和 @D.Han 討論了一下,這個定位精度具體可能有多少不太好猜測,因為影響因素太多了,可實作的演算法也很多,而且現在衛星定位系統(Global Navigation Satellite System , GNSS)和基站定位系統其實並不獨立,我們日常使用的GPS也會有基站參與輔助定位。
註:GNSS系統以GPS系統為代表,包括北鬥等。如果一定要一個對比的話,目前5G的目標是定位精度1m左右,當前的GNSS系統精度在10cm級,具體的對比可以參見下圖 [1] :
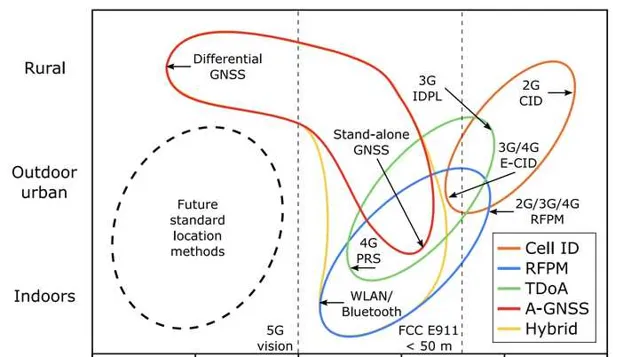
這幾種常用基站定位在鄉村(Rural)、室外(Outdoor)、室內場景(Indoor)下的對比,請重點觀察紅色圓環(代表Assisted-GNSS)與5G目標(1m的虛線)之間的對比。
通常如圖,Assisted-GNSS有兩種:
可以看到在rural場景下差分GNSS(Differential GNSS)是要遠超5G目標的,單獨的GNSS系統精度並沒有超過5G目標。
註意這裏要強調一下,5G的目標只是目標,具體實作起來依然有很多困難,大機率是不會超過GNSS系統的。我們解釋一下現存的幾種基站定位技術,首先是基礎理論:
基礎理論
定位的基本原理是透過計算測量點與多個已知節點之間的距離,來確定測量點的位置。基本要求是:
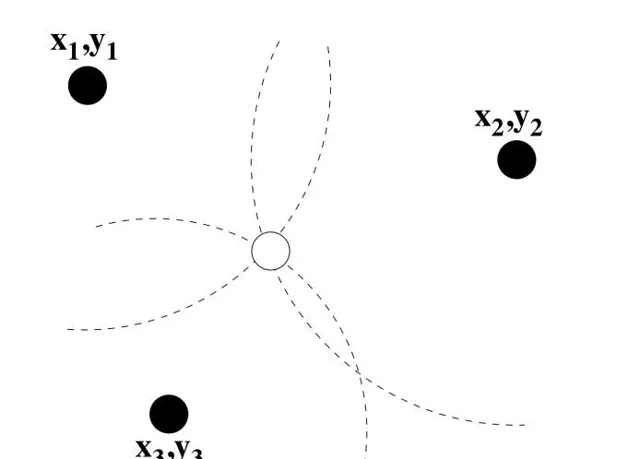
經典的三邊測量圖 [2] :
====================公式預警,不想看請跳過================
那麽假設
我們能得到這樣一個方程式組:
\begin{bmatrix} (x_1 -x)^2+(y_1 -y)^2\\ (x_2 -x)^2+(y_2 -y)^2\\ (x_3 -x)^2+(y_3 -y)^2\\ \end{bmatrix} = \begin{bmatrix} r_1^2\\ r_2^2\\ r_3^2 \end{bmatrix}
把未知數 \mathbf{x} 提取出來,可以寫成矩陣形式 \mathbf{Ax=b} , 這裏:
A=\begin{bmatrix} 2(x_3-x_1) & 2(y_3-x_1)\\ 2(x_3-x_2) & 2(y_3-x_2) \\ \end{bmatrix} , \mathbf{b}= \begin{bmatrix} r_1^2-r_3^2-x_1^2-y_1^2+x_n^2+y_n^2\\ r_2^2-r_3^2-x_2^2-y_2^2+x_n^2+y_n^2\\ \end{bmatrix}
這時候就可以采用least square estimation 來直接得到結果 \mathbf{x}=\mathbf{(A^T A)^{-1} A^T b} .
