謝邀
第一次回答問題,不太懂規矩,先給出我的答案吧:沒有
由於我自己是在四足機器人領域,那麽我就從四足機器人領域來說說這個公司的工作以及國內的現狀吧。
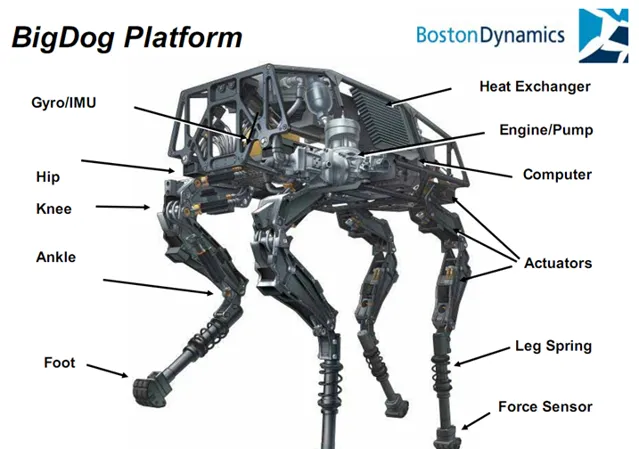
說實話,我雖然自己是研究四足機器人的,但我知道Boston Dynamics(BDI)也就從2010年開始,可能和大多數人一樣,是看到了該公司釋出的大狗(BigDog)[1]四足機器人影片。BDI於2008年釋出了大狗的影片,引起了國內外的廣泛關註,可以說是一炮而紅。其公司老板以及專案經理是原MIT Leg Lab的大牛Marc Raibert。這個人在80年代發表的論文基本奠定了BigDog的技術基礎[2-4]。
從技術角度看,BigDog的底層控制技術並不能算非常的高級。BigDog專案組曾經來我們學校進行過學術交流,從其公開的技術資料看,其底層控制主要包括:
1)液壓伺服控制;
2)步態曲線生成
3)主被動柔順性控制;
下面就我了解的內容簡單說一下上面三點。
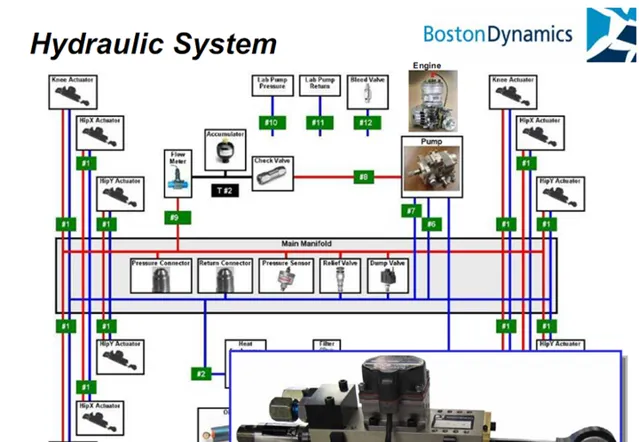
首先是液壓伺服控制。BigDog給看影片的觀眾帶來的第一個震撼效果或許是它的協調性和適應力,因為畢竟目前機器人能像動物一樣行走在各種路況下在這之前確實令人難以想象。但是,作為研究人員,看到BigDog我的第一個疑問是:我靠,這得多大的驅動能力才能帶得動這麽大的負載?而這個問題的答案就是液壓伺服控制。在這之前,幾乎所有的機器人都是由電機驅動的,因為電機驅動易於實作,不需要考慮油源、油路等問題,接上電線就能轉。但是,電機驅動的問題就是功率體積比太小。也就是說,同樣大小的驅動機構,以電機與液壓缸為對比,電機的輸出功率相比液壓缸而言非常的小。比如,要帶動同樣100kg的負載,液壓缸可能只需要一個鉛筆盒大小,而采用電機的話或許已經快跟BigDog的軀幹一樣大了。所以,采用液壓缸作為執行機構是增大負載能力的關鍵。由於之前沒有人想到將液壓缸用在機器人上,因此BigDog一出,連我們導師都顯得有一些遺憾,他說,我們搞了這麽久的液壓,怎麽就沒有想到把液壓用在機器人上呢?當然現在做還不算特別晚~~。由於液壓伺服控制也算是老技術了,非常的成熟,因此這一點對於BDI或者國內的研究高校來說應該不是難點。下圖是BigDog的液壓系統詳情。
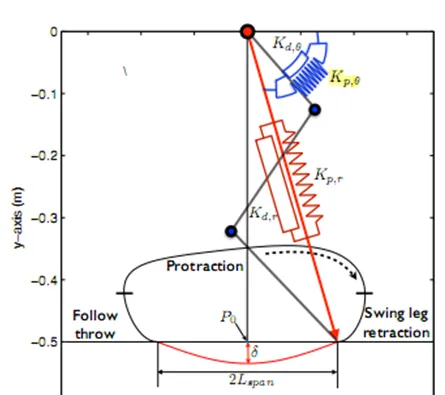
其次是步態曲線的生成。相信看過影片的同學們都對BigDog被踢一腳這件事情記憶猶新。對BigDog側面方向施加橫向擾動,機器人仍舊能夠保持平衡,這首先是一個頂層的姿態規劃問題,這裏只說說底層的控制問題,也就是步態的問題。步態的問題可以說是BigDog裏面的技術難點,因此BDI也從來沒有透露過步態的任何細節。到底它采用的是何種步態曲線(擺線?貝茲?),是否使用了中樞模式發生器(CPG),如何解決自由度冗余等等問題目前我們都不知道答案,只能靠自己的理解在自己的平台上進行試驗以看效果。這還只是正常行走時的步態,在不同路況下,不同外力擾動(比如被踢一腳)下,不同行走速度下如何進行步態的切換,切換成何種步態更加是難點中的難點。因此,在這個方面,可以說我們國內還沒有任何一家機構做出的機器人能與之匹敵。下圖為利用貝茲曲線設計的足端步態軌跡。
