松地实现光脚自由。
综上所述,扫拖综合性能:追觅>云鲸
四. 避障能力
越障高度

微醺手上有一块1.8cm厚的木板,正好拿来测试它们的越障能力。
追觅W10可以轻松越过1.8cm的木板,而云鲸则无法通过,对于有大量门槛石的家庭,更强的越障能力可以避免机器人被门槛石档住。
小物件
有小孩的同志们都懂的,家里总是有大量小玩具,即使没有小玩具,地面也容易掉落一些小物件,很容易被扫地机器人推走或吸进主刷卡住,因此对小物件的避让能力,是考验机器避障性能的一项重要指标。
没有一丝丝意外,两台机器都是采用的是一样的避障方案,都直冲冲地把玩具推开了...
数据线
数据线可以说是扫地机头号杀手了,吸进去必定卡住主刷... 于是试试呗~
试试就逝世,没有一丝丝意外,双双夭折,均无法识别地上的数据线。
家具
家具人人家里都有,对家具有效避让可减少碰撞,保护家具,降低噪音。
两台机器都能对家具做出有效反应,在正面遭遇家具时,可以提前转弯,但侧面还是要依靠碰撞传感器接触后才能做出反应,主观感受上,追觅的沿边清洁和动作流畅度比云鲸略好,撞击强度较弱。
此外追觅还有LDS压力传感器和超声波地毯感应,这是云鲸没有的,因此避障能力方面,两台机器在主要的家具避让和小物件避让方面性能相当,但追觅的细节做得更多,可应对的场景也略多一些,综合来看追觅>≈云鲸。
五. APP及其他小细节
让云鲸跟追觅比APP和智能是欺负云鲸了... 追觅的后台米家APP,全球最大的智能家居平台,用户最多,接入设备最多,联动功能丰富,不是云鲸的APP能比的... 但追觅的APP依然有较大的改进空间,这里就不讲云鲸了,给追觅提点改进建议:
- 装上拖布后就不能单独扫地里,建议增加装了拖布后可单独扫地的选项。
- 全屋只能采取一种清洁模式,应该允许设置不同区域使用不同的模式,例如卫生间浴室湿漉漉的概率比较大,可以设置成只拖或者先拖后扫。
- 现在的程序对地毯采取的避让方案,实际上我观察下来,拖布的一点潮湿对地毯的影响不大,应允许用户设置在有拖布的情况下也可以上地毯,同时启动超强吸力对地毯进行清洁。
- 有一点追觅应该向云鲸学习,就是可以设置不同的清洁计划,哪个房间怎么清洁,清洁多少次,都可以设置好并保存。这样可以更好地满足不同的清洁需求,例如周末出游时,空余时间多,可使用一个超级大扫除计划,执行多次强力清洁;平常短暂出门,就使用单次的超快程序,进行基本维护,省水省电省时间~
- 由于追觅整合了扫拖两项功能,两项功能都耗电,因此即使追觅的电池更大,但也经不住挥霍,特别是使用超强吸力模式,家里户型较大的话很容易扫一半就没电了,建议后续继续加强电池续航。
六. 总一个结
追觅W10在外观设计,硬件配置(热风烘干,浮动主刷,橡胶保护条,LDS压力感应,超声波感应等等),扫拖清洁能力,避障性能,APP和智能上均优于云鲸J1,特别是扫拖同步比云鲸的分离设计更方便,可一次性处理家庭环境中各种常见污渍。云鲸唯一比追觅好的一点是拖布宽度与机身几乎同宽,拖地时的清洁死角比追觅小,但通过实测发现,其死角范围仍有3cm,只比追觅缩小了2cm,优势不如预期的明显。
购买建议
在这两台机器人之间选择的话,且你本来没有扫地机器人,那么无疑是追觅W10更好,没有任何悬念,毕竟技术是在不断进步的,追觅W10是时下新品,而云鲸J1已是几年前的老款,败下阵来也情有可原。
如果你已经有一款旗舰级的扫地机器人(或者家居环境简单)没有卡住扫地机器人的烦恼,甚至还有自动集尘功能,现在只需要一台拖地机作为补充,且作息规律,家中长时间无人,可以设置定时清洁,并且对减小一丢丢清洁死角边距比较在意的话,那么云鲸J1更适合你,不过现在这个时间点,J2已经出来了,虽然最大的痛点扫拖分离没有解决,但可以配置上下水模块,也是解决了一个比较大的痛点,同时越障高度提高到了2cm,吸力提高到2500Pa,配备了热风烘干,价格却没有明显提高,因此入手J2的性价比更高。
在这两台机器之外的话,目前微醺最看好的是米家免洗扫拖机器人普通版,虽然是震动拖布,理论上单次清洁力度差一些,但价格便宜啊,2499元,还要什么自行车,而且避障配置比追觅和米家Pro更好,能避开一些小物件,被困几率降低,更能稳定地完成每一天的工作,显然比经常需要在角落里解救的机器人更值得信赖啊~











