我在做這個實驗之前,認真讀了知乎上關於掃地機器人的各種提問,特別參考了熊熊的回答,以及他所提供的國外評測影片,表示感謝。
從某東上買了多款款機器人。
本著模擬家用環境並玩殘機器人的宗旨,設計了一套遊戲規則。
清掃能力測試
在這麽一間30平米的房間內,設定了90°直角、椅子底下的死弄堂(測試死角清掃能力)、加厚的防滑地毯(測試爬坡能力和深層清掃能力)這麽幾處障礙。用紙屑、瓜子、米粒、頭發絲、踩碎的谷物屑設定了10處不同類別的垃圾。
把所有的掃地機器人都設定成全自動模式,放出去工作,當他們自己覺得工作完畢並自動回到充電樁後,再來看它們清掃的結果。
1號機器人,irobot 價格3280.
感應到有垃圾存在時,機器人會對這塊區域進行反復清掃;

地毯也能輕松爬上,而且順利帶走了上面的紙屑和米粒;

進入狹小的空間,能成功逃離;

墻角的頭發絲能輕松掃掉;
直角區的瓜子清理掉了一半。

整個過程耗時40分鐘,10處垃圾全部清掃到,覆蓋率100%,最後自動回到出發區,對準充電底座開始自動充電。
有人說是吸力,因為吸力大吸得就幹凈。
有人說是智能,就算是個吸力大的掃地機器人,如果不知道去哪兒吸,多大的吸力都沒用。
想讓掃地機器人,代替你打掃房間,最關鍵的是兩點:
知道去哪兒掃以及掃的幹不幹凈。只有可以把該掃的地方都掃幹凈的,才是一台合格的掃地機器人。

從這一點上來說,360 X100 MAX就做的比較好。
- 三目激光矩陣雷達,讓機器知道去哪兒掃
該掃的地方不掃,掃過的地方總是掃,這大概是很多人對掃地機器人不滿意的地方,這主要是機器對於目標區域的掃描判斷不準確。
比如碰到障礙物,有些機器人就會出現辨識不準確的情況,可能它只是一個掉落在地上的玩具,也可能是被移動過的椅子,這時候能夠準確辨識障礙物就顯得十分重要。
360 X100 MAX采用了三目激光矩陣雷達,分別是一顆LDS激光雷達和兩顆OLS激光雷達。
雷達多有什麽好處?其實從它的名字就能理解,三目激光矩陣雷達,其中的三目就相當於是三只眼睛。
用我們人類自己打比方的話,一目就是一只眼睛,在只有一只眼睛的情況下,你大概智能看到前方一半的視野;如果是雙目,也就是兩只眼睛,那你就能看到前方所有的視野。

可能人類是沒必要長第三只眼睛,但是掃地機器人如果有三目,那對於它的智能化程度提升是非常明顯的。
掃地機器人在前進的過程中,不但需要感知前面的障礙物,還要感知側面的障礙物,這樣才能做到角落或者狹長的場景下也能辨識。

同時它還搭載了NASA火星探測車同款dToF掃描技術,毫米級精確度的建圖,以及更全面的全屋規劃。這樣就可以更加準確地辨識並避開障礙物,機器就會清楚的區分出哪裏應該清掃,哪裏應該避開。
這個功能最實用的場景是,以前家裏也用過其他品牌的掃地機器人,但是它們通常有很大概率辨識錯誤障礙物。
比如地上的體脂稱和拖把放在一起,機器人往往辨識不了或者辨識一個,造成的結果就是它會繞開體脂稱,但是就會蹭倒拖把。
360 X100 MAX讓我很吃驚的是,就算地上放在體脂稱,旁邊放著拖把,再邊上有一雙拖鞋,它也能完美的貼著它們走,繞開障礙物。

