导语: 广东将进入今年以来最强「泼水模式」,5月11日,珠海市香洲区城市阳台发生大面积水浸,地面全部被积水覆盖,只有露天桌椅露出水面,水面上还漂浮着杂物。
近些年,随着自然灾害的频繁发生,水面垃圾污染情况逐渐加剧。在暴雨、洪灾后,通过人为打捞,清理垃圾的效率非常低,而且运行成本高,劳动强度较大,人身安全也没有保证。在智能化装备的不断发展下,水面垃圾清理机器人应运而生。

水面垃圾清理工具几经变迁
进入21世纪以来我国水域污染日益严重。水域垃圾是水体污染的重要来源之一,其打破了水域生态系统的平衡、严重危害了居民的健康及对航道大坝运营产生了巨大威胁。国家也重视水资源维护、饮水安全及可持续发展的相关政策及措施。
同时,快速的城市化、工业化进程、旅游业发展及民众环保意识淡薄等因素导致了污染问题日益严峻,也使得江河、湖泊、港口甚至近海的水面漂浮垃圾的污染日益严重,尤其是流经城镇生活区域的河流段。大量的水面垃圾污染,不仅破坏生活水源,也影响市容环境,其污染治理及控制亟待加强。

目前水面垃圾大多采用人工打捞方式,这种方式打捞效率低、成本高、受限因素多、劳动强度大、易发生意外事故。根据调查数据显示,景区内的人工湖泊或水坝等水域需要定期进行水面垃圾清理,以免垃圾的堆积导致水体污染。目前,大多数垃圾清理均采用人工打捞方式,这不仅加大了工作人员的劳动强度,而且具有一定危险性,如果打捞的垃圾体量过大会导致清洁人员跌落水中,发生意外事故。

机械制造技术进步后,国内也涌现出了大型的打捞机械船,适合在大江大河里面投入使用。但这种清洁船的成本高、体积大、人力资源消耗大且智能化程度低。市场上现有的清洁船功能单一,定位精度差;漂浮物识别率低,不能有效进行垃圾分类识别,清理装置依赖人工操作,无法进行全自动作业。

近十年随着智能制造的发展和AI技术的使用,水面垃圾清理工具又产生了新的变化,变得更加智能和全自动,大大解放了水面清洁工作者的生产力。

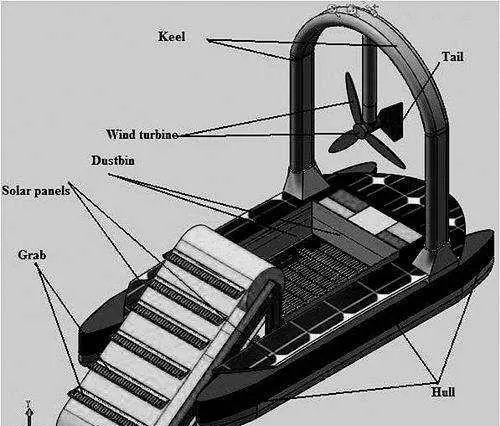
在2015年12月,中科院合肥研究院智能研究所研发出「风光互补」自助式水面机器人,这款水面自动清洁机器人由水面漂浮物自动回收装置和水面机器人组成,类似于家庭清洁机器人,主要应用于各种海洋、湖泊、河道、滩涂及景区内的湖泊、池塘的固体垃圾、浮萍等清理,以及危险区域进行远程作业,提高安全性和高效性。
不同的结构,不同的适用场景
这类机器人进行自主清洁作业,一般包括实时垃圾检测、视觉跟踪导航和动态物体抓取三大功能。可以这样考虑,一个矿泉水瓶子在水面漂浮必然是动态的,受到风向、水流流动的多元素影响,其在水面的位置也在不断的变化。而机器人,则首先需要对这些垃圾进行实时地检测,它需要知道什么是矿泉水瓶子,瓶子的位置在哪里,然后在学习智能跟踪,即实现自主导航,最后到达一定距离,则可以进行动态抓取。

图片中呈现的是抓取,抓取这个功能是它的机械结构决定的,在一些特殊水面清洁区域,这种结构是一种很好的方式,但有时大多数的环境下并不适用。因为其抓取效率较低,一个一个捕捉,甚至可能会出错,出现抓取不到的情况,毕竟水流是动态的,机器手一个抓不住就可能把瓶子推的「更远」。同时这里机器人比较小巧,倒是很适合在狭小水域,不适合大船进去的地方进行特种清洁作业,比如有放射性污染的瓶子等等。
除了这样的机械手直接进行垃圾抓取,还有一种方式就是滚动式,这是对于机械结构而言。采用具有镂空式图案的采集板,可以使得采集板与水面交接时水流能够顺利通过间隙,降低传送带运行时所产生的水流波动对于垃圾漂浮物的位置影响,从而提高垃圾收集效率,如下图所示。
这样的机械结构给了大规模智能化水面清洁的可能。下面是在2018年11月首届中国国际进口博览会,中科院合肥研究院智能机械研究所研制的智能保洁水面机器人-智能保洁1号亮相上海黄浦江,引起了广泛关注,进一步发展,就会有彻底替代人工打捞船只的可能性。

