因為每款機器,配置還有功能不一樣,就像手機一樣,安卓入門機和IPhone13pro能一樣麽?這裏給大家分享下選購掃地機器人的參數,
還有各個價位機型推薦!想看具體推薦的可以翻到最後
一、什麽是掃地機器人
有喜歡打掃衛生的小夥伴請舉手,但凡超過2個算我輸,自從有了掃地機器人,又懶又有潔癖的小夥伴,終於體驗到了大戶人家擁有清潔保姆的感覺。
下面我來好好掰扯掰扯,給還沒入手的小夥伴避個坑。

1. 能幹什麽
掃地、拖地,清理90%以上的臟物,清如毛發、小型果殼、貓砂、灰塵、麪包屑等細小垃圾,剩下10%屬於大型垃圾,油汙等,需要人工介入。不過這也極大程度減少拖掃地的次數,只要平時稍加註意,基本上可告別這一項家務。

2. 適合人群
社畜:
上班已經很累了, 回到家看到臟臟的地板,心情更糟
萌寵家長:
家裏哪哪兒都是毛,剛拖的地,沒過兩分鐘又有毛(誰養誰懂)
長輩:
減少長輩打掃家務的時間, 讓他們多享受生活
大戶型:
日常清理地板所需時間太長,換到誰身上都不劃算
日常無法清理房間死角的人:
床底、沙發底下看不到不代表幹凈, 想想每次挪動它們的慘相
3. 如何工作
將充電座可插電的固定位置,機器人會在充滿電後從此地出發開始清掃工作,同時,會建立一個包括障礙物的二維地圖,規劃房間有效的清理路徑,完美覆蓋全屋空間。清理完畢或需充電時,它會自動返回充電站充電。
依靠一對側刷和一個滾刷,將遇到的的垃圾碎片,甚至是墻角的灰塵引導到吸塵口,再使用真空泵將垃圾吸到集塵盒內,最後,配合一個濕潤的拖把附件,清理地板上的頑固汙漬
畢竟家裏的很多東西會移動,比如:椅子、電線、玩具、衣服、寵物粑粑之類的,甚至向下的樓梯也不用擔心它會掉下去,機器人會透過三維深度傳感器,避開不可預知的障礙物,且可透過2厘米的高度差,可輕易透過門檻條、毛毯等裝置。
二、基本參數
1. 吸力
吸力只是清潔能力的
參考
參數,達到2000Pa往上基本夠用,要想達到高畫質潔率,還得看其他參數。
2. 清掃方式
吸口式:
主要省去了底刷設計,單靠吸力處理垃圾,市面產品較少,相對清掃能力要弱於刷毛式;
刷毛式:
由邊刷、底刷、吸口組成;邊刷又分為單刷與雙刷,邊刷主要聚攏垃圾,再交給底刷與吸口處理;雙刷聚攏效果要稍好,但清掃力度不一定更強;對於底刷,又分為滾刷與雙膠刷。
區別:主要在於滾刷適合普通垃圾的處理,而雙膠刷則對於毛發有更好的防纏繞能力。
3. 越障能力
越障高度普遍在2cm,屬於一個普遍適應的高度。
4. 拖地模式
前掃後拖:
工作一遍即可將地板清理幹凈,較為節省時間。
掃拖分離:
先清掃一遍地板,再將清掃過的地板噴水後拖一遍,清潔效果更好。
三、關鍵參數
1. 虛擬墻類別
虛擬墻的作用就告訴機器人,這個區域不能進入,比如衛生間和廚房,衛生間濕噠噠的,而且會有毛發,纏繞在毛刷上,降低附件使用壽命。為避免這些問題,就靠虛擬墻來約束機器人。

硬件虛擬墻還是比較適合長輩使用,畢竟操作簡單,替換、拆卸都很容易。
2. 避障類別
 3D結構光:
與結構光類別有關,散斑投射範圍內可獲得相對準確的深度資訊,因影像為編碼圖案,較難完成影像辨識,避障效果有限;
單目避障:
僅對已辨識物體避障,且透過假設物體在地面,由影像高低預估距離,精準度低,避障效果有限;
雙目避障:
可獲得視覺範圍內障礙物深度資訊,同時根據物體辨識結果進行策略性避障,綜合避障效能高;
激光雷達:
可獲得掃描範圍內障礙物深度資訊,但無法辨識障礙物種類,無法進行策略性避障;室內機器人激光線束有限,很多掃描不到的障礙物無法避開;