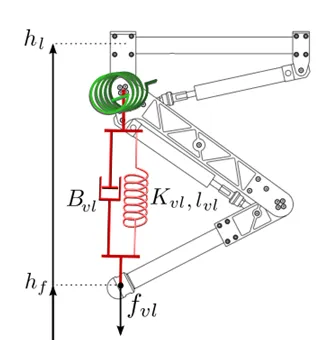
最後講一講主被動柔順性控制。可能大家看到這個詞根本不知道是啥意思,不過不要著急,聽我解釋。簡單的講,機器人要走路是不是腳首先要著地啊?腳著地了是不是就會產生力?產生力了機器人是不是就會受到反作用力?如果反作用力太大了是不是機器人就走不穩啊?就這麽簡單。主被動柔順控制的意思就是透過主動和被動的方式去減小接觸力,以保證機器人的行走更加穩定。其中被動柔順意思就是這個力的減小是被動的,無法調節,那麽怎麽個被動法呢?其實就是足端安裝的彈簧。大家息怒,我也不想繞了一圈最後告訴大家那根破彈簧就是被動柔順,實在是。。。。。這樣不是顯得高大上麽~~哈哈。當然,這麽說還是有好處的,可以幫助大家理解啥叫主動柔順。主動柔順透過上面的講解,肯定大家也就知道了,不就是透過主動的方式去調節接觸力麽,相當於一根可以變剛度的彈簧。事實就是如此,可以簡單的理解主動柔順為可變剛度的彈簧,當然,只有彈簧我們就會發現問題,我就不展開了,反正我們最終將其等效為了可變的彈簧阻尼系統,如下圖。因此,透過主動和被動的結合,整個機器人的腿就等價成了彈簧和阻尼,從而觸地的過程吸收了接觸力,使得機器人更加的穩定。那麽這個技術難不難呢?答案是不難,因為我們目前已經實作了,但是又不簡單,因為實作的還不是特別好。觀察仔細的同學可能能看出來BigDog的腿在觸地的過程中會上下抖動一下,說明他們的主動柔順也沒有做到特別的完美,但是只要能保持上平台的穩定就已經足夠了。
另外,底層技術除了控制方法以外,還包括機器人的架構問題,比如機械結構問題、液壓油路設計問題、傳感器配置問題、能源供給問題、散熱問題等等。可以說,一個四足機器人就是一項系統工程,其中的任何一項不合理或者不合格都將導致整體的失敗。以大狗的發動機為例,它體積小質素輕功率還大,所以大家也就可能猜到了,對中國禁售~~~我們自己買到的發動機都五大三粗的,哎,讓我哭會兒去。因此,這也是這個專案很難復制的關鍵所在。
對底層技術講得有一點多,那是因為這些我都有所涉獵。機器人的上層技術我還沒有搞到,因為底層還木有做好。。。。囧了~~~~。但是根據我的理解,頂層技術主要包括的內容是機器人的平衡控制(防滑,防倒等),地面估計(各種路況的獲取),路徑規劃(找路),避障等等。每一項內容要實作都不容易,由於不太了解,就不講了。
下面再說說題主關心的問題,國內做的怎麽樣?有沒有能與之匹敵的實驗室。這裏,我將我知道的國內做BigDog的實驗室研究生列出,主要參考是2010年國家的863計劃先進制造領域釋出的「高效能四足仿生機器人」主體專案指南,共有五所高校參與[5],包括
北京理工大學[6]:
山東大學[7]:

哈爾濱工業大學
國防科技大學:

上海交通大學:
這五所高校均於2013年1月在國家地震緊急救援訓練基地進行了行走實驗,完成了砂石路、礫石路,上下坡路等地形的行走。影片就不貼了,反正效果不是很好,基本只是解決了有無問題,不過無論如何,小步快走還是可以走的,偶爾漏個油啊,發動機過熱熄火啊等問題大家就別記在心上了。