精準辨識的另外一個好處就是省錢。你沒聽錯,省錢!
原來那個掃地機器人,因為經常辨識不出桌腿、凳腳,就會撞上去,機器人本身磕磕巴巴不說,撞得桌子椅子櫃子也磕磕巴巴,超級難看,時間上了還得花錢處理這些家具上的傷口。
除了雷達更多更加先進之外,這次360 X100 MAX雷達的放置也不一樣。
傳統的做法是雷達會放置在機器人的上面,這樣一來方便了掃描,但是無形中也增加了整機的高度。
機器高度變高,帶來的直接影響就是可能無法進入到床、櫃子和沙發這些本來底就很低的地方,清掃不到位。
360 X100 MAX把雷達隱藏了起來,做到了低矮空間不卡殼。
2. 吸力大,才能掃的更幹凈
其實我一直認為,知道去哪兒吸比吸力大小更重要。
但是如果在做到了精準辨識的前提下,那麽吸力更大顯然是更好的,畢竟吸得幹不幹凈,最直接的因素就是吸力大小。
360 X100 MAX采用了3300Pa超強吸力,這是什麽概念呢?
很多同價位、同級別的掃地機器人,吸力可能只有1000多Pa或者2000Pa,360 X100 MAX幾乎是它們的一倍以上。
使用過程中我發現,不論是花生、瓜子這些大一點的垃圾,還是米粒、芝麻甚至鹽這種非常小的垃圾,360 X100 MAX都能清掃得很幹凈。

其實用過掃地機器人的都知道,在光滑的表面上比如瓷磚或者木地板上,大家的清掃能力並不會差太多,能拉開差距的地方,一個人邊邊角角,一個人地毯。
邊邊角角很容易理解,像360 X100 MAX這種可以精準辨識的,可以實作貼邊清掃的,再搭配大吸力,基本不會有掃不幹凈的情況。
但是地毯就不一樣了,有些厚的地毯,垃圾或者細小顆粒物藏的比較深,要想把深處的垃圾吸出來,最簡單粗暴且有用的,就是大吸力了。
但是這對掃地機器人來說又會出現一個問題,比如在光滑的地面上,清掃垃圾可能1500Pa的吸力就夠了,但是到了地毯上,就需要3000Pa以上的吸力。
如果一直是1500Pa,地毯上就會吸不幹凈,一直是3000Pa就會很費電,可能一趟沒吸完就得充電,這就降低了工作效率。
360 X100 MAX除了有四檔吸力調節外,還會智能辨識地毯,到了地毯上,就會自動增加吸力,把地毯深度的細小顆粒物吸出來。

3. 水箱和垃圾箱,越大越好
前面已經說到了,買掃地機器人的最大原因是自己懶。
所以,買掃地機器人我還是更推薦掃拖一體的,掃地都交給機器人了,沒道理拖地還自己來的。
掃地和拖地,機器人都會自己搞定,充電它自己也沒問題,可能唯一需要你動手的,就是傾倒垃圾和加水了。
所以,懶癌八級或者鄭重提醒,買掃地機器人,垃圾箱和水箱一定要大。能少到一次是一次,能少加一回事是一回。

可以簡單地做個算術題,倒一次垃圾,比如是360 X100 MAX有一鍵傾倒功能,雖然很方便,但是拿出來,走到垃圾桶前倒垃圾,再回去把它裝好,這個過程起碼20秒到半分鐘吧。
垃圾箱容量小一點的,可能三四天或者一禮拜就要掃一次,容量大的可能一禮拜或者兩個禮拜倒一次。
如果每個禮拜少倒一次,就相當於省下來半分鐘,一個月就是兩分鐘,一年就是24分鐘,按80歲計算,公共可以省下32個小時。
這還只是倒垃圾,如果再算上水箱小導致加水次數變多,按同樣的時間算,就可以節省64個小時。這64個小時,拿來睡覺、看劇、玩遊戲它不香嘛?

