從一下幾個方面聊聊:
1 整體結構
2 關節布置
3 走線
4 密封
5 材料
1.整體結構
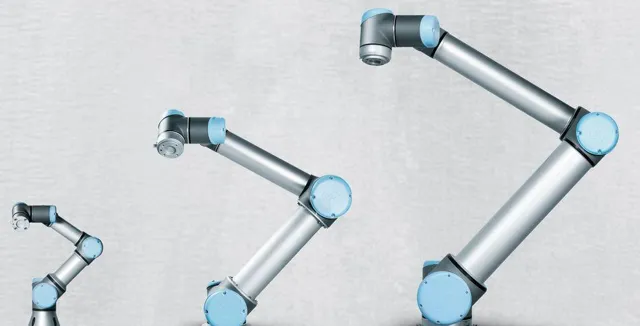
最早看到UR的機器人應該是在12年還是13年上海的工博會,當時一家代理商在靠墻的地方租了一個小櫃台,很不起眼,但是第一次看這款機器人就覺得特別奇怪,這貨不對稱啊!
四五六軸和傳統的排布不一樣,四軸與五軸相比於傳統機器人交換了位置,一軸電機倒置一軸和二軸處於同一高度,所以有較大的旋轉半徑。
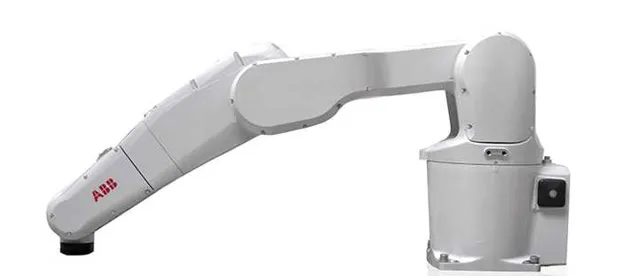
比如ABB的IRB1200,一軸電機位於二軸的下方。四軸和六軸電機可以共線。當然1200所選的電機功率遠大於UR5,所以尺寸也大一圈,二者定位不一樣。
UR的關節采用模組化設計,凡是模組化設計則必然會在效能上有所犧牲,帶來的受益則是更少的備件,更低的采購價格等等。對於人機協作類的機器人,其速度加速度效能本身就是受到限制的,所以犧牲一些效能並沒有太大的關系。而反觀工業機器人IRB1200,為了追求速度和加速度的極致,每一個尺寸,每一個關節的電機都要追求效率最大。
2 關節布置
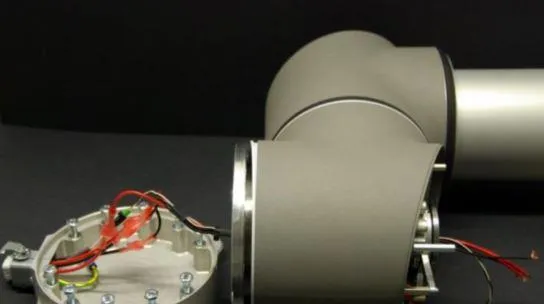
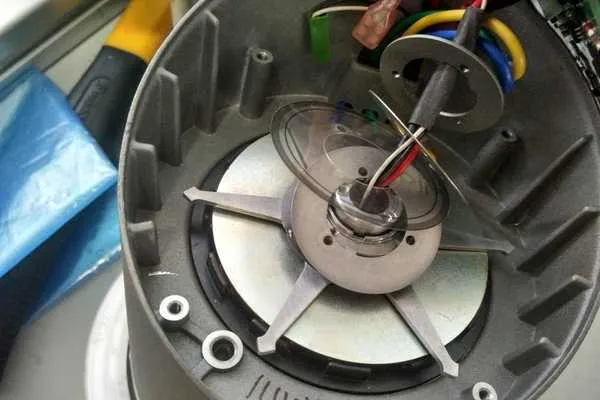
電機為科爾摩根的訂制中空電機,定子為直接鑄造為關節,除了幾位說的節省空間外,還有個好處是便於散熱,要知道電機的效能極限就在發熱上了,如果誰能來一套水冷系統,電機超頻妥妥的。盜用@
fly qq邱博一張圖
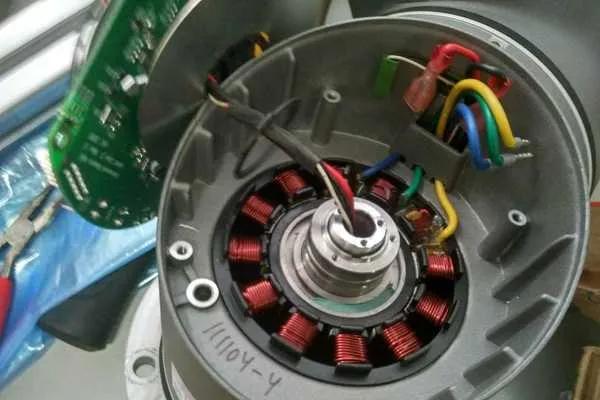
關於電機,有人說這是直流電機,有人說這是交流電機,其實都沒錯啦,如果從進線的角度來看,母線進的是直流電,如果從電機的結構上來看,其實和交流電機沒有差別。這種中空的電機也會有一點缺憾,因此是傳統機器人不用的原因,就是轉動慣量會更大,但是UR嘛,協作機器人,效能可以犧牲點。
不管是UR,還是iiwa,接到墻上的總歸是220VAC或者110VAC吧,交流變直流降壓這件事還是要做的。UR把驅動器放到關節裏了,一方面可以節省走線,另一方面母線電壓低也是有好處的,比如安全,像UL1740裏面就規定了絕緣耐壓要達到使用電壓的2倍再多一點,48V的兩倍也不多麽。
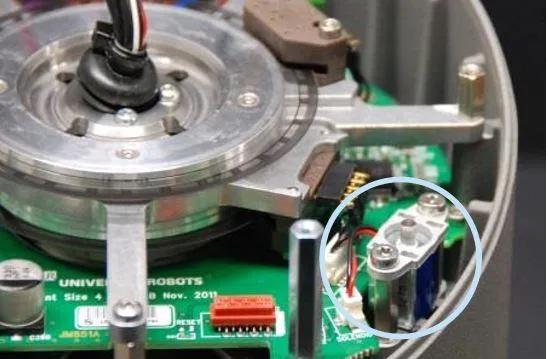
剎車UR選擇了用一個電磁鐵加一個鈑金式的簡單結構,這是一個省錢的方案,傳統工業機器人,通常對剎車有比較高的響應,壽命,摩擦力要求。對於大負載的機器人,剎車是安全的保證,在出現意外緊急停止的時候,剎車是最後一道防線,不容有失。
再盜@
fly qq邱博的一張圖,邱博回頭支付寶發我,我給你打錢哈。下圖中的這個六個腿的鈑金就是剎車盤,有一個電磁鐵不用的時候就插在兩條腿之間,機器人運動的時候,電磁鐵就收起來。六腿鈑金是跟著電機軸一起運動的。這種剎車也有一個好處,散熱好。
傳統機器人的剎車如下圖,中間是鍵槽,電機軸從中間穿過。兩個環之間是摩擦片,工作的時候,摩擦片松開,電機軸可以運轉。這種剎車響應快,位置準,發熱大........

