首先,這個問題的完整 技術路線 可以參考這篇回答:fly qq:KUKA LBR iiwa 機械手是如何實作精密力控制的?
下面,我們分析一下用電流估計力矩做辨識,( 與直接用力矩傳感器相比 ),可能存在哪些影響精度的地方:
我們用電流估計力矩,基本上就是預設 電流與力矩成正比 :
\tau_m = KI
然而, 這個假設可能並不完全成立 :
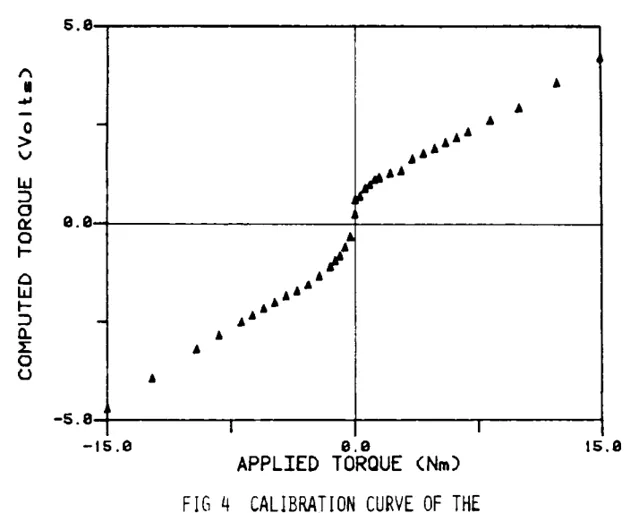 出處:Asada, H., K. Youcef-Toumi, and S. K. Lim. "Joint torque measurement of a direct-drive arm."
Decision and Control, 1984. The 23rd IEEE Conference on
. Vol. 23. IEEE, 1984.
出處:Asada, H., K. Youcef-Toumi, and S. K. Lim. "Joint torque measurement of a direct-drive arm."
Decision and Control, 1984. The 23rd IEEE Conference on
. Vol. 23. IEEE, 1984.
在零點附近,由於電機自身內部存在摩擦力,所以會有一點非線性的區域。所以,直接使用電機參數列上的力矩常數,可能會引入一點誤差。
解決辦法 :單獨對電機的電流與力矩關系進行測量與標定,得到更為精確的力矩-電流關系:
\tau_m=f(I)
在這個前提下辨識的話,可以達到如下效果:
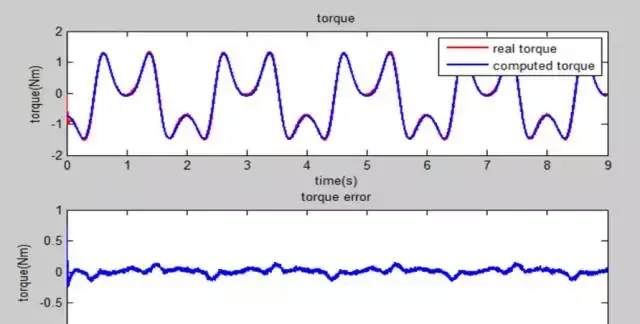 出處:我去年寫的推播:聽說現在協作機器人很火,所以我也做了1/7個
出處:我去年寫的推播:聽說現在協作機器人很火,所以我也做了1/7個
由於從電流只能估計得到電機輸出端的力矩,與機器人連桿之間還存在 減速器 ,有傳動,也就意味著存在摩擦力。
當然,常用的解決方法就是建立摩擦力的模型,然後把摩擦力模型的系數一同進行辨識。
然而,由於摩擦力形成原因未知、影響因素未知(跟速度大小、速度方向、溫度、執行時間、負載等有關?),所以要想對摩擦力進行精確建模並不容易。
舉個極端的例子,在一個大負載、行星減速器的關節上,效果入下:
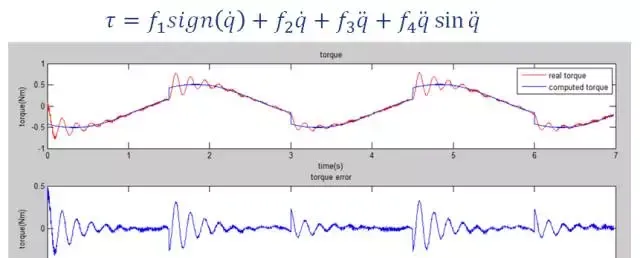
可見,機器人在關節換向的時候摩擦力大小會發生震蕩,給定的摩擦力模型無法擬合這種波形。
後來分析,行星減速器的齒隙比較大,換向的時候首先要消除回程差。這時候相鄰齒輪之間就會發生碰撞。這個碰撞就不是簡單摩擦力能夠表達的了。
還是那句話: 摩擦力的話,入坑需謹慎 。











