謝邀。
看到這麽多人關註這個問題非常驚奇,看到很多人在回答裏提到DJI也非常驚奇。作為DJI員工、機器人和無人機行業的從業人員,把在知乎上第一個正經的回答給這個問題了。
本文的目的如下:
1. 介紹什麽是無人機
2. 介紹四軸飛行器的歷史
3. 介紹民用四軸飛行器市場的目前狀況
4. 回答題主的問題
並且字裏行間給DJI打廣告……
1.
樓上各位目測都不是研究機器人的,而且確實我也發現國內目前正兒八經研究機器人、無人機並且還能活躍地上閘道器註前沿動向、熱愛寫科普文章的研究人員真心不多。因此所有回答裏沒有人真正說明白無人機是什麽,而理解無人機是什麽是回答這個問題的先決條件。
首先,無人機就是不載人的飛行器,而說到飛行器,通常我們把飛行器分為三類(我就不上圖了,願意了解可以自己百度或者google):
1) 固定翼(fixed wing) 。平時坐的波音747空客380,還有F-16殲-15之類的都是固定翼飛機。顧名思義就是翅膀形狀固定,靠流過機翼的風提供升力。動力系統包括槳和助推發動機。固定翼根據機翼尺寸的不同還有很多小的分類,在此不細說。固定翼飛行器的優點是在三類飛行器裏續航時間最長、飛行效率最高、載荷最大,缺點是起飛的時候必須要助跑,降落的時候必須要滑行。
2) 直升機(helicopter) 。特點是靠一個或者兩個主旋翼提供升力。如果只有一個主旋翼的話,還必須要有一個小的尾翼抵消主旋翼產生的自旋力。為了能往前後左右飛,主旋翼有極其復雜的機械結構,透過控制旋翼槳面的變化來調整升力的方向。動力系統包括發動機、整套復雜的槳調節系統、槳。直升機的優點是可以垂直起降,續航時間比較中庸,載荷也比較中庸。缺點是極其復雜的機械結構導致了比較高的維護成本。
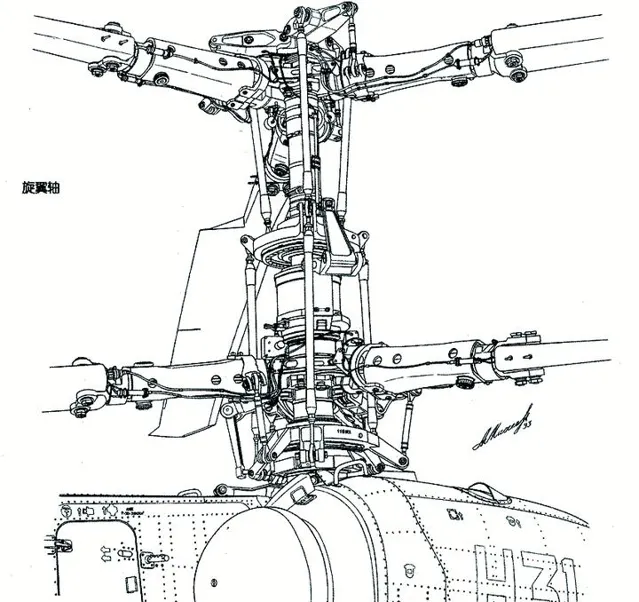
3) 多旋翼(multi-rotor) 。四個或者更多個旋翼的直升機,也能垂直起降,但是通常只有直升機叫直升機,多旋翼就叫多旋翼,而不叫多旋翼直升機。四旋翼特別叫做quadrotor。多旋翼機械結構非常簡單,動力系統只需要電機直接連槳就行。下圖是直升機的動力系統結構,再下圖是多旋翼的動力系統結構。不懂機械的人也能看出多旋翼簡單得多。多旋翼的優點是機械簡單,能垂直起降,缺點是續航時間最短,載荷也最小。

上文談到了三種飛行器外形和續航時間的不同點,這裏要再說一些更理論的不同之處。
首先, 固定翼是自穩定系統 ,簡單說就是固定翼飛上天、助推發動機穩定工作之後,不需要怎麽控制,固定翼就能自己抵抗氣流的幹擾保持穩定(當然也有蛋疼的人設計不穩定的固定翼,這比較小眾我們可以暫時忽略……)。此外對於飛行器姿態控制來說, 固定翼是完整驅動系統 ,意思是它在任何姿態下可以調整到任何姿態,並且保持住這個姿態(當然失速的時候不可以,但是失速是特殊情況,我們也可以忽略……)。
其次, 直升機是不穩定系統 ,飛上天之後如果不施加控制,一飆風吹來就翻了。不過還好的是, 直升機也是完整驅動系統 ,可以自由調整姿態。這是因為直升機的槳面不但可以產生相對機身向上的推力,也可以產生相對機身向下的推力。而且直升機沒有失速的問題,什麽時候都能調整姿態,可以在天上如散步一般自由運動。所以直升機雖然不穩定、很難控制好,但是姿態翻了的時候完全可以控制回到正常的姿態。
最後,看官們可能猜到了, 多旋翼是不穩定系統,也不是完整驅動系統(或者叫欠驅動系統) 。它的槳只能產生相對機身向上的升力。所以它不穩定、很難控制好,飛行器翻過來之後基本沒辦法控制回來,就墜機了。
2.