使用這種六爪的剎車,對編碼器也是有要求的。通常編碼器有兩大類,旋變和碼盤。
旋變相當於幾個線圈,透過線圈檢測電機軸的位置,發出的訊號為模擬量。碼盤則是日本人用的比較多的東東,所發出的訊號為數位量。碼盤又分相對編碼器,絕對式編碼器。絕對式編碼器,又分單圈絕對式和多圈絕對式。UR由於剎車並不是固定的,所以使用的是絕對式編碼器。
減速器選的是HD,但具體是德國HD還是日本HD就不太清楚了。減速器也是中空的方案,畢竟走線方便。和中空電機一樣的,中空減速器價格會貴很多,轉動慣量也會變大。這方面沒有太多可說的,畢竟HD是主流,spinia和leaddrive市場份額都不大。
3 走線
走線算是亮點吧,中空走線在工業機器人上也比較常見,比如Fanuc就很喜歡用中空齒輪箱+電機偏置的方案。比如下面這幾款,在多個關節使用了中空減速器。很有意思。但是電機中空的還是不多見。

為什麽要中空走線呢?主要還是壽命問題,線纜在運動的時候需要有足夠的空間,畢竟線的本質是銅絲。中空的走線在運動的時候是扭轉運動,因此有比較好的壽命。如果你拆開一根電纜看看,你會發現銅絲本身都是扭在一起的。上圖中間這款大機器人側面的線纜,就是典型的機器人走線形式,線纜在運動的時候承受彎曲,關節的工作空間也受限制。
因為用了匯流排形式,以及驅動器放在關節,同時由於沒有內建的氣管,整個線纜的數量也非常省。
4 密封
固定密封采用一種很細的o型圈
旋轉密封貌似也是用一種彈性的圈,而非骨架油封之類的大尺寸。密封等級因此不會太高。

5 材料
材料選擇的是鋁鑄造件,從壁厚來看有可能選擇的壓鑄鋁,目前的版本中也並未使用鋁型材。鋁型材其實是個好東西,家裏的門窗就是鋁型材的。機器上,比如epson 的ls6使用的也是鋁型材做結構件。

鋁鑄件基本上是中小型工業機器人常用的材料,結構上可以任意設計,只要能脫模就好。大型電腦器人和廉價機器人材料另說。
由於手頭沒有現成的UR可拆,以上資訊基本來自於網路和手冊,如有描述不準確的地方還請見諒。
------------------------------------------------
關於評論中問題的討論:
by 張昱:減速機用的是德國HD
by 黃宇:請問為什麽六爪的剎車對編碼器有特殊要求?
由於這種剎車不能把電機完全抱死,會在60度範圍內活動。因此斷電後機器人只能記住斷電前的位置。
如果是相對式編碼器,再開機前需要找一下初始位置,比較麻煩。
如果是單圈絕對式編碼器,成本並不會太高,但是即使斷電也不會丟位置。
所以推測是單圈絕對式編碼器。
By 張偉:其實吧,舊的ur關節側用的多z的增量編碼器,可看作偽絕對的,新的ur改用了雷尼紹的磁式19bits單圈絕對編碼器。










