導語: 廣東將進入今年以來最強「潑水模式」,5月11日,珠海市香洲區城市陽台發生大面積水浸,地面全部被積水覆蓋,只有露天桌椅露出水面,水面上還漂浮著雜物。
近些年,隨著自然災害的頻繁發生,水面垃圾汙染情況逐漸加劇。在暴雨、洪災後,透過人為打撈,清理垃圾的效率非常低,而且執行成本高,勞動強度較大,人身安全也沒有保證。在智慧化裝備的不斷發展下,水面垃圾清理機器人應運而生。

水面垃圾清理工具幾經變遷
進入21世紀以來中國水域汙染日益嚴重。水域垃圾是水體汙染的重要來源之一,其打破了水域生態系的平衡、嚴重危害了居民的健康及對航道大壩營運產生了巨大威脅。國家也重視水資源維護、飲水安全及永續發展的相關政策及措施。
同時,快速的城市化、工業化行程、旅遊業發展及民眾環保意識淡薄等因素導致了汙染問題日益嚴峻,也使得江河、湖泊、港口甚至近海的水面漂浮垃圾的汙染日益嚴重,尤其是流經城鎮生活區域的河流段。大量的水面垃圾汙染,不僅破壞生活水源,也影響市容環境,其汙染治理及控制亟待加強。

目前水面垃圾大多采用人工打撈方式,這種方式打撈效率低、成本高、受限因素多、勞動強度大、易發生意外事故。根據調查數據顯示,景區內的人工湖泊或水壩等水域需要定期進行水面垃圾清理,以免垃圾的堆積導致水體汙染。目前,大多數垃圾清理均采用人工打撈方式,這不僅加大了工作人員的勞動強度,而且具有一定危險性,如果打撈的垃圾體量過大會導致清潔人員跌落水中,發生意外事故。

機械制造技術進步後,國內也湧現出了大型的打撈機械船,適合在大江大河裏面投入使用。但這種清潔船的成本高、體積大、人力資源消耗大且智慧化程度低。市場上現有的清潔船功能單一,定位精度差;漂浮物辨識率低,不能有效進行垃圾分類辨識,清理裝置依賴人工操作,無法進行全自動作業。

近十年隨著智慧制造的發展和AI技術的使用,水面垃圾清理工具又產生了新的變化,變得更加智慧和全自動,大大解放了水面清潔工作者的生產力。

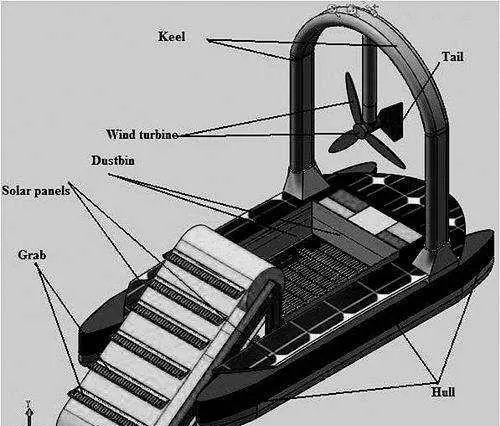
在2015年12月,中科院合肥研究院智慧研究所研發出「風光互補」自助式水面機器人,這款水面自動清潔機器人由水面漂浮物自動回收裝置和水面機器人組成,類似於家庭清潔機器人,主要套用於各種海洋、湖泊、河道、灘塗及景區內的湖泊、池塘的固體垃圾、浮萍等清理,以及危險區域進行遠端作業,提高安全性和高效性。
不同的結構,不同的適用場景
這類機器人進行自主清潔作業,一般包括即時垃圾檢測、視覺跟蹤導航和動態物體抓取三大功能。可以這樣考慮,一個礦泉水瓶子在水面漂浮必然是動態的,受到風向、水流流動的多元素影響,其在水面的位置也在不斷的變化。而機器人,則首先需要對這些垃圾進行即時地檢測,它需要知道什麽是礦泉水瓶子,瓶子的位置在哪裏,然後在學習智慧跟蹤,即實作自主導航,最後到達一定距離,則可以進行動態抓取。

圖片中呈現的是抓取,抓取這個功能是它的機械結構決定的,在一些特殊水面清潔區域,這種結構是一種很好的方式,但有時大多數的環境下並不適用。因為其抓取效率較低,一個一個捕捉,甚至可能會出錯,出現抓取不到的情況,畢竟水流是動態的,機器手一個抓不住就可能把瓶子推的「更遠」。同時這裏機器人比較小巧,倒是很適合在狹小水域,不適合大船進去的地方進行特種清潔作業,比如有放射性汙染的瓶子等等。
除了這樣的機械手直接進行垃圾抓取,還有一種方式就是捲動式,這是對於機械結構而言。采用具有鏤空式圖案的采集板,可以使得采集板與水面交接時水流能夠順利透過間隙,降低傳送帶執行時所產生的水流波動對於垃圾漂浮物的位置影響,從而提高垃圾收集效率,如下圖所示。
這樣的機械結構給了大規模智慧化水面清潔的可能。下面是在2018年11月首屆中國國際進口博覽會,中科院合肥研究院智慧機械研究所研制的智慧保潔水面機器人-智慧保潔1號亮相上海黃浦江,引起了廣泛關註,進一步發展,就會有徹底替代人工打撈船只的可能性。

