作为一个智能清洁工具爱好者,用过各种扫地机,拖地机,洗地机,电动拖把等等 。如果单纯就拖地来说,我更建议入手一个专业的拖地机,拖的干净的同时也能解放双手,还是很不错的。
比如我近期入手的这台通过堆叠拖布这种简单有有效的方式设计的小章鱼拖地机,就是不很不错的一个选择

开箱

这台拖地机器人的包装是很传统的纸箱结构,里面的主机与基站采用上下堆叠的包装方式,机器的上中下都垫有回收废纸制造的减震包装垫,既安全又环保。
这台拖地机器人的包装是很传统的纸箱结构,里面的主机与基站采用上下堆叠的包装方式,机器的上中下都垫有回收废纸制造的减震包装垫,既安全又环保。

基站的造型非常的圆润,表面的光泽度也很高。看起来就像一颗光滑的白色鹅卵石。这种柔和曲线的造型设计很容易给人一种亲近感,也就是常说的萌感。

从正投和侧投方向来看,整台的圆润感就更加的强烈了。基站和主机都采用了黑白撞色的设计,机身正面那个大大的黑色360LOGO给人一种画龙点睛的感觉。
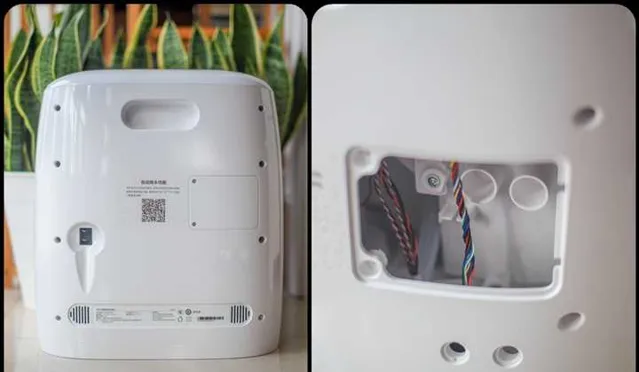
基站背部设计略显复杂,提手、电源插口都是常规设计,机身底部设计有左右两个出风口,这是拖布烘干装置的出风口。最值得一提的是位于机背中间右侧的这个盖子,它是选装自动上下水装置的接口,如果家里装修时为扫地机预装了上下水,以后的生活就轻松多了。
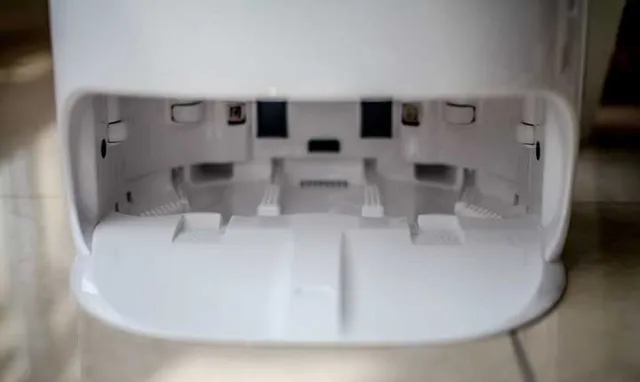
基站的正面则相对常见,从主机舱的开口处可以看到里面的导向轮,充电接头、喷水孔、抽水口等扫地机的常见部件。比较特别的是它的拖布清洗刮板有四个,以对应主机上的4个拖布。

基站内部的污水箱和净水箱无论从结构上还是位置上,都与主流扫地机器人完全一致,就连取出方式都一模一样。

3.5升的污水箱和4升清水箱容量挺大,据官方数据能够支持主机连续清洗约200平米的面积。水箱的材质不是其他品牌喜欢用的那种透明的PC塑料,而是略有韧性的磨砂塑料,感觉上似乎要更结实一些。

