我幾年前曾經考慮過開發無人機探測系統,可以回答一下答主的幾個問題。
首先一些進攻性無人機是沒有控制訊號的,根據預設的地點自己飛過去,或者反放射線無人機根據雷達作為目標飛過去,並不需要人控制。大部份此類進攻性無人機沒有發射訊號的需求,自然難以作為地面防空的制導方式。
制導方式都行不通,後面幾種題主的思考,在現有武器中也各自有原型。比如兩次助推流程可以參考軍艦垂發系統的冷發射,個人飛彈的發射也基本都是類似的方式,哪怕RPG這麽簡陋也如此。
針對小無人機的打擊,最困難的一步是探測,這一點其他答主也提到了。首先這類輕小無人機的外殼就不是金屬,比較小的外殼用工程塑膠,稍大的用玻璃纖維。相當一部份甚至不會用碳纖維結構件。這樣的整個無人機,哪怕是伊朗的小摩托,在雷達上的目標也是非常小的,比各種五代戰鬥機還小。加上飛的低,雷達想要探測到這些輕小無人機是非常困難的。
現在烏克蘭對此類無人機的防範方式,我猜測是在重要目標附近的空地上設伏,在無人機飛到防空系統那個很小的探測區域裏時才能被探測到並打擊。當然,跟傳統防空十防九空一樣,這種方法比如漏掉不少無人機。此類攻擊無人機的飛行路徑是可以提前規劃一個復雜的路線,發射地點也不確定,所以並不是在發射地和目標的連線上設伏就行的。
以這些自殺無人機/巡飛彈的攻擊方式,想用常用的,基於雷達的防空系統實作一個半徑5公裏的防禦區域都有相當的困難。所以想做防空確實很難。相信未來幾年,世界各地的戰場都會大量使用自殺無人機,這東西的技術難度之低,使得很多國家都有研發出來的能力。
我幾年前的探索,是基於聲音的。一戰和二戰期間,一些國家就有基於聲音探測敵方飛機的玩法。

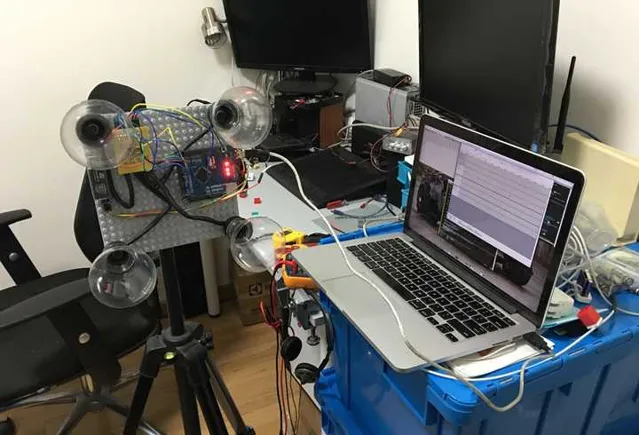
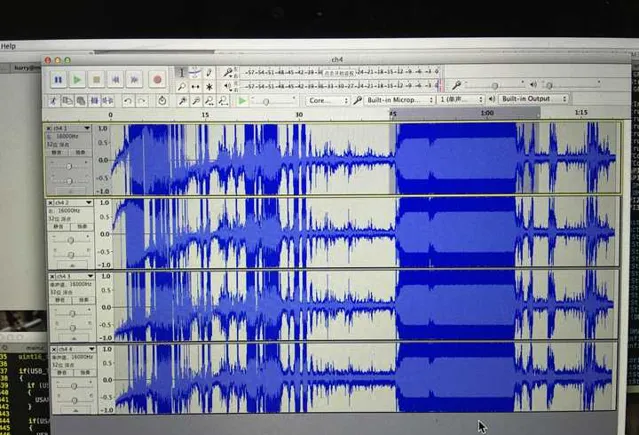
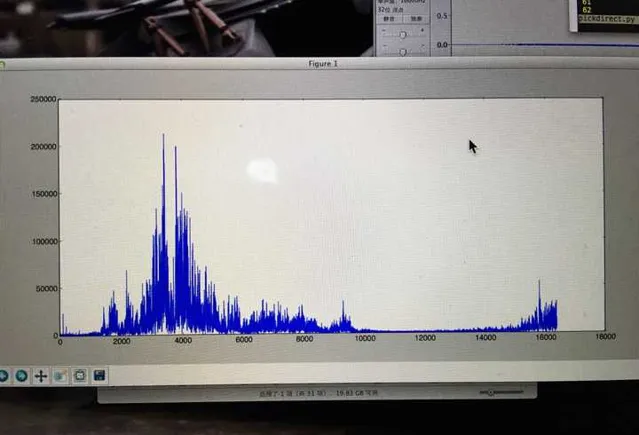
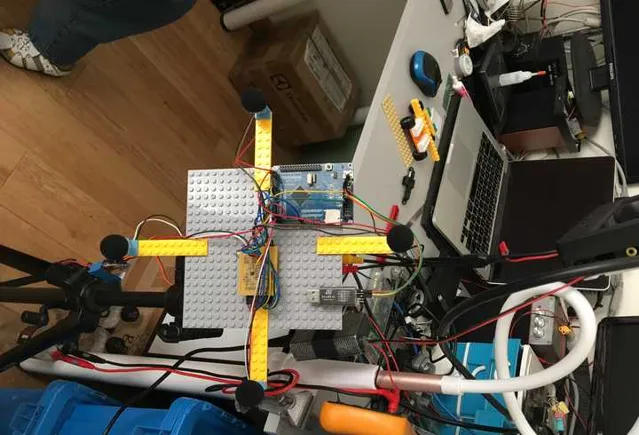
我的方案是透過麥克風矩陣,獲得螺旋槳聲音的相位,並控制雲台對準無人機的方向,剩下的交給長焦鏡頭和電腦視覺。具體來說,4個麥克風,透過2個I2S的高精度音訊ADC完成無相位損失的聲音采集,然後電腦上FFT來獲得聲音的頻率和相位。頻率用來篩選螺旋槳特征,相位用基於各個頻段投票來篩選出螺旋槳方向的實際相位差。
做了一些外場測試,重量1kg的四軸飛行器,飛行功率在150-200W。其聲音可以在150公尺的水平距離探測到。相信增大喇叭口就可以繼續提高一些探測距離。

只是透過聲音相位能獲得的角分辨率不咋樣,我當時對螺旋槳聲音的探測能做到10-15度。後來幾年語音助手興起,我看了一些研究成果,針對車喇叭一類頻率固定的目標能做到5度甚至更好的角分辨率。
期間我也嘗試擴大baseline來提升角分辨率,振幅不大,效果也不明顯。
可惜的是,跟我眾多個人愛好計畫一樣,爛尾了,……











