謝謝知乎圓桌會議的邀請。
最近這兩年裏身邊越來越多的人談論人工智能。倉儲物流行業裏也越來越多的談到智能倉儲,智慧物流。網上流傳的各大電商倉儲物流中心的宣傳影片裏有各種黑科技器材和系統。在工廠裏,也有很多智能化搬運器材在不同工位之間進行物料的轉運作業,常見的有連續搬運器材比如各類輸送機等,也有非連續性的離散搬運器材,比如:
柔性無軌搬運類器材
 https://www.zhihu.com/video/1058318066148048896
https://www.zhihu.com/video/1058318066148048896
有軌域搬運器材
 https://www.zhihu.com/video/1058318518239506432
https://www.zhihu.com/video/1058318518239506432
這裏先不談高大上的人工智能技術,首先總結下影片裏的各種搬運器材是怎麽做到器材自身行走到正確的位置並完成存取貨物的?因為這可以看做是搬運器材的第一步智能。
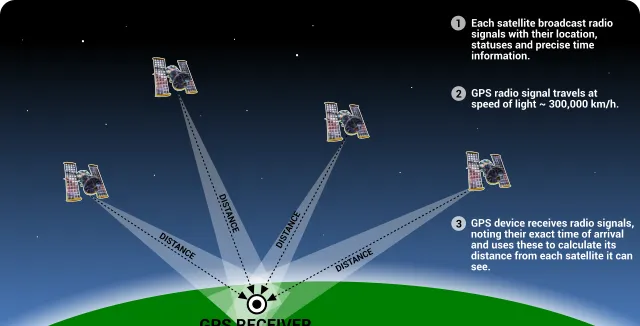
自動搬運任務,首先要知道當前任務的起始地址和終點地址。電腦系統要能辨識物理世界存在的具體位置地址,那就需要將位置資訊轉化成電腦能讀懂的數碼資訊。對於位置資訊數碼化大家最熟悉的可能是全球定位系統GPS。GPS系統將地球上的任何一處的位置資訊都可以分解成唯一的數據組合:經度,緯度,海拔高度。比如,東經45°,北緯32°,海拔1000米,這三個數據的組合就對應了地球上唯一的位置。也就是說給電腦系統輸入這三個數據組合,電腦就可以給汽車指出這個在物理世界的實際位置。
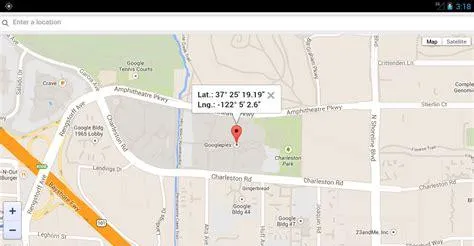
在百度地圖裏就是這樣的過程,我們看到的地圖中的每一個位置資訊背後其實都對應著一個上邊所述的經緯度資訊,而我們不擅長記這些數據組合,改成給每個位置都起個名字,比如景點名,公園名,小區名,商場名。但是每次我們查詢時輸入地面後,電腦系統仍然首先要將地名轉換成經緯度數據後,再去對應到地圖中的實際位置。
GPS的位置數據是是可以定位到地球上隨意的一個位置,也就是說GPS數據是連續和全面的,是整個物理世界所有位置點的定位。而在倉儲物流中心裏,大部份的情況下,搬運器材經常是在固定的幾個位置之間來回搬運,比如堆垛機在前後方向上只有固定的庫端月台位置,前後每列貨架的位置;堆垛機在上下方向上,只有固定的每層貨架的位置。不管堆垛機對應的貨架有多少列多少層,堆垛機在執行時只會在每個貨格位置處作業,而不會在沒有貨格或者貨格之間位置處無效作業。那這樣的位置定義就是有限離散性的定位。通常是給所有的作業位置設定固定的編號,如果這些位置是遵循一定的規律的,那位置定義可以參考這些規律,比如貨架中每個貨格的位置定義可以按照層列排規律來定義,比如按照數據組合(2,3,4)即為貨架中的第2層,第3列,第4排。而這個位置是固定且唯一的,如果電腦將這個數據組合發送給自動化搬運器材,那搬運器材就可以準確的知道這個數據組合是說的哪個位置。