值得表扬的是净水箱顶部的这个凹陷设计,在加水的时候无需担心对不准加水口导致清水外溢。
主机

小章鱼K7的主机采用了通用的圆形设计,从外观上看与普通的扫地机器人无甚区别,唯一特别的地方就是顶部中央的那个360logo。

顶部的这个位置看起来很像采用了视频导航器件的样子,但其实它就是一个LOGO+状态指示灯而已,上面的两个按键分别是回充和电源开关,当然,在当前APP技术非常成熟的环境下,能用到这两个按键的概率其实非常低。
小章鱼的机身底部,也是它最为独特的地方,4个圆形的拖布沿着尾部顺序排开,拖布之间互相重叠,没有清扫间隙,它的左右两端甚至还超出的机身宽度,在进行沿边清扫时就具备先天优势,绝对不会留有清扫死角。
从这张图片还能看到机身底部的4个悬崖传感器和导向轮旁边的地毯传感器,作为一台专业的拖地机,遇到地毯自然是走为上计。

四个地拖的旋转方向如上图,每分钟200转的清洁速度可以对地面进行有效清理,清理完成后的还能根据拖布的脏污程度,智能选择200、370、550这三档转速进行甩干。

相信大家早就发现了,小章鱼K7的顶部并没有凸起的LDS激光扫描雷达,但它确实是实实在在的激光导航机型。这其中的奥秘就隐藏在机身跑道形的大开口里。这是360独门的隐藏式激光雷达设计,由于取消了机顶雷达,整机高度下降到了7.9CM,这几乎是市面上身高最低的拖地机器人,进入低矮空间的能力非常强。

激光雷达下面的AI-LIFE字样,表明它应用了360无人驾驶大脑6.0版本,据厂家资料说,这个版本是专为拖地机器人优化研发的定制算法,具有更有效的拖地效率,如由远及近拖地,近距离贴墙、零距离绕障等特性。旁边的黑色椭圆形是机器的回充传感器,主要用于回充时与基站互相联系使用。

机身侧面的黑孔,也是基站传感器,用于回充时侧向对准基站使用,它也是整台机器导航系统的一个重要组成部分。

这就是小章鱼K7的后部了,也是这篇文章的题图。它看起来是不是很像一个活灵活现的章鱼。
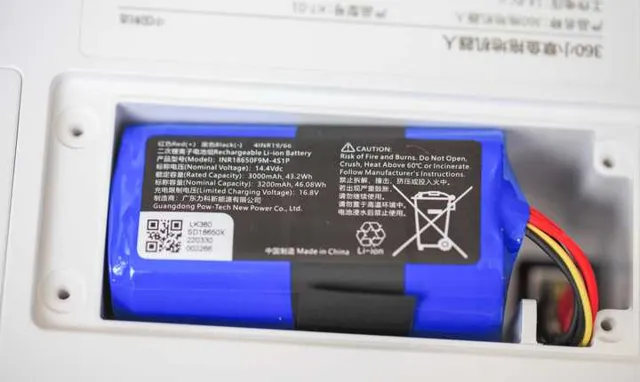
小章鱼K7另一个值得称道的地方是它的电池仓采用了可更换设计,拧下四颗螺丝就能轻松的更换电池。从标签上可以看到这块广东力科出品的3000mAH锂电池体积并不大,考虑到作为一台专业的拖地机器人,这个容量应该是非常充足的,经过实测,它能够支持机器连续工作150-180分钟左右。
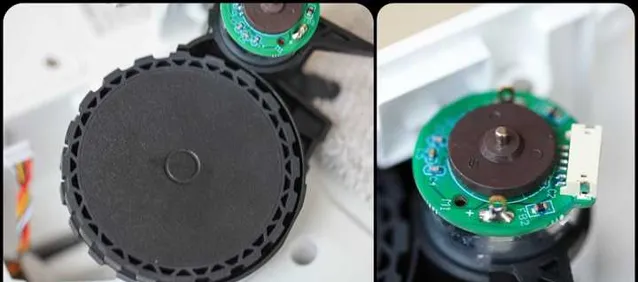
有趣的是,这台拖地机底部的驱动轮也采用了可更换设计,可以看到它的大防滑齿和减震层设计很精致,当然,电机方面的做工也是相当OK的。
使用
360小章鱼K7是一台专业的拖地机器人,那么它的实际拖地效果又如何呢?咱们还是用事实来说话吧。