如果你買了掃地一體的,記得千萬要看清楚它戴不戴辨識地毯功能,這個非常重要。
之前我使用的掃地機器人也是,覺得掃拖一體的很好,結果有一次回家,發現地毯變濕了,警覺性很高的我當時還以為家裏進小偷了。後來透過查監控才發現,原來是機器人拖地的時候把地毯也一起拖了,所以才搞的濕乎乎的。
像360 X100 MAX這種帶有智能辨識地毯功能,就可以實作拖地的時候不上地毯,避免把地毯弄濕。
掃地機器人還有一點很對人會忽視的就是噪音。因為大部份時候都是你出門了,掃地機器人才開始工作,這時候噪音再大都沒關系。但是一到周末節假日就不同了,好不容易休息下,誰不想睡個懶覺,這時候掃地機器人早上開始工作了,噪音一上來,睡眠質素差一點的,可能就睡不著了,等你起來把它關掉,再上床很可能就沒睡意全無了。所以掃地機器人的噪音其實很有必要。
360 X100 MAX采用了10重降噪,其中二重消音風道專利降噪技術,做到不損失吸力的情況下,也可以實作更低的噪音。

總之,買掃地機器人並不只是單純的看吸力大小,而是要結合吸力、智能程度、傾倒加水易用性、甚至噪音等等因素。只有像360 X100 MAX這樣,把技術和細節都做到位的掃地機器人,才是值得推薦和購買的。
在2000-3000的檔位,360的 X95性價比算比較高的,帶有拖地的功能,相比只有掃地功能,掃拖一體明顯更加實用。
現在的掃地機器人,都是帶充電樁的,連個自動回家充電都沒有就可以結束直播了。
有意思的是,360 X95的充電樁可以在背部收納電線,讓充電樁擺放更加整潔,讓強迫癥的我非常舒服。

360 X95的水箱位於機身上部,開啟上面的蓋板就可以拿出來。

容量為200ml,看似不大,但足夠用。
而且它的水箱是電控的,有3種壓力可選,能在APP上根據房間實際情況,來調整水量。
但從實際的體驗來看,120平米的房子,360 X95的200ml也完全夠用。
清掃能力
作為掃地機器人最重要的就是清掃能力,如果連地都掃不幹凈,那也就不配叫掃地機器人了。
推薦360 X95最大的原因是因為它吸力大,最大吸力為2650Pa。
在大吸力面前,其他都是浮雲。
而且吸力檔位都是可以透過APP調節。

我模擬常規垃圾清掃,做過一個測試
首先分別使用米、紅豆、薯片碎屑、鹽來模擬生活中常見的地面垃圾,來測試它們的清潔效率。

360 X95的清掃速度也很快,加上2650Pa的產大吸力,掃地機器人經過的地方,基本上被清掃的非常幹凈,垃圾也沒有飛濺的情況。
另外,家裏有汪星人或者喵星人的都知道,家裏的毛發是真得多。鏟屎官白天還會出門上班,它們基本上一天24小時都待在家裏,所以對掃地機器人一個比較大的需求是清理毛發能力。
用不同材質、軟硬的毛發,來模擬復雜的家庭毛發清理場景。

對毛發的清理效果都比較好。基本上掃過的地方就沒什麽殘留的毛發。
毛發很輕,這就對吸力大小沒什麽苛刻的要求,很小的吸力就能把毛發吸走。第二毛發比較細,對進塵口沒有太大的要求。第三是刷頭對毛發的清掃和吸附能力比較好。

邊角清理能力
家庭環境中,邊角也是特別難清理的,因此我們在一個墻角處也放置了等量的不同顆粒大小的垃圾進行實測
由於不是D型機器人,所以角落深處的垃圾都沒法徹底清理,除此之外的垃圾,基本都能清理幹凈。