多重智慧技術的相互融合協作
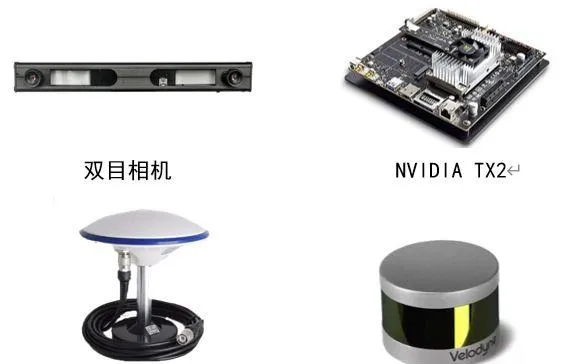
實作機器人的垃圾自主清理必須進行自主導航設計,而這第一步便是對作業區域建圖及實作定位,一般機器人會搭載NVIDIA TX2、雷射雷達、差分GPS、IMU、雙目相機等裝置,套用雷射SLAM演算法進行作業水域三維建圖,融合IMU、差分GPS以及雷射點雲數據,實作船體在作業水域準確定位。差分GPS定位為厘米級精度,結合全域點雲地圖,利用路徑規劃演算法計算船體最優作業路徑,實作水域自主導航。
底層驅動常用差分式運動結構,這有利於船體在水域中靈活運動。底層運動控制部份以ARM 32位元微處理器作為控制核心,由給定的PWM脈沖訊號對推進器進行速度與方向控制。運動控制器透過串口與上位機進行資料通訊,由上位機進行運動決策並行送運動指令,經底層運動解算,轉化為對應PWM波並行送至對應埠,對推進器運動狀態進行即時控制,從而實作底層與上層的有效統一。
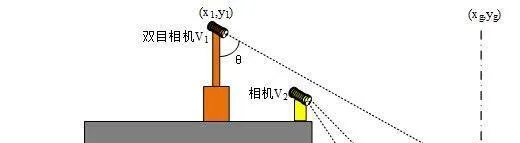
除了自主導航,垃圾的辨識與分類也是重中之重。透過雙目相機與雷射雷達數據的融合,利用雷射雷達檢測不到透明物體(水)的特性,消除倒影和波紋對目標辨識造成的虛警,透過水岸影像分割消除岸體對目標辨識的影響。采用跟蹤演算法,透過目標辨識的結果初始化跟蹤框,然後對漂浮垃圾進行目標跟蹤,提高抗幹擾能力。
結語:
智慧水面清潔機器人利用垃圾采集帶等結構,充分的打撈水上漂浮的塑膠袋、煙頭、浮萍等水面垃圾,實作了垃圾清理的智慧化和無人化作業。同時對漂浮垃圾進行分類、擠壓、打包成塊、漂浮物打撈處理工藝,實作了智慧化清漂作業,極大地提高打撈效率。
在進行水面垃圾清理作業的同時,還可以透過安裝小型化重金屬檢測儀器形成水質監測移動實驗室,實作大部份水域、全天候、水質立體斷面的原位和低成本即時水質監測、分析與預警。
參考文獻:
[1] 廖誌青,範汝健,莊宇業,莫澤生,楊國強,徐俊成.遠端操控水面漂浮物清潔船的設計與套用[J].裝備制造技術,2016(12):142-143+150.
[2] 「風光互補」自主式水面機器人-高智商的水面清潔工[J].傳感器世界,2016,22(01):45.
[3] 王貴槐,謝朔,初秀民,洛天驕.基於深度學習的水面無人船前方船只影像辨識方法[J].船舶工程,2018,40(04):19-22+99.
[4] 符文昌.鄱陽湖堤岸垃圾帶垃圾分布特征及其成因分析[D].江西師範大學,2017.
[5] 李政通. 一種水面環境清潔機器人[P]. 山東:CN206840085U,2018-01-05.
[6] 林方傑.一種水面清潔機器人[P]. 安徽:CN106926985A,2017-07-07.
網易【了不起的中國制造】欄目原創內容,侵權必究
「了不起的中國制造」專欄,力邀行業權威、資深玩家,呈現他們眼中的中國創新之路。
合作信箱:[email protected]
歡迎關註 【了不起的中國制造】 官方微博
歡迎關註 【了不起的中國制造】 網易號