作为一台智能拖地机器人,联网自然是它的最基本能力之一,借助360良好的网络开发能力,小章鱼K7的联网过程非常顺畅,只需要在APP里打开添加设备,并一路安装说明操作即可,联网速度也很快,整个过程也就20秒搞定。
小章鱼K7在正式投入使用之前,它支持快速建图的功能。我家的实际清扫面积约为60平米,它的第一次建图用时约9分钟,可以说是比较迅速的。建图完成之后,APP会自动进行房间划分,从上图里可以看到,房间分区基本符合事实,拖地机的智能分析能力还是值得称道的。
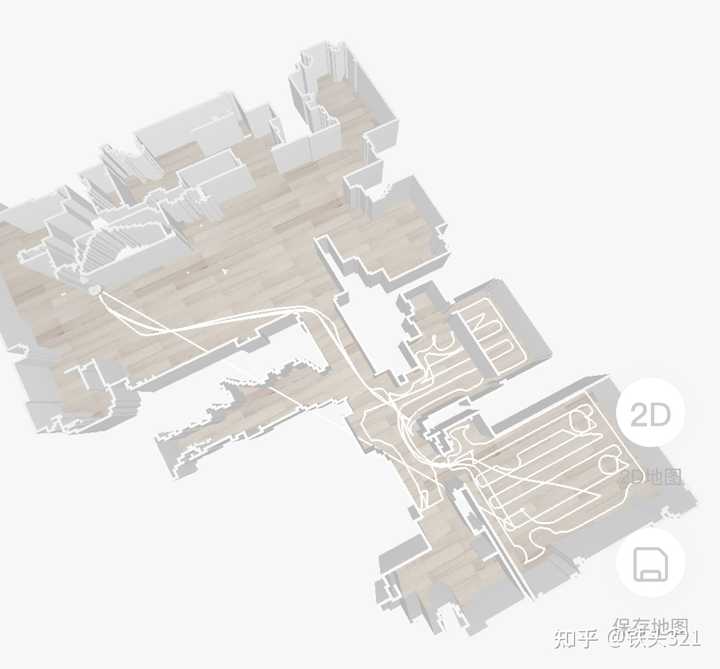
前面提到过360小章鱼K7具有dTOF扫描功能,因此它不仅能生成传统的2D地图,还能生成这个很酷炫的3D地图,地图支持旋转,缩放,平移等操作,是非常好玩的功能。
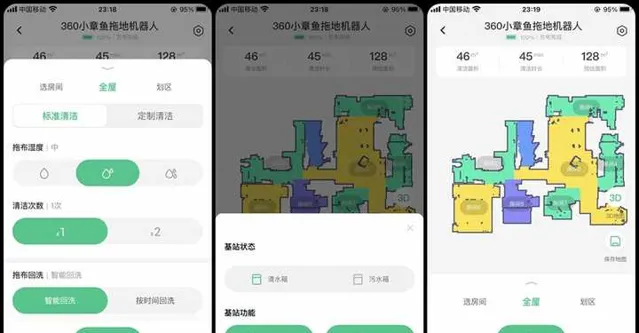
当然,像传统的拖地参数设置、选房清洁、划区清洁等功能小章鱼K7一样也不少,它还能在APP里设置基站的清洗拖布和风干功能是否开启。