因為上述飛行器作為系統有穩定不穩定、驅動完整不完整的區別,所以固定翼和直升機讓人控制難度相對不高;多旋翼讓人來控制難度相對高,最好有自動控制器來控制飛行器的姿態。對於自動控制器,固定翼的自動控制器比較好做,直升機和多旋翼的自動控制器比較難做。讓事情更加難辦的是,飛行器自動控制器通常需要慣性導航系統獲取自身的姿態,而在20世紀90年代之前,慣性導航系統一般是十幾公斤的大鐵疙瘩。為了把這麽重的東西放到一個多旋翼飛行器上,飛行器的載荷必須很大,可是人們發現,不管是用油機還是電機做多旋翼飛行器的動力系統,都很難得到足夠的載荷。同時,因為固定翼和直升機已經很夠實際使用了,所以沒有人願意多花功夫去研究多旋翼飛行器這個棘手的問題。很長一段時間裏,只有美國一些研發性的計畫做出了多旋翼飛行器的樣機。
20世紀90年代之後,隨著微機電系統(MEMS)研究的成熟,幾克重的MEMS慣性導航系統被制作了出來,使得多旋翼飛行器的自動控制器可以做了。但是MEMS傳感器數據噪音很大,不能直接讀出來用,於是人們又花了一些年的時間研究MEMS去雜訊的各種數學演算法。這些演算法以及自動控制器本身通常需要速度比較快的微控制器來執行,於是人們又等了一些年時間,等速度比較快的微控制器誕生。接著人們再花了若幹年的時間理解多旋翼飛行器的非線性系統結構,給它建模、設計控制演算法、實作控制演算法。
因此,直到2005年左右,真正穩定的多旋翼無人機自動控制器才被制作出來。之前一直被各種技術瓶頸限制住的多旋翼飛行器系統突然出現在人們視野中,大家驚奇地發現居然有這樣一種小巧、穩定、可垂直起降、機械結構簡單的飛行器存在。一時間研究者趨之若鶩,紛紛開始多旋翼飛行器的研發和使用。
四旋翼飛行器是多旋翼飛行器中最簡單最流行的一種。如上所述,最初的一段時間主要是學術研究人員研究四旋翼。四旋翼飛行器最早出現在公眾視野可能要追溯到2009年的著名印度電影【三傻】…… 2010年,法國Parrot公司釋出了世界上首款流行的四旋翼飛行器AR.Drone。作為一個高科技玩具,它的效能非常優秀:輕便、靈活、安全、控制簡單,還能透過傳感器懸停,用WIFI傳送相機影像到手機上。
AR.Drone的流行讓四旋翼飛行器開始廣泛進入人類社會。在玩具這個尺寸上,多旋翼飛行器的優勢就顯示出來了,同尺寸的固定翼基本飛不起來,而同尺寸的直升機因為機械結構復雜,根本沒法低成本地制作出穩定的產品。
2012年2月,賓夕法尼亞大學的Vijay Kumar教授在TED上做出了四旋翼飛行器發展歷史上裏程碑式的演講。這一場充滿數學公式的演講居然大受歡迎,迄今已經有三百多萬次觀看,是TED成百上千個演講中瀏覽量最高的演講之一。
自此之後,四旋翼飛行器受到的關註度迅速提升,成為了新的商業焦點。
3.