======================預警結束==============================
從上邊的假設可以看出來,我們估計測量點位置的過程中,用到了已知點與測量點之間的距離(條件3),已知點和測量點之間的座標(條件1)。很明顯,
當這些已知參考點全部是衛星時,就是 GNSS系統 ,當這些參考點全部是基站時,就是 基站定位系統 ,當這些參考點部份是衛星,部份是基站(或者是其它地面參考站)時,就是 差分GNSS 。
如果我們只談基站定位的話,就是這幾種:
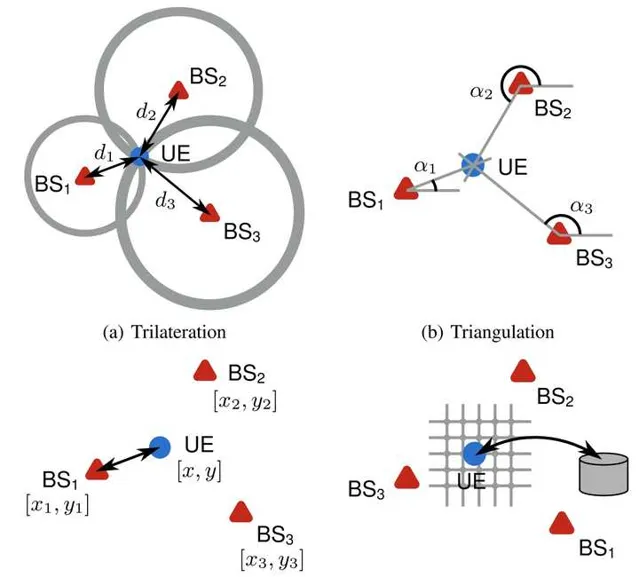
a. 三邊測量 :透過接收到的訊號來求解幾何問題,就比如我上邊列出的公式。因為基站位置都是已知的,那麽上例中的未知數只有使用者與基站之間的距離。為了求解使用者與基站之間的距離,需要訊號在空中傳播時間,也就是可能能用到幾種資訊:到達時間(time of arrival,ToA);time difference of arrival (TDoA) 或者 received signal strength (RSS)。
b. 三角測量 :當基站位置已知時,基站與使用者之間的距離資訊可以用角度資訊替代。如果我們知道訊號的到達角(angle of arrival,AoA),那麽同樣可以得到與三邊測量同樣的結果。
c. 近似 :如果我們只有一個已知基站,那麽我們可以根據ToA或者AoA和訊號強度大概估計出使用者與基站的距離和角度,那麽就可以近似出使用者位置。實際上這也是2G系統中最常見的基站定位方式。這裏的問題是,通常地面會存在很多幹擾,單個基站的估計不會很精確。
d. 場景分析 :我們可以將一些典型位置點的訊號特征(比如RSS、時延擴充套件或者通道擴充套件)存入資料庫,再與當時的訊號作比對,可以估計出使用者與基站之間的距離和方位。
當然上述幾種可以混合起來使用。
具體上述幾種方式怎麽使用,要看手機硬體怎麽實作。但是因為現在的非異構小區是單個基站服務範圍內的使用者,因此通常一個使用者很難同時收到三個基站的訊號,a,b理論上可以實作,但是很難。實際套用中我們也基本不會考慮純粹基站組成的三邊測量或者三角定位,一般只考慮單基站存在下的 近似, 透過獲取基站與使用者之間的距離和位置,作為三邊測量的輔助方式使用。
目前工程上有幾個點值得討論:
近似場景:
小區ID(Cell ID,CID):CID是 近似 方案的一種,也是目前最廣泛的基站定位方案,透過手機接入的基站ID和一些額外資訊(比如第幾磁區,和一些距離測量方案)來推斷使用者位置。根據訊號不同分為Cell ID timing advance (CID-TA) [3] 和Cell ID Round Trip Time (CID-RTT) [4] 。它的增強版是Enhanced Cell ID (E-CID) [5] ,可以聯合AoA,TA和訊號強度等資訊推斷使用者位置。
訊號指紋(fingerprinting 或者叫 RF Pattern Matching, RFPM): RFPM是另外一種使用最廣泛的 近似 方案,通常來說,一個使用者的位置會與某個訊號測量值匹配,比如是某個特定的參考訊號強度。那麽可以把當前使用者的訊號特征與資料庫做比對,就可以得到使用者的大概位置。目前在2G GSM, 3G UMTS, 4G LTE-A中都有實作。預計5G中依然會采用。
三邊測量:
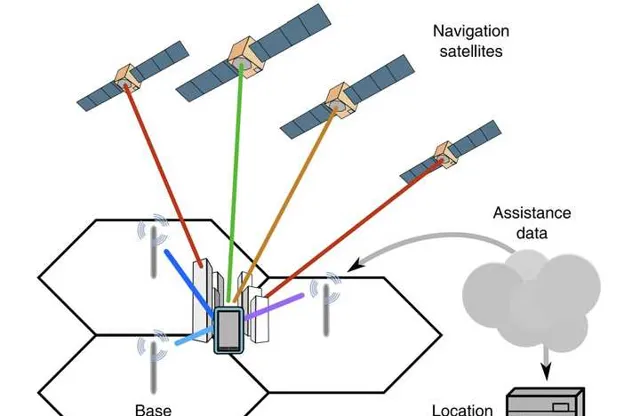
Assisted GNSS:正如之前所說,基站定位想要采用更精確的三邊測量或者三角定位,現有的非異構網路系統很難找到足夠的地面基站,因此在這種情況下,通常會采用基站+3~6個衛星同時定位的方式, 這種情況稱為A-GNSS,也是目前我們手機裏預設的定位方式 。同樣,會在2,3,4,5G中都采用。這種情況下,我們可能不能簡單的單獨比較定位衛星或者基站定位的優劣。
三邊測量或者近似,場景分析中的通用資訊:
到達時間(Time of Arrival, ToA):到達時間估計其實是 三邊測量、近似、場景分析 中都需要的特性,主要用以計算使用者和基站之間的距離。目前也有很多變種,比如Uplink ToA [6] ,Uplink TDoA [5] ,Enhanced Observed Time Difference(E-OTD)。這同樣是2,3,4,5G中都會用的技術,正如 @D.Han 所說,5G會因為更短的時間同步精度,在計算ToA上更加精確。
5G可能引入的新趨勢
其實改進基站定位系統不是5G的高優先級議題,因為定位不是通訊系統的主要功能,新的技術可能會帶來更多例如室內定位套用。