开工啦,从机身的后部来看,4个小拖布转的飞快,而且在宽度方面果然很具优势呀。

看看沿边清扫时的状态,虽说没有完全贴死,但拖布距离墙壁的距离已经在1cm以内了,这比普通的扫拖一体机器人4cm左右的拖布缝隙确实小了很多。

360的避障和脱困算法还算不错,像这种椅子腿的间隙对于它来说可以说是及其紧凑,以前有很多扫地机都曾在这里翻过车,小章鱼K7居然能自己转进去又转出来,相当不错。
这是清洁时的路线,可以看到它的拖地算法确实贯彻了「由远及近」这一基本原理,距离基站最远的房间率先完成,这个算法可以避免污染已经清洁之后的地面。
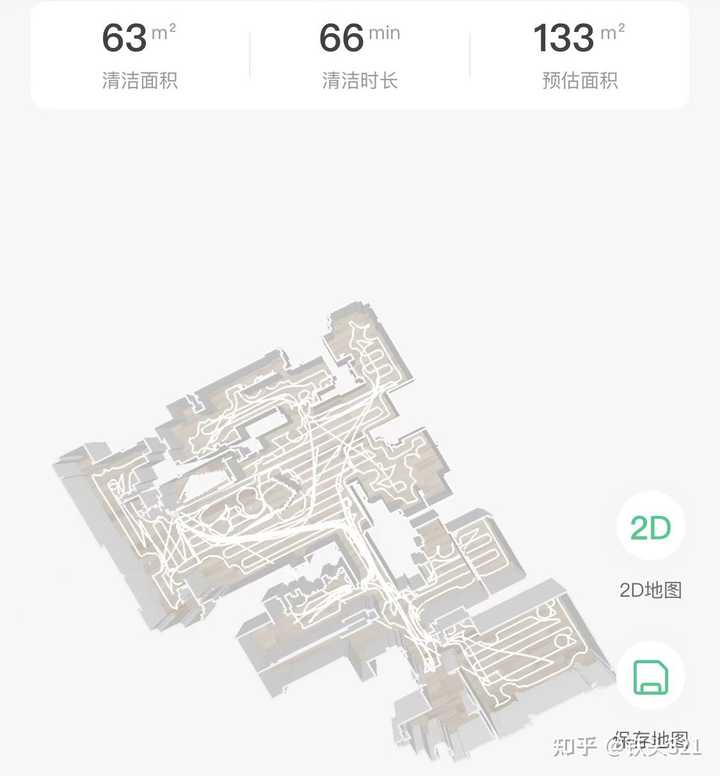
全屋清洁完毕之后的状态,实际清洁面积63平米,用时66分钟,这在扫地机器人中算是中游水平,而在专用的拖地机器人中......在我的这个房间曾经测试过的专用的拖地机器人里,某鲸J2全屋清洁的用时为2小时37分。

在清洁地面的时候,小章鱼K7低矮的机身优势非常明显,像我家这个暖气片离地高度只有8.5cm,以往的扫地机器人都拿它没有办法,小章鱼K7就刚刚好能进去清扫。

机器的四个拖布具有10N的下压力,因此它的清洁能力也很不错,像上图这样的酱油污渍,基本能够做到一遍清理,两遍无痕的状态。

作为一台专业的拖地机器人,它的基站清洗能力可以用「很强」来形容,从上图可以看到,刚刚清扫完酱油的拖布,经过基站自清洗后,基本恢复了本色,要知道酱油的染色能力可是很强的,很多扫拖机器人做完自清洁测试后,拖布都多多少少的会带有一点颜色。

360小章鱼K7作为一台拖地机,因为没有吸尘的部件,它的主机在工作时是基本没有声音的。所以噪音测试的这个项目我放在了回洗拖布的这个环节。测试的结果也很不错,离主机一米处录得最高噪音只有58.3分贝,连60都没上,可以说是比较安静啦。
结论
这次入手的360小章鱼拖地机器人K7,是一台设计指向性很强的机器。它的所有部件和功能都是为了拖地这一单纯的目标而设立的,也正是因此,在它的机身上出现了4个拖布这样的设计也并不奇怪。
借助这4个旋转地拖,小章鱼K7实现了超宽的拖地面积,可以在较少的次数内完成更大面积的清扫工作,而且沿边清洁能力超强,不会像普通扫拖机器人那样在拖地方面总会有遗漏的地方。
没有吸尘功能使得它的工作噪音极低,实际上基本是在睡觉的时候工作也毫不扰眠。当然,前提是你不要将基站放置在卧室里就好。
机器还提供了选装自动上下水,如果在装修时就预留好上下水管线的话,小章鱼K7可以真正意义上实现全自动拖地,在寿命周期内几乎不用再去管它,彻底解放了咱们的双手。