3D TOF:
可獲得面光源覆蓋範圍內障礙物深度資訊,但無法辨識障礙物種類,無法進行策略性避障;
3D結構光:
與結構光類別有關,散斑投射範圍內可獲得相對準確的深度資訊,因影像為編碼圖案,較難完成影像辨識,避障效果有限;
單目避障:
僅對已辨識物體避障,且透過假設物體在地面,由影像高低預估距離,精準度低,避障效果有限;
雙目避障:
可獲得視覺範圍內障礙物深度資訊,同時根據物體辨識結果進行策略性避障,綜合避障效能高;
激光雷達:
可獲得掃描範圍內障礙物深度資訊,但無法辨識障礙物種類,無法進行策略性避障;室內機器人激光線束有限,很多掃描不到的障礙物無法避開;
3D TOF:
可獲得面光源覆蓋範圍內障礙物深度資訊,但無法辨識障礙物種類,無法進行策略性避障;
綜合來看,比較推薦
雙目避障類別
的掃地機器人。
3. 導航技術
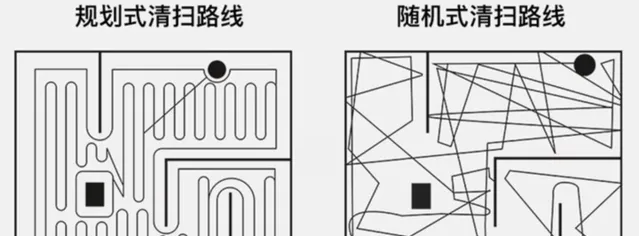
目前存在路徑規劃導航和隨機導航兩大類, 有路徑規劃功能的就不會放過房間內的任何一個死角,隨機導航基本快淘汰,不建議購買。
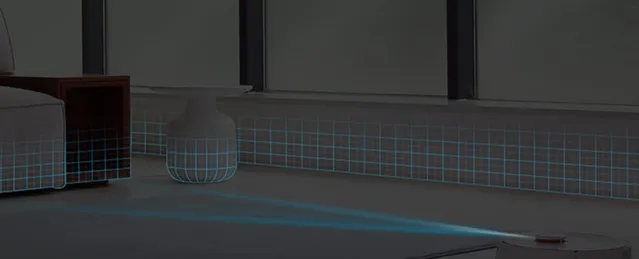 視覺導航:
基於激光雷達的SLAM依靠激光測距傳感器對房間進行掃描,當激光投射到障礙物上時,會形成光斑,影像傳感器會根據光斑的像素序號來計算到激光測距傳感器的中心距離,再結合掃地機器人自身的演算法,構建房間地圖,並即時定位清掃
視覺導航:
基於激光雷達的SLAM依靠激光測距傳感器對房間進行掃描,當激光投射到障礙物上時,會形成光斑,影像傳感器會根據光斑的像素序號來計算到激光測距傳感器的中心距離,再結合掃地機器人自身的演算法,構建房間地圖,並即時定位清掃
 激光導航:
視覺導航也叫vSLAM,掃地機器人上會有一個網絡攝影機,和激光SLAM類似,透過收集到的點雲數據計算障礙物距離,然後基於單目、魚眼相機的vSLAM方案,利用多幀影像來估計自身的位姿變化,再透過累計位姿變化來計算距離物體的距離,並進行定位與地圖構建。
激光導航:
視覺導航也叫vSLAM,掃地機器人上會有一個網絡攝影機,和激光SLAM類似,透過收集到的點雲數據計算障礙物距離,然後基於單目、魚眼相機的vSLAM方案,利用多幀影像來估計自身的位姿變化,再透過累計位姿變化來計算距離物體的距離,並進行定位與地圖構建。
 陀螺儀導航:
慣性傳感器使用陀螺儀和加速度計得到機器人的角加速度和線加速度資訊,透過積分獲得機器人的位置資訊。但是其精度也要受陀螺儀漂移、標定誤差、敏感度等問題影響,但有一個缺點:有累積誤差,隨著行駛時間、距離的不斷增加,誤差也不斷增大。因此相對定位法不適合於長時間、長距離的精確定位。可以把這種演算法想象成盲人摸象,盲人也可以按自己的感覺做出走出直線、旋轉180度的動作,看起來也是弓字形行走,但如果頻繁轉向、頻繁碰撞,會越來越無法保持正確的行走方向。
陀螺儀導航:
慣性傳感器使用陀螺儀和加速度計得到機器人的角加速度和線加速度資訊,透過積分獲得機器人的位置資訊。但是其精度也要受陀螺儀漂移、標定誤差、敏感度等問題影響,但有一個缺點:有累積誤差,隨著行駛時間、距離的不斷增加,誤差也不斷增大。因此相對定位法不適合於長時間、長距離的精確定位。可以把這種演算法想象成盲人摸象,盲人也可以按自己的感覺做出走出直線、旋轉180度的動作,看起來也是弓字形行走,但如果頻繁轉向、頻繁碰撞,會越來越無法保持正確的行走方向。
四、常見問題解答
掃地機器人吸力越大越好?