公釐波: 5G中的公釐波會因為其高指向性和LOS場景特性,會更容易估計AoA,所以可以提升基站定位精度。
超密集組網和異構 :5G會采用多種頻率同時覆蓋,因此使用者可能能夠同時連入更多參考基站。
多徑輔助定位(Multipath-Assisted Location) :補充一下,看到有提到多徑,多徑,小區間幹擾,時鐘/載波同步和覆蓋是影響基站定位的幾種關鍵因素。但是其中多徑效應不僅僅是影響,也能輔助定位。我在這裏做點補充。透過一些訊號追蹤演算法 [7] ,多徑部份可以被當做來自一個或者多個虛擬的訊號源(散射點),這種情況下,多徑效應可以用來作為室內定位提高精度的一種新技術 [8] [9] 。
原理大概是這樣,5G可能會因為上述特性得到增強,但是個人感覺並不會很多,這裏的結論已經在開頭講了。
謝謝。
參考
- ^ del Peral-Rosado J A, Raulefs R, López-Salcedo J A, et al. Survey of cellular mobile radio localization methods: From 1G to 5G[J]. IEEE Communications Surveys & Tutorials, 2018, 20(2): 1124-1148.
- ^ Dargie W, Poellabauer C. Fundamentals of wireless sensor networks: theory and practice[M]. John Wiley & Sons, 2010.
- ^ 「Location services (LCS); functional description; stage 2, release 98, V7.0.0,」 3GPP, Sophia Antipolis, France, Rep. 3GPP TS 03.71, Jun. 1999.
- ^ 「Stage 2 functional specification of user equipment (UE) positioning in UTRAN, release 99, V3.0.0,」 3GPP, Sophia Antipolis, France, Rep. 3GPP TS 25.305, Dec. 1999.
- ^ a b 「Stage 2 functional specification of UE positioning in E-UTRAN, release 9, V9.10.0,」 3GPP, Sophia Antipolis, France, Rep. 3GPP TS 36.305, Jan. 2013.
- ^ Y. Zhao, 「Mobile phone location determination and its impact on intelligent transportation systems,」 IEEE Trans. Intell. Transp. Syst., vol. 1, no. 1, pp. 55–64, Mar. 2000
- ^ K. Witrisal, S. Hinteregger, J. Kulmer, E. Leitinger, and P. Meissner, 「High-accuracy positioning for indoor applications: RFID, UWB, 5G, and beyond,」 in Proc. IEEE Int. Conf. RFID, Orlando, FL, USA, May 2016, pp. 1–7.
- ^ K. Witrisal et al., 「High-accuracy localization for assisted living: 5G systems will turn multipath channels from foe to friend,」 IEEE Signal Process. Mag., vol. 33, no. 2, pp. 59–70, Mar. 2016
- ^ C. Gentner et al., 「Multipath assisted positioning with simultaneous localization and mapping,」 IEEE Trans. Wireless Commun., vol. 15, no. 9, pp. 6104–6117, Sep. 2016.










