可以檢測,但具體是不是避開,就另說,看機器的工作邏輯。
掃地機上有一種比較古老但很簡單的超聲波傳感器,並且這個傳感器基本上已經成為掃地機器人的標配元件(下圖中綠色框內):
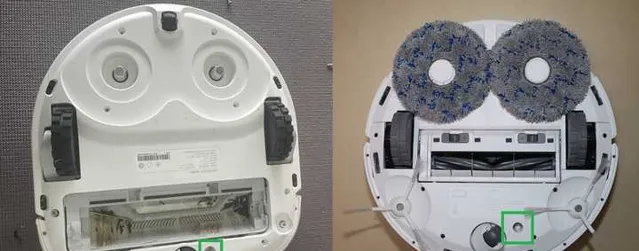
大家也能看到,這個用於檢測地毯的超聲波傳感器,其位置相對固定,普遍安裝在機器正前方邊中心緣處,為的就是在機器前進時,第一時間能檢測到地毯,做下一步決策,後續的執行邏輯可能有以下幾種:
下面介紹下超聲波原理,估計很多理科類知友都比較熟悉了,簡單描述下:
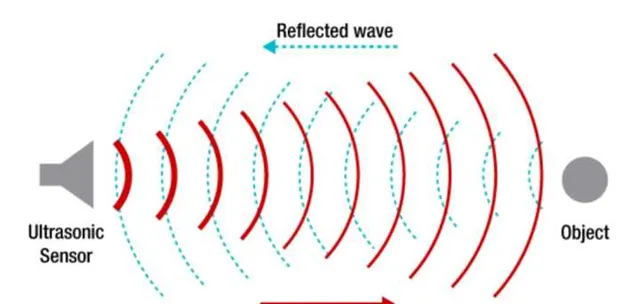
傳感器將電訊號轉換成高於聲波頻率的波,發射出去,遇到障礙物反彈後返回到傳感器,因為固定頻率的波形傳播時有固定的速度,透過波形的飛行時間可以測算出障礙物的距離。
當然,實際選擇具體的傳感器時,會考慮到超聲波的頻率、驅動換能器的功率、方向性等等,這些研發工程師會完成選型工作,以匹配掃地機地面檢測時的需求。
了解了原理後,就會發現,超聲波傳感器在掃地機上能衍生出多種用途:
本問題下,題主要了解的是地毯的檢測,所以,我就只分析地毯檢測的原理,我們來看一張圖:
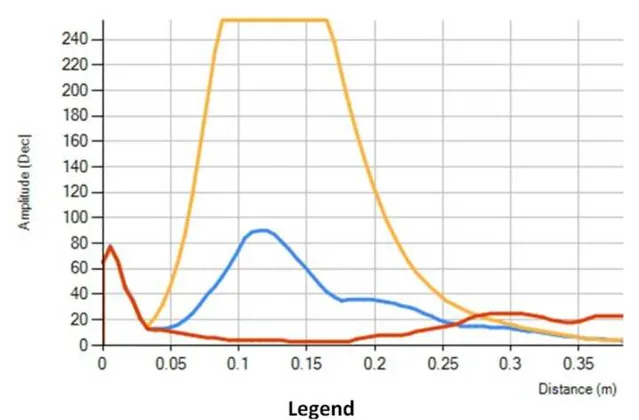
這是一個用於辨識地面類別的超聲波傳感器,它的最大有效距離是幾十厘米,該波形采集的是超聲波的回波波形。
這些波形的趨勢,和不同材質的地面對波的吸收或發射原理不謀而合:
透過回波波形的監測和分析,掃地機的CPU非常容易辨別地面類別,以做出相應的動作決策。
所以掃地機只要合理選擇超聲波傳感器,以及加入簡單的演算法,是非常容易做到地毯的有效辨識,當然,也有部份瓷磚是一些有凹凸紋路的仿古磚、美式地磚等等,這些地磚雖然不完全平整,但透過數據學習和演算法,也很容易區別開來。
但是超聲波傳感器有一個問題,就是表面不要有臟汙,否則會影響正確辨識。