談論四旋翼飛行器的市場,我們應該先談論DJI。
DJI專註在直升機自動控制器上。不過在2010年,AR.Drone的成功讓DJI也開始考慮四旋翼飛行器產品。2012年DJI相繼推出了風火輪系列四旋翼機架、悟空四旋翼飛控和S800六旋翼飛行器。當時,在AR.Drone的引領下,全球範圍內都有一股將四旋翼商業化的熱潮,DJI只是眾多小四旋翼公司中稍微出眾的一個。
當新技術產生的時候,人們總是充滿希望用這些技術趕快賺錢,但是很多技術如果找不到合適的套用,就會流於衰敗的命運。2012年的時候,研發四旋翼產品的人們在熱情之余也存有一絲迷茫:四旋翼飛行器是很好玩,但是它除了作為玩具之外,還有什麽價值呢?就像AR.Drone被定義成玩具一樣,DJI最早的多旋翼產品也被人定義成玩具、航模。2012年底的時候,我碰到一個天使投資人,他直言自己不看好DJI這樣的玩具公司。
這個問題在2013年得到了解答。隨著DJI Phantom在2013年1月的推出,四旋翼飛行器市場的形勢發生了巨大的變化。「Phantom」在英語裏有幻影、精靈的意思,它優雅的白色流線型外形也確實配得上精靈這個稱呼。Phantom與AR.Drone一樣控制簡便,新手學習多半個小時就可以自由飛行。Phantom尺寸比AR.Drone大的多,抗風性更好,還具有內建GPS導航功能,可以在戶外很大的範圍內飛行。更重要的是,當時利用GoPro運動相機拍攝極限運動已經成為歐美國家的時尚,而Phantom提供了掛載GoPro的連線架,讓用GoPro相機的人們有了從天空向下的拍攝視角。特別地,與傳統的飛機和直升機航拍不同,多旋翼系統小巧靈活,能讓拍攝者自由地控制角度和距離。就像iPhone重新定義了手機一樣,我們也可以毫不誇張地說Phantom+GoPro重新定義了航拍,也重新定義了相機。
Phantom迅速成為了世界上銷量最大的四旋翼飛行器,每月銷量成千上萬。隨著Phantom的成功,「多旋翼航拍影像系統」成為了DJI的主要發展方向。按照多方進行的數據統計, 目前全球稱為航拍影像系統的產品中, DJI產品的銷量超過5成 ,是名符其實的行業領導者。前面有朋友說在國內大疆怎麽怎麽樣,國際怎麽怎麽樣。事實是,你覺得DJI在國內的銷量很大,但其實國內銷量差不多是國外銷量的零頭,而世界上大部份可以被DJI視為競爭對手的公司各自銷量也是DJI銷量的零頭。基本DJI是在哪裏都完爆其他公司的節奏。
其他四旋翼公司看到了DJI的成功,也開始紛紛跟進,但是持續創新的DJI始終走在他們前面。DJI很快做出了精準的相機消抖雲台,讓S800的航拍影像品質達到了電影級別,在好萊塢的電影拍攝者中建立了良好的口碑,也帶動了「航拍公司」這個產業的形成。DJI發明了四旋翼系統的黑匣子IOSD,讓飛行數據可以被記錄、分析,增加飛行的安全性。DJI開發了優秀的圖傳系統,提高了遠端即時影像傳輸的品質……2013年下半年,以「會飛的相機」為宣傳語的Phantom Vision帶著一體化的相機和改進的電池系統面世,進一步提升了航拍的體驗。
DJI優秀的marketing team借助在好萊塢的人脈迅速拓展了大量名人作為Phantom的使用者,在北美廣為人知。比如導演斯皮爾伯格也玩phantom vision,由於版權問題就不上圖了。
(另一個由董事長流傳出來的段子是:比爾蓋茲買了他的第一個iphone就是為了下載DJI的app看Phantom的相機……當然這個段子聽起來不太靠譜,難道就不能買Android麽我們也是做了Android的app的啊)
DJI Phantom受到的贊譽不能再多,我就不繼續打廣告了。各位看官所知道的許多雜誌、媒體、一些世界上知名的人物,都發表過對Phantom正面的贊揚。反而因為Phantom主打國際市場,國內報道相對比較少。
今天你拿到一架DJI Phantom的時候,要記得僅僅10年前,還沒有這樣的飛行器飛在地球上;僅僅5年前,這架飛行器上大部份的技術難關還沒有被克服;僅僅1年前,這架飛行器還不像飛機等商業飛行器一樣具有完整的安全保護和數據記錄裝置。你所拿到的,是人類二十年來在系統控制論、空氣動力學和微電子制造方面最頂尖的智慧結晶之一。不知道這麽說,會不會讓擁有Phantom的看官下次炸機的時候稍微對DJI多一點容忍……畢竟是個復雜系統,出錯不可避免。汽車發展了一百多年,偶爾熄火爆胎都是避免不了的,四旋翼只發展了幾年而已。
所以現在四旋翼飛行器的市場一部份是以AR.Drone和比他尺寸更小的玩具市場,另一部份是DJI Phantom和DJI S1000這個尺寸段的航拍飛行器市場。玩具市場暫且不說,航拍飛行器市場據分析未來幾年會發展到100億美元的規模。
4.