靜音技術
前面剛表揚過360 X95的吸力大,但在最大檔滿動力輸出時候,360 X95工作時的噪音,為75.8分貝。在切到靜音模式之後,音量可降到一半以下。

所以,不是非常臟的情況下使用自動模式或者靜音模式即可。
特別是周末,記得將掃地機器人工作的時間設定的晚一點,哈哈。
避障測試
對掃地機器人來說,避障也是一個很重要的功能。
考驗的就是它對距離的探測(離障礙物遠近)、探測範圍大小(能不能感知或提前感知障礙物)、探測高低(很多機器人的探測高度有限制,對低矮障礙物不容易感知)。
而360 X95對於中、大件物體的避障還是非常聰明的。
但是對於扁平低矮的的東西,就略微有些懵逼。
像拖鞋這樣的小障礙物,雖然已經壓了上去,但很快辨識到前面高起的鞋面,它就迅速扭頭跑路了。
另外,360 X95采用了LDS激光雷達+超聲波融合導航。可以辨識玻璃物體,再也不怕誤傷老媽的工藝品了。
爬地毯測試
家裏的地面,有時候並不是平常平整的,特別是門口都會有幾厘米的高低落差,有時候厚一點的地毯也會有2厘米左右的高度。
這時候,掃地機器人的爬坡能力就很重要了。
360 X95還是很順利的爬上去了。
防纏繞功能
隨著家裏各種智能家居、手機、平板越來越多,家裏的各種充電線、數據線也越來越多,很多時候掉在地上,或者一頭連著器材一頭掉在地上的情況都有。
這時候,如果掃地機器人經過,一旦這些數據線被吸入機器人底部,可能會對掃地機器人清掃產生障礙。
為此,我們把數據線的一頭固定,另一頭放在地上,測試掃地機器人有沒有防纏繞功能。
這種情況比較難辨識,原因就在於數據線很細小,不規則,這對辨識系統來說還是有難度的,從監測結果來看,目前的掃地機器人對這種情況都沒有很好的辦法。
所以,大家在日常使用的時候,還是要註意類似情況的發生,收好數據線,哈哈
軟件測試
現在沒個APP,都不好意思說自己是「智能」掃地機器人。
360 X95的APP實用性還是不錯的。
它分成了指定房間、全屋清掃、指哪掃哪這三大功能區。

每個功能區可以單獨設定吸力大小,以及拖地的出水量,這樣設定的好處是,像廚房這種需要重度清掃的區域,可以用大吸力,大出水量來進行掃拖,而臥室這類相對幹凈的區域,就可以用小吸力、小出水量就可以清掃幹凈。相對來說更加智能。
除此之外,它還有很多高級功能可選,比如房屋劃分、多樓層管理、定時清掃、甚至還能手動遙控掃地機器人,實作更精準的清掃。

小號掃地機器人
價格399.
1、體積小重量輕,無充電底座,要手動啟動;
2、底盤低,比較容易卡住;
3、功率小,遇到地毯徹底歇菜;
4、頭發、紙屑這樣的垃圾,只是卡在機身底下拖著跑,並沒有真正進入儲物盒;
一個小時以後,10處垃圾有5處沒有掃到,而且儲物盒較小,儲存能力有限。
測試二:脫困能力
復雜環境下,脫困能力也是智能化的一種表現。我才不想我的機器人動不動就卡在電線堆裏,而我還要保姆一樣去救他呢。
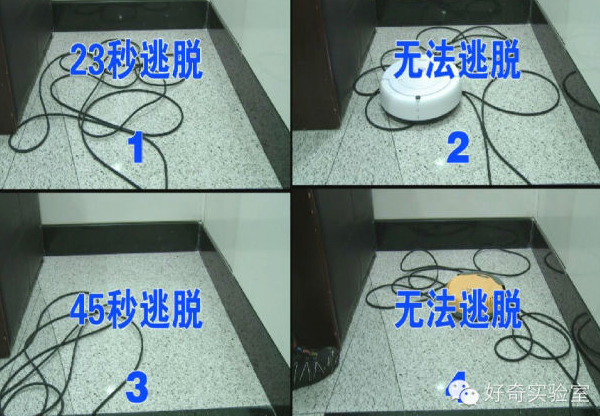
測試結果:1號耗時23秒後成功逃脫,3號用時45秒,拖著電線走了一段路後勉強逃脫,2號和4號則全部卡住。
測試三:智能防撞
在家裏清掃,必然會碰到墻壁桌腳,就怕機器人死磕不懂回避;但如果它距離很遠就躲開,就掃不到邊緣的垃圾,所以這個智能化很重要。
1號機器人接近障礙物時,會明顯減速緩沖,然後輕輕地碰一下障礙物,隨即掉頭;
2號機器人直挺挺地撞向障礙物,遇到阻力後會稍微調整方向,反復撞擊;
3號機器人在接近障礙物的一瞬間,突然急剎車,然後扭頭就走,與障礙物沒有任何接觸,這就意味著它會遺憾地留下清掃死角;
4號機器人也是勇猛向前,碰鼻子後才轉向,沒有任何預防措施。
除此之外,這幾年國內掃地機器人市占率最高的品牌一直是科沃斯,陸陸續續關註了這個品牌的多款產品,最近釋出的這款掃地機器人DG70,使用體驗不錯,算是4000多價位的補充 。

