基於單目的深度估計只利用一個視點的視訊序列和影像進行深度估計,具有價格低廉,獲取資訊內容豐富,傳感器體積小等優勢。與多目相比,單目的情形最貼近實際的套用需求,因為絕大多數套用場景只有一個視點,也是目前深度估計領域的研究熱點。
目前,基於深度學習的單目深度估計方法已經有了很好的效果,包括在自動駕駛數據集KITTI上的效能也有很大突破,比如Monodeptp:

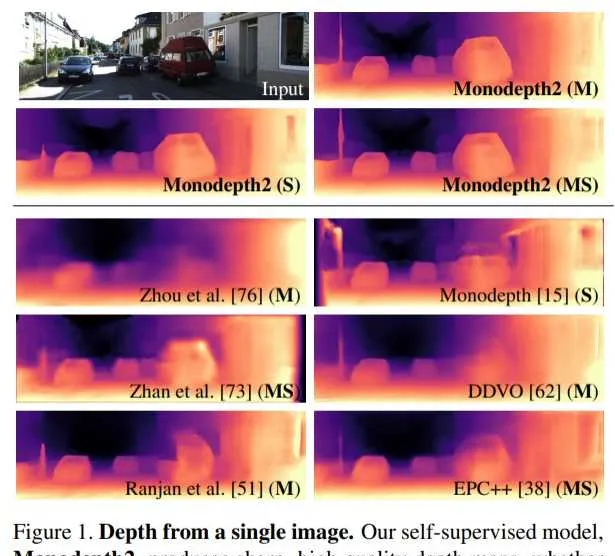
同時,無監督、自監督方法的效能也已經達到了一定的水平,無監督方法只需要利用視訊就可以訓練單目深度估計網路,這就使得數據集獲取更加容易,不用依賴深度的真值。隨時都可以利用新的場景數據訓練模型,真正做到數據驅動的自動駕駛系統。
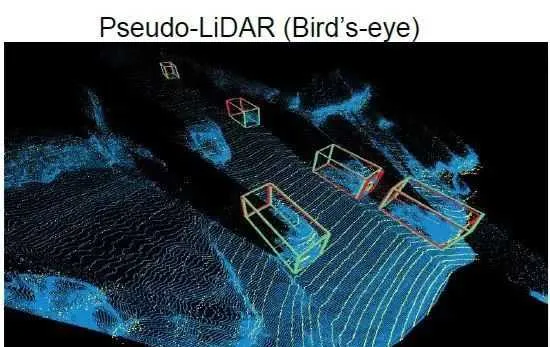
在具體套用上,單目深度估計可以用來生成稠密的偽雷射點雲,做單目3D的目標檢測,會比直接用影像做單目3D檢測的準確率更高。而且,深度圖貼上顏色紋理資訊還可以用來做三維重建,用來更好的感知障礙物和周圍環境。

所以,我很看好單目深度估計在自動駕駛領域的套用前景。
最後,給大家推薦一個單目深度估計的課程:https://www. zhihu.com/question/4331 33870/answer/2185163289
課程亮點
1. 深入淺出,循序漸進,為你從理論到實戰逐個攻破;
2. 講師多年的工程經驗傾情奉獻,數據、源碼開源幫助你更好地理解每處細節;
3. 理論結合實踐,課時結束後布置練習計畫,答疑群內,講師和你線上交流遇到的難題;
4. 優質的學習圈子,你可以和來自清華大學、慕尼黑工業大學,上海交通大學、南京大學、華中科技大學、西北工業大學等高校學子一起討論學習,你踩過的坑他們大機率也踩過;
5. 真正能面向工業落地的內容分享;
學習入口:
單目深度估計方法:演算法梳理與程式碼實作