賈伯斯說過:「people don't know what they want until you show it to them.」 兩年前,當四旋翼無人機還處在玩具階段的時候,沒有人知道它能用來幹什麽。而現在,當成千上萬的四旋翼飛行器在我們四周盤旋的時候,成千上萬的新想法也隨之起飛了。隨著亞馬遜、DHL和順豐相繼進行多旋翼飛行器測試送快遞,隨著媒體不斷報道哪個國家的誰誰誰又用四旋翼飛行器做了啥啥啥套用,諸如送快遞、輸電路線勘測、野生動物保護、安防監控之類的想法似乎都已經不是新鮮名詞了。四旋翼飛行器的市場似乎變得很大。
人們熱切地提出各種各樣的想法。在DJI,幾乎每天都有人來找我們說你們的飛機能不能用來作啥啥啥,其中不乏一些世界500強公司的代表。大部份這些想法通常是不切實際的,因為人們通常不理解四旋翼飛行器和直升機以及固定翼的區別,不明白什麽樣的套用應該用什麽樣的飛行器,這就是為什麽開頭我要花巨大的篇幅來解釋無人機的分類。比如說,勘測稻田這個事情,顯然是固定翼更合適,因為它飛行半徑大,續航時間長。而勘測溫室裏的植物,顯然是四旋翼更合適,因為它尺寸小、靈活、運動更自由。
通常一個公司如果專註於做一類飛行器,很難快速地切換去做另一類飛行器。比如做四旋翼飛行器需要大量做控制的人才,而做固定翼需要大量懂空氣動力學的人才。同一個團隊基本不可能又能做四旋翼又能做固定翼。所以一個無人機公司如果不是非常有錢,應該專註在三種飛行器中的一種上。
好,如果還有人耐心地看到這裏的話,我終於可以回答題主的問題了。一個字,好。
套用DJI的宣傳語說:「人類對飛行的夢想是與生俱來的。」你已經看到人們的創意如何在一兩年之內被四旋翼點燃起來,想必當人們更加了解三類飛行器的優缺點之後,更多的公司進入各種飛行器行業,更多的飛行器被制造出來,更多的想法也會被創造出來,這樣更大的市場也會形成。我相信在未來的十年之內,無人機行業會逐步壯大,我們今天產生的所有想法基本都會實作,更多的想法也會逐步被實作,利用無人機的套用越來越多,無人機將會變成我們生活不可或缺的部份。
當然,三種無人機的比例會在不同時期有所不同。四旋翼市場很可能萎縮,因為它續航時間短,載重量小,還像蚊子一樣嗡嗡叫,不合適大多數我們想實作的套用。現在人們覺得可以用四旋翼送快遞或者幹這個幹那個,完全只是因為you show it to them。如果將來有人設計了一種利用固定翼送快遞的方案,顯然能送更多的東西,更省電,也更安靜,那麽很可能人們主要會研究用固定翼送快遞。人們暫時只是被成熟的四旋翼解決方案沖昏了頭腦,以為四旋翼無所不能,但這種看法是不完整的。
針對樓上朋友們談到的一些話題再說一點點:
1. 我根本沒提法律問題。因為汽車剛被發明出來的時候,有法律要求汽車速度不能超過馬車。
2. 廣告: DJI產品內建機場附近禁飛功能。
3. DJI招人要求很高……