解決了搬運位置的數碼化問題,那對於搬運器材來說下一步就是執行到指定的位置,那搬運器材下一步要就解決的問題就是要即時的知道自己當前所在的位置,即尋址定位問題。
人肉定位技術
在任何有廠內物流工作發生的地方,必然會見到叉車這種器材。有人說叉車是最不智能的,最機械的器材。其實從另外一個角度來看,叉車是最智能的搬運系統。為什麽?因為叉車需要人的駕駛才能搬運貨物,而人是這個星球上某些方面最智能的系統。駕駛員接到搬運指令後,分析和判斷即將要做的搬運任務的起點和終點位置。駕駛員得知其實位置後,首先要判斷叉車當前位置與目的地址的關系,目的地址如果位於前方,那駕駛員超前駕駛,目的地址如果位於後方,駕駛員朝後駕駛。同時駕駛員要在駕駛的過程中,不斷的判斷叉車當前的位置和目的地址的關系,直至到目的地址位置。在駕駛員駕駛叉車的這個工程中,叉車的定位尋址是由駕駛員的超級智能電腦---人腦來完成的。駕駛員的眼睛是視覺傳感器,將當前位置資訊傳給人腦即時進行位置分析判斷;駕駛員的手和腳就是執行機構,人腦傳達指令給手和腳來控制叉車的前進後端和叉車的轉向直至到達最終目的地。

AGV自動導引小車定位
由於AGV系統獨特的柔性,可以在廠內和配送中心輕松的完成部署。目前AGV在國內各個行業的工廠和配送中心套用的越來越多。AGV的導航定位技術有很多種,最常見的有如下幾種
1.磁導引
最早的AGV是基於磁導引技術來實作的,需要在AGV的所有可能的行走路線中提前沿著路線布置磁條或者在地面預埋磁釘。AGV的車上有裝有磁感應傳感器,AGV只能沿著磁條執行。AGV車上的磁感應傳感器會一直與地面的磁條發生感應並即時判斷感應值,隨著感應值的動態變化,AGV調整自身的角度保證車體往前行進的過程中一直沿著磁條路線不跑偏。能保證AGV在固定的路線上走解決了定位的第一步,而AGV具體當前行走到了這條路線上的那個位置點上,通常是由AGV與車輪耦合連結安裝的編碼器來確定的。AGV行走時編碼器也隨著車輪的行走即時反映行走的距離,一般AGV會有一個起始點,這樣有了起始點,有了固定路線,有了行走路程值,完全就可以確定AGV當前在什麽位置上。

2,激光導引
傳統的磁導引AGV系統,一旦安裝偵錯後,AGV只能沿著固定的磁條進行,如果有要增加的工位或者某些路線要改變,那就需要重新安裝磁條,如果是磁釘需要重新在修改的地面上打入磁釘,因此磁導引AGV柔性比較低。隨著導航技術的發展,目前在叉車AGV上廣泛的套用了激光導航技術。在激光AGV行走的區域內簡單安裝若幹激光反光板即可完成AGV部署工作。AGV車身上安裝旋轉的激光掃描器不停的進行360度旋轉掃描,激光光線打到事先安裝的激光反光板上,就可以得知激光與這些反光板之間的精確距離。在AGV行走範圍內,只要保證能同一時刻能有3~4個反光板有反射就可以透過復雜的定位演算法來確定當前AGV對應的實際位置。

3.二維碼定位
亞馬遜配送中心的Kiva機器人以其突出的創意和卓越的優點在倉儲物流界大火了一把。國內也有不少公司研發出來類似的倉儲搬運機器人並已經投入實際套用中,主要集中在電商行業的訂單揀選場景中。Kiva機器人采用慣性導航和二維碼定位的方式來控制每台Kiva機器人在倉居里正確的執行。Kiva系統需要事先在地面上貼附二維碼標簽,所有的二維碼標簽在Kiva機器人工作範圍內組成一個標簽矩陣網,每個標簽上都有唯一的資訊,也代表了整個標簽所在的整個矩陣網絡裏的座標。

Kiva機器人車身安裝有一個高分辨長焦網絡攝影機並一直朝地面即時拍攝。當Kiva機器人經過地面的二維碼標簽時,網絡攝影機會讀取到二維碼裏內含的座標資訊,也就知道了當前Kiva機器人身處何方,同時二維碼影像中特有的邊角位置,可以被用來調整Kiva機器人行走的角度,從而保證Kiva機器人的精確走向。

