謝邀。
其實人造肌肉這個名字起得不是很好,更妥帖的名字應該叫電活性智能材料。因為我是做水下機器人方向的,所以接下來的舉例我就以水下機器人為例了。
對於電力驅動的機器人的驅動機構(actuator)來說,大體可以分為兩種:一種是純機械驅動,一種是智能材料驅動。
純機械驅動自然就是依靠數碼舵機,步進電機這些直接依靠機械結構的配合與運轉來驅動機器人身體部位的運動。智能材料驅動就是依靠類似於SMA (shape memory alloy)、EMA (electromagnetic actuation)、IPMC (ionic polymer metal composite)這些智能材料通電或者溫度變化的產生的形變產生驅動力進行運動了。但是智能材料的形變量真的是太小了,精度也不夠,所以很遺憾的告訴你,所謂的人造肌肉在機器人領域的適用範圍真的很小。
下面我就以IPMC (ionic polymer metal composite)為例,稍微說明一下。
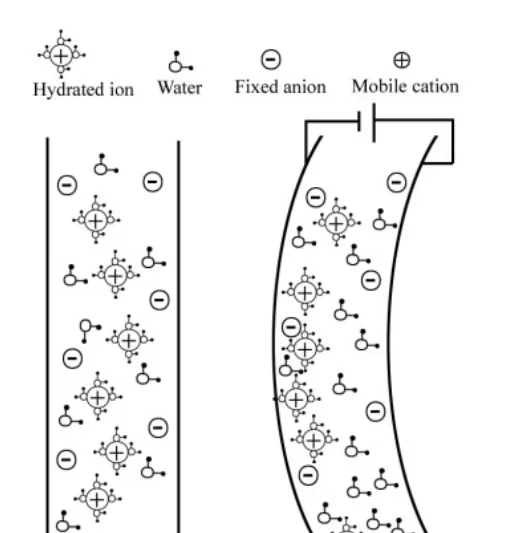
IPMC這種材料的特點就是,你只要對它通電,它就會產生形變,一般是對IPMC厚度方向施加電壓時,IPMC會向陽極彎曲,原理見下圖。那人們當然就可以利用這個特點,通電——形變——驅動,把他用在機器人身上,讓它產生相應的運動咯。而且這種材料「體積小,質素輕;產生大運動而不需要軸承和滑動部件;驅動電壓低」(百度百科),當然要好過電機什麽的了,那個大的個頭多占地方。
但是這個肌肉的的另一個特點與機器人控制上的一個重要需求有所相左,就是控制上不太好操作。一個數碼舵機只要給一個占空比我就能讓它轉到我需要的位置,但是IPMC的形變卻是一個非線性過程,需要我一點點的標定才能最後投入使用。而且他的形變量也十分有限,最大了從直的狀態彎成九十度,而且還有一個弧度,不甚理想。
所以這樣的智能材料可以用在控制精度不太高的地方,例如我想控制一個機器人,讓它模仿水母的噴射式推進模式一張一縮的,也不需要非得控制到張開多少,收縮多少,只要能張縮,讓機器人遊起來就行,這樣的領域智能材料倒是可以占據一席地位。Virginia Tech 就利用IPMC做出了一個仿生水母,但是速度只有0.77mm/s,大家感受一下。
總而言之,大多數的機器人控制中,控制精度是一個重要指標,而且鑒於運動範圍比較小,所以所謂的人工肌肉並不能得到大面積的使用。
圖片來源:Bhandari B, Lee G Y, Ahn S H. A review on IPMC material as actuators and sensors: Fabrications, characteristics and applications[J]. International Journal of Precision Engineering & Manufacturing, 2012, 13(1):141-163.











