最典型的例子就是PID。
我们先看PID是怎么回事,下图是百度百科对PID的解释:

可见,PID的确是自动控制中重要的方法之一。
我们设自控系统输出量与控制点之间的偏差是e,于是PID输出量Y的表达式为:
Y=K_de+K_i\int_{t1}^{t2}edt+K_dde/dt ,式1
式1的等号右侧第一项是比例,第二项是积分,第三项是微分。比例用于实施与偏差大小成正比的控制,偏差e越大,输出控制量就越大;积分用于减小长时间的微小偏差,微分则用于对瞬变信号产生速动。
我们再看下图:
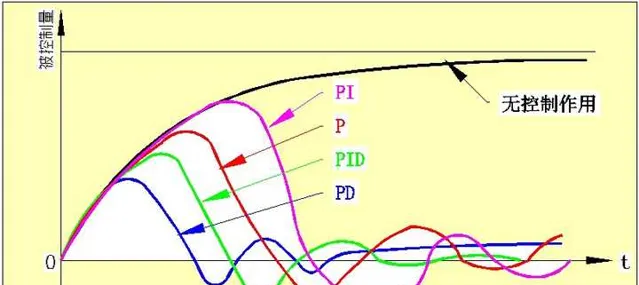
把图2与式1结合在一起,就能理解PID是怎么回事。
现在我们看下图:
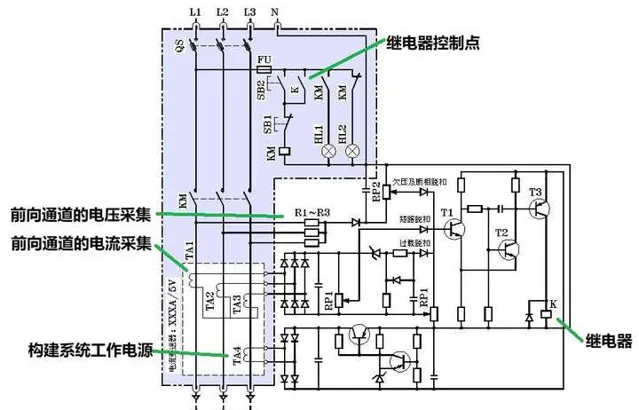
图3是电动机保护与测控电路。当我们按下起动按钮SB2后,接触器KM闭合工作,电动机进入起动和运行状态。电机在运行中无论是缺相、过载、过热和短路,电路都能起动保护作用,使得接触器开断。
这里用得到PID吗?显然不行,因为这里不属于过程控制,而是故障保护。因此,图3中必定会有所改变。
注意看图3中标注RP1电位器左侧的电容,它起的作用类似积分,实现过载保护的延迟。再看T1和T2的施密特触发器,T2的基极和集电极之间有一个电容,它对于翻转和继电器吸合也起到一定的作用。
我们再看下图:

图4就是真正的PID电路,此图摘自我设计的一款温度控制器。我们看到了比例P、积分I和微分D电路,当然都是用运放来构建的。此电路作为晶闸管触发电路的前置电路。
这些电路供参考。
由此可见,PID控制和真正意义下的自控,一般都用于生产的过程控制,对于快速的控制一般不会用到。
回答就到这里吧。