並不是哦。吸力過大,噪音也會明顯,耗電也會更快。 實際清掃時,必然需要有進風口,有空氣流動才能帶動灰塵。如果沒有空氣對流,不管抽風的吸力多大都無法撼動碎屑,所以掃地機器人吸力數值的大小並不代表能否吸得幹凈。清掃效果好,噪音小,這樣的掃地機器人才有好的清潔能力!
為什麽掃地機器人經常「碰壁」?
一方面與掃地機器人自身的避障能力有關,另一方面有可能是清潔空間不足。一般來說,掃地機器人能不能成功避開桌子腿,就能知道它的避障能力如何。想要掃地機器人成為家務好幫手,記住以下的使用小tips: tips1:最好在使用掃地機器人時設定虛擬墻禁區,如在全域清掃模式時,設定禁區為衛生間。 tips2:清掃前請將電線、臭襪子等會讓掃地機器人發生纏繞、卡死的物件全部收拾好,盡量給掃地機器人一個無障礙的工作區域。
為什麽掃地機器人用不到幾次就要充電?
可能是你的集塵盒滿了!你是不是覺得很驚訝,這個有什麽關系。這是因為使用時間長了,集塵盒集滿後,掃地機器人就不容易把垃圾放入到集塵盒裏了,吸力也會減弱,因此可能要打掃久一點才能清掃完畢,自然耗電速度也會更快。 tips1:定期清空集塵盒和濾網,才能讓掃地機器人更好的運作。 tips2:保持充電樁附近無遮擋物,保證掃地機器人開始工作和返航充電運作正常。
為什麽機器只會沿著墻壁掃?
這與掃地機器人的清掃模式有關。一般來說掃地機器人有五檔清掃模式: 隨機清掃:機器會根據不同環境進行隨機自動清潔。 重點清掃:對於局部特別臟的地方進行旋轉式清掃,是力度更強的一種清潔模式。 沿墻清掃:機器人會自動沿著墻壁進行清掃。 預約清掃:不在家的時候可以真正做到「我負責出門玩,它負責家裏玩」的效果。 弓字型清掃:這種清掃模式需要將障礙物盡量移開,給予足夠的清潔空間給機器。 tips:想要達到「指哪掃哪」的效果,應該選擇重點清掃模式。
五、總結
給最近準備入手掃地機器人的小夥伴給個範圍,有針對性的挑選:
1000元:
360掃地機器人X95 (性價比高,新人體驗,長輩首選)
2000元:
小米全能掃地機器人(米家智能家居生態不錯、具備家用不錯的體驗感)
3000元:
雲鯨J2掃拖一體機,最大的優勢就是升級了自動上下水功能,徹底解放雙手
4000元:
不僅在智能控制系統的上做了很大的升級,而且避障模式和硬件方面也做了很大的升級,用起來更好用!智能化程度非常高!
5000元:
各方面參數都不錯的機器,特別是在毛發清理、拖地程度、自動集塵功能上!
6000元:
這裏想推薦的是科沃斯X1,但是知乎沒有錄入這款機器,所以就不放連結了,價格達到了5999元,可以說是目前掃地機器人中天花板級別了的,各方面都做的非常優秀,不差錢的可以入!











