自动驾驶基座模型
自动驾驶的GPT模式大规模预训练方法。自动驾驶最大的痛点:数据需求量太大,标注成本太高。如果能像GPT那样先通过大规模无监督预训练获得智能,然后标注少量数据微调,那该多好啊!这个东西有时候叫World Model ,有时候叫Foundation Model,比较杂。但总归是这么个意思,就是复制ChatGPT的成功。
现在的状态:
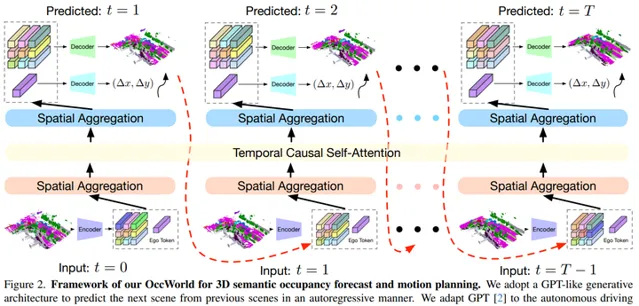
仍然不令人满意,主要是数据太少,像样的车企都是几百上千万的视频,公开数据集的数据根本没法看。缺乏数据,训练这样的模型只能大概看个样子。其次预训练任务也可以再改改,学一下伯克利LVM的做法。
但真正的突破应该不会来自科研机构,只会来自掌握数据的车企,或者谁来创建个大数据集引领一下。我仍然相信特斯拉,现在这个方向基本等于明盘了,堆数据堆算力即可。
有LLM参与的自动驾驶
参与方式很多,现在是各方向全面开花的状态。现在的状态:
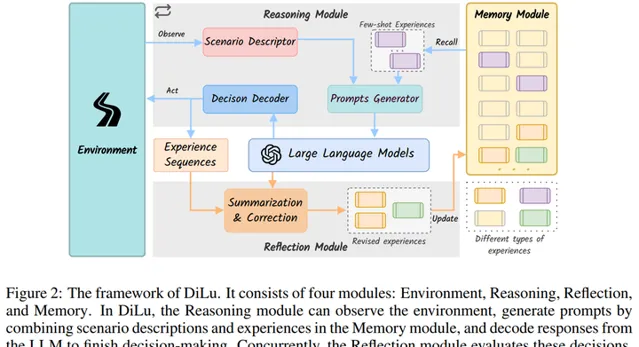
这个框架,可以说非常完美了。之前我还对那个memory module颇有微词,觉得这属于作弊。现在我已经改变看法了,记忆模块没有任何问题,人不也是靠记忆开车?到了某个场景,人会回忆老师教过的一套行为模式操作。杨乐昆的世界模型里也有记忆模块,如果记忆模块能解决问题,那就记吧!
要真正跑起来,还需要去nuPlan之类的数据集上测,然后把LLM小型化。明年应该可以!
基于NeRF的自动驾驶闭环仿真
通向自动驾驶的最后一公里:闭环仿真。用于训练RL是必须的,前面某回答里我说强化学习最大瓶颈就是仿真器,只要能仿真,强化学习一定秒杀人类。而使用游戏引擎渲染场景则面临人工建模太贵,虚拟和现实有gap等问题,已经是死路一条。NeRF是出路,现在的状态:
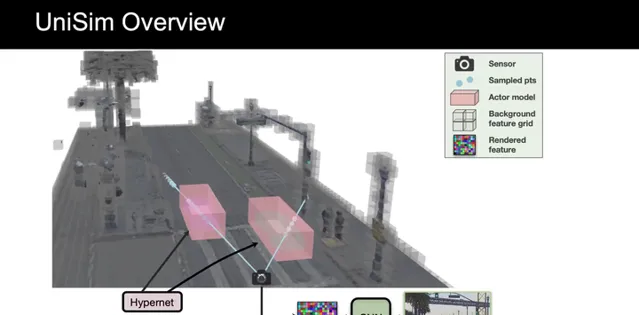
看起来挺厉害,但NeRF仍然存在无法撬动现实世界常识的问题。有没有所谓大规模预训练的NeRF?能让NeRF有一些先验的常识,哪怕他产生幻觉,也不至于想象出一些不符合常理的shi…
所以要解决闭环仿真问题一定要有一个比较好的NeRF,现在最好的NeRF也很一般,明年这方面应该会有大突破!