多重智能技术的相互融合协作
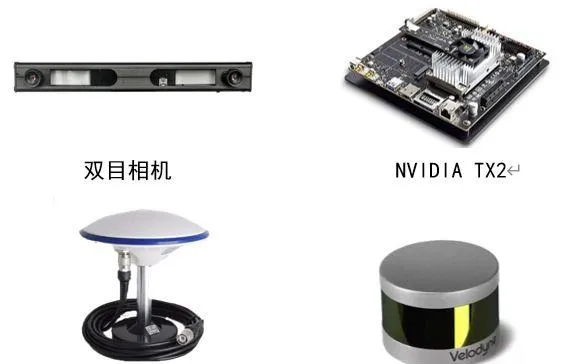
实现机器人的垃圾自主清理必须进行自主导航设计,而这第一步便是对作业区域建图及实现定位,一般机器人会搭载NVIDIA TX2、激光雷达、差分GPS、IMU、双目相机等设备,应用激光SLAM算法进行作业水域三维建图,融合IMU、差分GPS以及激光点云数据,实现船体在作业水域准确定位。差分GPS定位为厘米级精度,结合全局点云地图,利用路径规划算法计算船体最优作业路径,实现水域自主导航。
底层驱动常用差分式运动结构,这有利于船体在水域中灵活运动。底层运动控制部分以ARM 32位微处理器作为控制核心,由给定的PWM脉冲信号对推进器进行速度与方向控制。运动控制器通过串口与上位机进行数据通信,由上位机进行运动决策并发送运动指令,经底层运动解算,转化为对应PWM波并发送至对应端口,对推进器运动状态进行实时控制,从而实现底层与上层的有效统一。
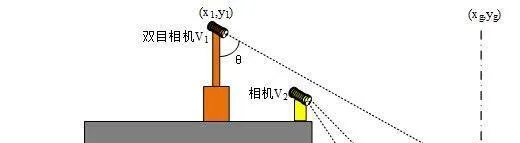
除了自主导航,垃圾的识别与分类也是重中之重。通过双目相机与激光雷达数据的融合,利用激光雷达检测不到透明物体(水)的特性,消除倒影和波纹对目标识别造成的虚警,通过水岸图像分割消除岸体对目标识别的影响。采用跟踪算法,通过目标识别的结果初始化跟踪框,然后对漂浮垃圾进行目标跟踪,提高抗干扰能力。
结语:
智能水面清洁机器人利用垃圾采集带等结构,充分的打捞水上漂浮的塑料袋、烟头、浮萍等水面垃圾,实现了垃圾清理的智能化和无人化作业。同时对漂浮垃圾进行分类、挤压、打包成块、漂浮物打捞处理工艺,实现了智能化清漂作业,极大地提高打捞效率。
在进行水面垃圾清理作业的同时,还可以通过安装小型化重金属检测仪器形成水质监测移动实验室,实现大部分水域、全天候、水质立体断面的原位和低成本实时水质监测、分析与预警。
参考文献:
[1] 廖志青,范汝健,庄宇业,莫泽生,杨国强,徐俊成.远程操控水面漂浮物清洁船的设计与应用[J].装备制造技术,2016(12):142-143+150.
[2] 「风光互补」自主式水面机器人-高智商的水面清洁工[J].传感器世界,2016,22(01):45.
[3] 王贵槐,谢朔,初秀民,洛天骄.基于深度学习的水面无人船前方船只图像识别方法[J].船舶工程,2018,40(04):19-22+99.
[4] 符文昌.鄱阳湖堤岸垃圾带垃圾分布特征及其成因分析[D].江西师范大学,2017.
[5] 李政通. 一种水面环境清洁机器人[P]. 山东:CN206840085U,2018-01-05.
[6] 林方杰.一种水面清洁机器人[P]. 安徽:CN106926985A,2017-07-07.
网易【了不起的中国制造】栏目原创内容,侵权必究
「了不起的中国制造」专栏,力邀行业权威、资深玩家,呈现他们眼中的中国创新之路。
合作邮箱:[email protected]
欢迎关注 【了不起的中国制造】 官方微博
欢迎关注 【了不起的中国制造】 网易号











