最近很多互聯網車企慢慢普及了類似自動駕駛的高級輔助駕駛功能。很多消費者和用車人感覺小範圍內還是很成熟了。未來如果全面普及,出行會帶來什麽樣改變?
其實小星覺得當務之急是如何規範自動駕駛功能,讓其不要非預期地導致事故,從而嘗試去實作零傷亡事故願景。
最近多起和自動駕駛相關的致命交通事故讓大家對自動駕駛技術給予了更多的關註。而在英特爾旗下Mobileye在CES2019的演講中提出了除了常規功能安全以外的名義安全(Nominal Safety)概念。也就是安全設計不應該非預期地導致事故。它恰恰針對的就是汽車自動駕駛中的人機互動挑戰。
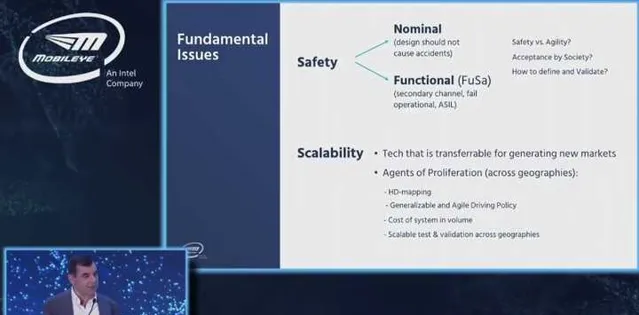
↑英特爾旗下Mobileye提出了名義安全(Nominal Safety)概念
整個背景來源於瑞典政府提出的Vision Zero願景,也就是2020年達到零傷亡事故的目標。為了實作這個願景有兩個途徑。一個是嚴格交通規則,比如將城市道路限速從時速50公裏降到30公裏。很明顯這將大大降低道路的通流能力。另一個途徑就是增強駕駛輔助系統ADAS的能力從而避免事故。
而目前的AEB緊急剎車避免了約64%同向跟隨追尾事故。但是還有一部份事故無法避免是因為AEB系統是一個緊急安全系統(透過1.5g的減速加速度緊急剎停)。並且這樣的緊急安全措施可能在實際中產生蝴蝶效應導致後車的追尾或者連環事故。
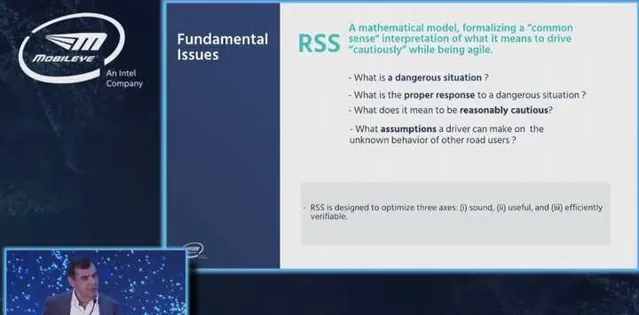
↑RSS對人的合理響應共識做出了說明
而為了更有效的避免事故,具有預防特性的ADAS系統將是未來的發展方向。對應的ESC電子穩定系統就是一個典型的預防式安全系統。它只在車輛發生側滑的時候介入。並且其幹預是相對柔性的。大部份駕駛者不會有明顯感知。而且如果使用者需要,可透過一定的操作關閉ESC系統的幹預。
Responsibility Sensitive Safety (RSS)責任敏感的安全機制。它的核心機制:
1. 說明了人如何理解「警示」。
2. 說明了怎樣的基於事故的RSS決斷可以達到避免事故目標並不被人感知。該種決斷稱為Utopia(也就是烏托邦,看來是一種理想化的結果)。
3. 說明了怎樣的決斷可以使的駕駛比較靈活,而不是過度保守而為了安全舉步維艱寸步難行。

↑基於RSS決斷機制的ADAS能否帶來道路安全的革新相關論文
關於基於RSS決斷機制的駕駛輔助系統ADAS能否帶來道路安全的革新和零傷亡事故,英特爾旗下的Mobileye發表了相關論文進行論證。該論文說明了,透過數學公式的論證,相關的預防性剎車控制可針對不同剎車曲線切實可行的操作(更少為人感知)。並且在普遍基於RSS響應機制的環境下不會產生連環事故(更符合人的判斷)。

↑基於RSS機制的預防式剎車控制系統的決斷過程
RSS將分為兩個階段
階段1--預防式剎車系統Automatic Preventive Braking (APB)
基於RSS機制的預防式剎車控制系統能夠更好的應對目前ADAS駕駛輔助系統的設計難題--false positive虛報/false negative漏報之間的權衡。傳統ADAS系統參照通行的安全規範必須偏向false negative,也就是寧願漏報不要虛報。其背後是為了和現有的駕駛系統相相容和保證可用性的妥協,但也造成了某些特定事故無法得到避免。

↑基於RSS決斷的自動駕駛合流控制(頂視視角)
階段2--全方位的事故避免系統
當車輛進一步配備了全方位的感知系統(360度網絡攝影機和雷達/激光傳感器)以及基於眾包采集的高精度地圖(crowd sourced HD map),采用RSS機制的ADAS/AD決斷系統將能夠理解人的響應共識,從而像人一樣融入多樣變化的路況。比如當交通合流的時候,RSS決斷機制避免車輛在插隊面前停滯不前,而是基於人對安全的共識平順的讓行和插入車流。

↑基於RSS決斷的自動駕駛合流控制(車內視角)
如上介紹,我們討論了名義安全概念如何避免安全設計非預期地導致事故以及RSS自動駕駛決斷在實作零傷亡事故願景的可行性。最近多起和自動駕駛相關的致命交通事故讓大家對自動駕駛技術給予了更多的關註。但我們不該杯弓蛇影而是用更全面的革新來應對挑戰。
參考文獻:Vision Zero: Can Roadway Accidents be Eliminated without Compromising Traffic Throughput?











