前言
之前对机器人机构的建模都是采用的DH参数法,建立坐标,确定参数,确实比较繁琐
这次采用基于旋量的指数积公式之后,意识到运动学建模可以如此优雅简洁
自己也是从机械专业出身,在介绍相关知识方面,尽量通俗易懂
能不彪公式就不彪公式
注:
看完文章,就可以对串联机构进行建模,并且相关代码【现代机器人学】都附带,我将链接放在后面
文章中参考的资料都来自于【现代机器人学】,并且作者也在网站上公开了免费的电子版下载
会持续分享一些机器人相关的知识,欢迎关注Winter
大纲
文章一:举个例子看看基于旋量的机器人指数积POE公式比DH参数法简洁之处
文章二:用机械人能听懂的方式讲解方法的来历,做到心中有数
文章三:用Matlab的仿真模拟实验
直接上例子
这里的例子只是为了表明指数积公式的简洁之处,只需要三个步骤,至于为什么要这样做,将在下一篇文章中讲解
(左)通用机器人的UR5 6R机械臂。(右)显示在其零位置。绕所示轴的正旋转由通常的右手规则给出。
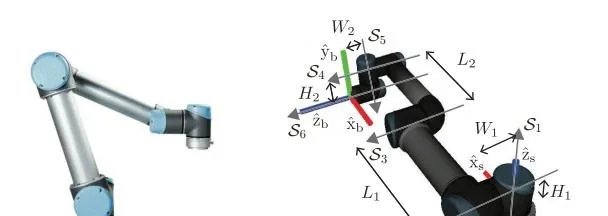 来自【现代机器人学】
来自【现代机器人学】
步骤一
先将这个机构摆放在初始位置,也就是关节位置为0
我们只关心两个坐标系,基座坐标系 Xs Ys Zs 如图 和末端坐标系 Xb Yb Zb
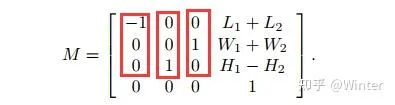
确定这两个坐标系后,写出末端坐标系相对基座坐标系的位姿矩阵M
 矩阵解读
我圈出来的三个向量分别就是末端坐标系的x轴y轴z轴 这三个向量 在基座坐标系中的向量
而第四列的向量就是末端坐标系的原点在基座坐标系中的位置
矩阵解读
我圈出来的三个向量分别就是末端坐标系的x轴y轴z轴 这三个向量 在基座坐标系中的向量
而第四列的向量就是末端坐标系的原点在基座坐标系中的位置
步骤二
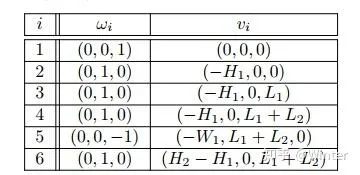
建立这样一个表
 表格
表格的第一列,就是对应着上图中每个旋转关节的轴线,在基座坐标系中的单位向量
第二列: v=r\times w
,r就是对应轴线上任意一点的位置,
拿第3行来说,图中第3个轴的轴线是 w=(0, 1, 0 )
,他经过了一个点, r=(L1, 0, p)
这个点是不唯一的,只要经过轴线即可, r\times w
进行叉乘为:( -p , 0, L1 )
表格
表格的第一列,就是对应着上图中每个旋转关节的轴线,在基座坐标系中的单位向量
第二列: v=r\times w
,r就是对应轴线上任意一点的位置,
拿第3行来说,图中第3个轴的轴线是 w=(0, 1, 0 )
,他经过了一个点, r=(L1, 0, p)
这个点是不唯一的,只要经过轴线即可, r\times w
进行叉乘为:( -p , 0, L1 )
步骤三
由上面的w v 组成 s
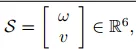 S就是指的运动旋量,这里我们先不管它,
S就是指的运动旋量,这里我们先不管它,
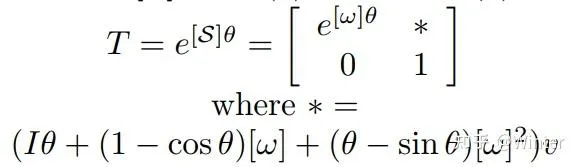 上面列出的表格中,每一行都可以得到一个T,这个T具体怎么计算看上面这个公式?