以上談的是目前AGV幾種非常常見的定位方式,而在倉儲物流中心裏很多成熟而傳統的器材是有軌域的,也就是非柔性的器材,這種搬運器材由於路線是沿著軌域且固定的,所以定位技術和原理要有所不同。
1,認址傳感器
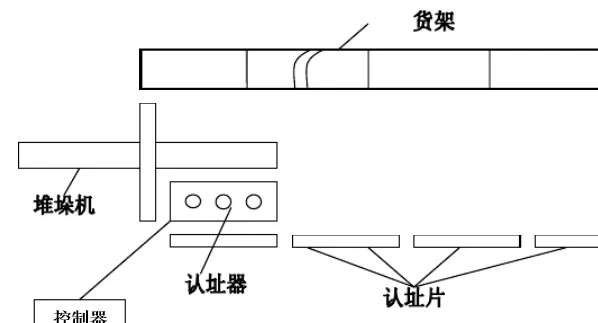
說起有軌域的搬運器材,最有歷史、最成熟、套用最廣的器材就是立體居里的高速堆垛機。堆垛機在執行時由於一直沿著固定軌域行走,所以就可以在堆垛機機身上安裝一定的傳感器同時配合軌域上安裝一定的機構,這樣每次堆垛機經過這些機構時透過傳感器的變化就可以知道當前位於那個軌域區域範圍內。堆垛機水平方向上,這個傳感器就叫做認址傳感器,沿著軌域安裝的機構叫認址片。由於水平方向上堆垛機需要準確定位的是要存取貨的位置,及庫端進出庫輸送機位置和貨架每個貨格對應的水平位置,這樣沿著軌域方向上在每個貨格和輸送機位置上安裝好固定的認址片,堆垛機每次經過這些認址片的時候,傳感器會有訊號的變化,堆垛機從起始點開始執行,隨著傳感器變化的次數,就可以知道堆垛機當前位於哪個貨格的位置、那兩個貨格位置之間。堆垛機垂直的方向有時候也是按照這種方式來完成高度方向上的定位。


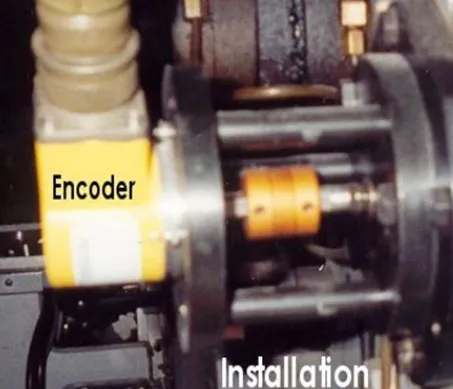
2.旋轉編碼器
以上說的認址傳感器定位方式是屬於離散式的定位,堆垛機只能知道當前跑到了那兩個認址片之間,卻不知道跑到兩個認址片之間的具體哪個點的位置上。旋轉編碼器就是一種可以輸出連續位置的定位傳感器。一般旋轉編碼器會安裝在前後行走機構的輪子的軸上,搬運器材行走時輪子轉到帶動旋轉編碼器值發生變化,這樣從起點開始,往前行走1米就對應旋轉編碼器值X,這樣按照對應關系,透過旋轉編碼器值就可以間接的計算出搬運器材行進了多少米,也就完成了器材的定位。旋轉編碼器可以用在器材沿直線行走的布局也可以用在器材有沿著彎道行走的布局。
3.激光測距儀
目前立體倉居里用認址片定位的傳統方式越來越少,取而代之的是用激光測距儀來給堆垛機定位。激光測距儀也是一種連續定位方式,且精度非常高。通常是將激光測距儀安裝在堆垛機機身上,在直線軌域的一頭安裝有激光反光板,反光板的位置要能保證激光測距儀在堆垛機全程行走過程中都能將光線投射到反光板上。激光投射到反光板時根據光線回路時間就可以間接計算出測距儀距離反光板的距離,也就間接可以計算出當前堆垛機在固定軌域上的即時位置。由於激光的光線是直線,所以激光測距儀通常用在直線軌域執行的自動化搬運器材上。


4.條碼定位儀
目前在固定軌域上行走的搬運器材上還有另外一種定位方式叫條碼定位技術。這種條碼定位技術與上邊談到的二維碼定位方式有一些共同之前,即都是讀取提前安裝好的條碼標簽,不過此處所說的條碼是連續讀取的,即條碼本身是沿著軌域通長的一整條,在搬運器材上對應安裝一枚特殊的條碼閱讀器,這樣搬運器材在沿著軌域行走時,條碼閱讀器會一直連續讀取這個特制連續條碼,條碼值對應一定的距離值,搬運器材這樣就可以即時獲取到當前在軌域上的位置了。

以上分享的是在倉儲物流中心和廠內物流中心常見的自動化搬運器材的幾類定位方式。目前市面上的搬運器材營運的新技術越來越多,定位方式也層出不窮,比如激光掃描孔定位,SLAM演算法自定位,其他感應傳感器定位等等。不管用哪種方式,解決了自動定位問題,對於自動搬運器材才可以在此基礎上解決路徑規劃、速度控制等問題。