與其他掃地機器人不同的是,這款多了個網絡攝影機,用於視覺辨識。
而且還有個水箱,多了個拖地的功能。
對於掃地機器人來說,這兩項新功能到底好不好用?

對於一款掃地機器人,最重要的還是它的清潔能力。
我們模擬家中環境,在客廳的各種角落放置各種垃圾,有零食,頭發,紙片,碎屑等。
整個客廳看起來像是一個月沒有打掃的樣子,然後放出DG70

DG70有標準和強勁兩種吸力模式。
應對地面上布置的各種垃圾還是比較輕松的,清掃能力可以給個五星滿分了。

清掃時發現,在遇到地毯時,DG70會辨識出地毯,自動增加風壓,大吸力吸出地毯垃圾;辨識台階,回退調整方向;辨識帷幔窗簾,穿越軟性障礙;辨識墻角,沿邊精細打掃。


在實測中,我們發現這台掃地機器人的走位相當風騷,遇到各種問題都能輕松躲避。
特別是,在面對拖鞋、電線、襪子等物體時會智能辨識並避開,這就要歸功於DG70的AIVI視覺辨識技術和LDS激光導航定位。

AIVI視覺辨識技術透過網絡攝影機能夠清楚的看清室內地面情況,遇到障礙物,智能辨識障礙物類別,采取不同的避障策略,防止一通亂吸。
以往掃地機器人多采用隨機或陀螺儀的路線規劃,隨機路線淩亂,等同於閉著眼睛掃地,肯定掃不幹凈;單一的陀螺儀路線,也會出現偏差漏掃。
DG70的清掃路線合理,測試過程中也沒有發現漏掃。

另外可以使用APP,透過360°掃描和LDS測距,完成家庭環境建圖,自動按房間分為若幹區域,可按房間逐一清掃,也可選擇若幹區域單獨清掃。
DG70清晰知道已掃區域和未掃區域,缺電回充或搬動機器後,掃地機器人繼續打掃未掃區域。
還可透過APP定時預約,隨時隨地都可開啟打掃模式。

另外,比其他幾款多了拖地功能,這可是很多家庭主婦夢寐以求的功能。
機身配備了一個280ML的水箱,內建增壓控流裝置,滲水速度全程可控,水速4檔可調,有效均勻,吸地之後,配合滾刷拖滾地面,二次清理地面垃圾。
實測下來,按我家146平方的戶型,加一次水能拖完,不必中途人工加水。

總的來說科沃斯DG70透過一掃一拖,可輕松滿足日常家庭地面清掃要求。
本次測試談不上多少專業,但自認為還是比較實用的。
補充點實驗外的使用心得,我給麻麻買的是一號機器人裏更高配置的,在上面貼了張自己的照片,就當是我在給麻麻掃地了,從此她再也不來嘮叨我了。
我覺得家裏那台掃地機器人的效能還是明顯高於實驗用的測試機,但價格也超過了題主所設定的範圍,因此沒搬出來測試。
但從本次實驗結果來看,確實一分價錢一分貨,而且大牌的廠商還是有它牛B的技術在裏面的。
所有測試的掃地機器人工作時候的響聲還是覺得略大,大概在30分貝左右,會嚇到家裏膽小的汪星人。
對了,如果你家裏有狗狗貓貓的話就會感覺掃地機器人的垃圾盒子完全不夠大啊。
友情提醒,急性子的同學就不要看著他工作了,出門上班,就丟他一個人在家裏掃地吧,不然看著他慢悠悠的晃悠真的會戳死的。