\theta
就是你这个关节要转多少度?
I
就是一个单位矩阵,
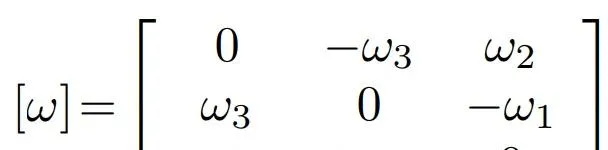
\left[ w \right]
长这个样子只要根据上面的w将它填成这样的矩阵就可以,
上面列出的表格中,每一行都可以得到一个T,这个T具体怎么计算看上面这个公式?
\theta
就是你这个关节要转多少度?
I
就是一个单位矩阵,
\left[ w \right]
长这个样子只要根据上面的w将它填成这样的矩阵就可以,
 最难的就是这个,其实就是我们的旋转矩阵,
最难的就是这个,其实就是我们的旋转矩阵,
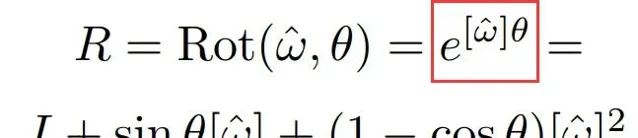 那你已经能根据旋量计算 每个关节的T矩阵
那你已经能根据旋量计算 每个关节的T矩阵
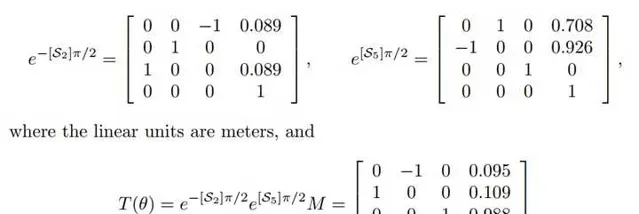
 这是最终的T矩阵
最终的矩阵,就是把每个旋转矩阵乘起来,最后再乘以我们刚开始的初始配置的末端矩阵M
这个例子中,
这是最终的T矩阵
最终的矩阵,就是把每个旋转矩阵乘起来,最后再乘以我们刚开始的初始配置的末端矩阵M
这个例子中,
 所以
所以
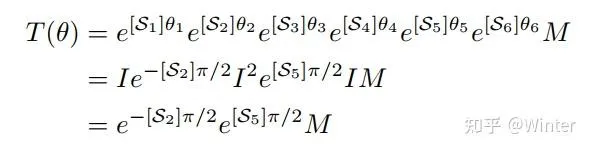 最终
最终
 你可以根据最终这个答案测试一下自己是否计算正确,
步骤是很顺利的,但有可能公式看起来比较麻烦一点,但在matlab的程序中是有作者写的库文件的,你只需要指定这个轴的方向和这个轴经过的点,以及M,它就可以自己完全计算了,
你可以根据最终这个答案测试一下自己是否计算正确,
步骤是很顺利的,但有可能公式看起来比较麻烦一点,但在matlab的程序中是有作者写的库文件的,你只需要指定这个轴的方向和这个轴经过的点,以及M,它就可以自己完全计算了,
经过上面三个步骤,我们已经会使用了这种方法,但是为什么好端端的旋转矩阵会跟指数扯上关系?更何况这个指数其中的参数竟然还是一个矩阵,
下一章节我们就探讨这个问题,用通俗的方法讲清楚这个,让我们心里有个底
如果觉得对你有帮助,欢迎点赞,或者关注交流
附录
这个是可以免费下载这本【现代机器人学】电子书的网址
http://
hades.mech.northwestern.edu
/index.php/Modern_Robotics#Book