當然,隨後大家還是回去繼續加油,繼續完善,現在這裏面做得比較好的應該是山大的機器人。後來,兵器201也加入了做大狗的行列,而且據說做得很好,已經能夠被踹一腳不倒了,不過還沒有機會去參觀,有老師說帶我們去,至今木有訊息。。。。。
大概就這些吧。至於國外的其他四足機器人,已經有人回答了,不過值得一提的是意大利IIT做的HyQ[8],其柔順性控制做得非常好,完全采用主動柔順控制,摒棄了被動的彈簧,是唯一能夠和BigDog媲美的四足機器人了。而且我感覺BDI也借鑒了HyQ的思路,因為從BDI最新的四足機器人SPOT可以發現,它也去除了足端的被動彈簧,使用完全主動柔順控制,帶來的好處是機器人的控制更加平穩,但是要求執行機構的響應更快了。
就說這些吧,自己沒做好就看看別人做的解解饞了~~
參考文獻:
[1] M. Raibert, K. Blankespoor, G. Nelson et al. Bigdog, the rough-terrain quadruped robot[C]// Proceedings of the 17th World Congress. 2008: 10823-10825.
[2] M. H. Raibert, Legged robots that balance : MIT press Cambridge, MA, 1986.
[3] M. H. Raibert. Legged robots[J]. Communications of the ACM, 1986, 29(6): 499-514.
[4] M. H. Raibert. Running with symmetry[J]. The International journal of robotics research, 1986, 5(4): 3-19.
[5] 王立鵬, 液壓四足機器人驅動控制與步態規劃研究[D], 北京理工大學, 2014.
W. Lipeng. Research on Control and Gait Planning for a Hydraulic Quadruped Robot [D]. Beijing Institute of Technology, 2014.
[6] G. Junyao, D. Xingguang, H. Qiang et al. The research of hydraulic quadruped bionic robot design[C]// Complex Medical Engineering (CME), 2013 ICME International Conference on. 2013: 620-625.
[7] 柴匯, 孟健, 榮學文 et al. 高效能液壓驅動四足機器人 SCalf 的設計與實作[J]. 機器人, 2014, 36(4): 385-391.
[8] C. Semini. HyQ—Design and development of a hydraulically actuated quadruped robot[J]. PD Thesis, University of Genoa, Italy, 2010











