近日,有位对技术一窍不通的朋友说想买特斯拉,因为它配备了 「你站着不动,让车来找你」 的自动驾驶功能。
我大吃一惊,这让人感觉到:自动驾驶虽然暂时还只是从业者关注的话题,但 也许用不了几年,就会成为影响普通群众购车决策的关键因素 。
既然如此,作为普通人也有必要提前了解一下自动驾驶的关键技术,但没必要像从业者那样了解得那么细致。本回答就 面向普通群众作一个通俗易懂的介绍 。
自动驾驶需要什么技术?
自动驾驶需要什么技术?要回答这一问题,其实没必要翻开书本,只需要回想一下平时咱们是怎么开车的:
什么是自动驾驶?
——就是 全部或部分替代 这些本来由人来执行的功能。
自动驾驶需要哪些技术?
——自然而然地,需要 环境感知 、 行为决策(广义) 与 车辆控制 技术。
那么,哪项技术在当下的技术门槛最高、最关键呢?
首先,我们可以将 车辆控制技术 排除在外。这并不是说车辆控制技术简单,L1级自动驾驶只能帮驾驶员自动加减速或自动转向,进步到L2级的「同时实现加减速和转向」,也是花了汽车行业好长时间。
但是,它总体上是一个机电控制的工程问题,相关技术与供应链基本成熟;虽然高阶自动驾驶出于安全性考虑,未来还会有制动和转向的冗余备份要求,总归是逃不出工程领域,而工程问题终究是能解决的。
其次,至于行为决策(广义),像路径规则这种功能,导航软件已经做得比人还好了;在环境感知做到绝对正确的情况下,什么时候加速、什么时候刹车、什么时候转向的决策,也并不难(可能还涉及到一些法律与伦理问题,不属于技术领域)。
如此一来,剩下的就是环境感知了。 环境感知对于汽车行业是一个新的挑战,也是实现自动驾驶最关键的一步,是最重要的环节 。
环境感知的两种技术路线
正是因为环境感知太难实现,才引发了技术路线上的差异。最有意思的标志性事件,是特斯拉的创始人马斯克在发布自家Autopilot 3.0的时候,扔出一句颇具争议的话,炮轰了大半个自动驾驶行业:
「 激光雷达太蠢了,谁依靠激光雷达谁就会完蛋。(Lidar is a fool. Anyone relying on lidar is doomed)」。

激光雷达(Lidar)是什么?马斯克为什么这么说?
要回答这一问题,就要提到自动驾驶环境感知的两大技术路线: 弱感知+超强智能 vs 强感知+强智能 。
一、弱感知+超强智能
马斯克在发言中坚持的 弱感知+超强智能 技术路线,是指 主要依赖摄像头与深度学习技术 实现环境感知,而 不依赖于激光雷达 。
这种技术路线有点仿生学的味道:既然人可以靠一双眼睛就可以开车,那么车也可以靠摄像头来看清周围环境。对于把第一性原理当成颠覆式创新秘诀的马斯克来说,坚信这种技术路线可以说是意料之中。
我也很喜欢这种具备自然美感的技术路线,但问题在于: 超强智能何时才能实现?
要知道, 技术路线之争要讲究商业化的节奏与速度 。一百年前,内燃机没有电机的电磁学简洁美感,但内燃机汽车还是打败了电动汽车;十几年前,等离子电视并非一无是处,但还是败给了液晶电视。
现实问题是,深度学习现在还停留在尴尬的「识别」阶段。就比如,发表在Nature上的「Why deep-learning AIs are so easy to fool」一文 [2] 举了一个例子: 特征非常明显的一个「STOP「标志,变换角度之后就被AI识别成了哑铃(Dumb-bell)与球拍(Racket)。
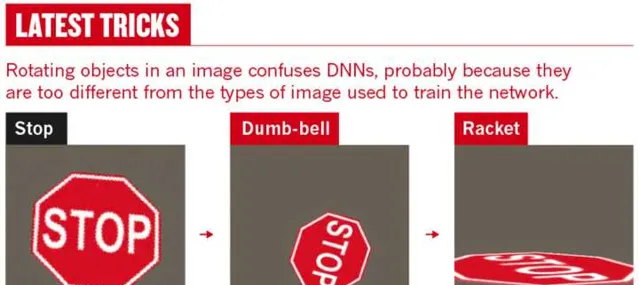
这就很僵硬了。这样的识别结果,怕是还不如隔壁村的二傻子吧?
所谓的「弱「感知与「超强「智能都是相对的。我们觉得人类眼睛的视觉很强了,是因为就 连再愚钝的人类也配备了超强智能的识别能力 ,只是大家习以为常、没有留意而已。
上述情况还是在光线良好的情况下,如果是夜晚、大雾、雨雪的条件下,识别效果还会再打折扣。发生在美国的特斯拉撞大货车的那次「事故」,就是因为摄像头在强反光的情况下把白色的大货车识别成了天空。
识别能力尚且如此,那后续的行为预测与逻辑推理就更是无源之水了 。因此,当前水平的深度学习,离人类的「超强智能「还是有差距的;至于什么时候能达到甚至超过人类的水平,不知道。
在深度学习技术的进步速度存在诸多未知的情况下,自动驾驶行业总不能停下来等待吧?于是,另外一个思路出现了: 如果超强智能暂时难以达到,那我们给车赋予超过人类眼睛的感知能力啊,是不是也行呢? 这就是强感知+强智能的技术路线。
二、强感知+强智能
与弱感知+超强智能的技术路线相比,强感知+强智能技术路线的最大特征,就是增加了激光雷达这个传感器,从而大幅提高感知能力。
在介绍激光雷达的原理之前,我们先通俗地打个比方:这可以说是一种 暴力解决方案 ,用千里眼把所有角落都扫一遍,理论上周围有啥都能知道;再加上稍微一点学习算法,就可以勾勒出障碍物的范围,知道车往哪里开了。
就像葫芦娃中的二娃,他不像铁娃、火娃一样拥有暴力技能,作为心地单纯、缺乏计谋 (非超强智能) 的毛孩子,通常来说碰到妖怪只能束手就擒。但事实上,凭借着千里眼的特异功能 (强感知) ,他也打了不少胜仗。

这种方法听起来有点太耿直,但在目前深度学习遇到瓶颈的情况下,这种技术路线通往高阶自动驾驶可行性更高一些。
事实上,这个技术路线上的玩家并不少,像 谷歌Waymo、百度Apollo、Uber、福特汽车、通用汽车等人工智能企业、出行企业、传统车企都处在强感知+强智能的技术阵营中 。
此外,暴力的方案往往也有一种美,比如老毛子的喀秋莎火箭炮,虽然没啥精妙的制导方法,也不需要知道敌人的精确位置,一打起来就把足量的火力送过去,保证覆盖度就行。
下图来源 [3]
对于习惯追求暴力美学的老毛子来说,这种方法 最保险 。对于人命关天的自动驾驶来说, 多一些追求保险的观念, 也不是什么坏事。
环境感知的关键传感器
无论何种技术路线,环境感知的核心都在于「传感器」(Sensor)这一古老的名词。咱们前面提到的 摄像头 与 激光雷达 ,都是传感器。
除了这俩之外,与自动驾驶关系密切的传感器还包括另外两种雷达: 超声波雷达 (Ultrasound Radar)与 毫米波雷达 (Radar)。
突然多了好几个专业名词,是不是头都要大了? 一开始我也有这种感觉,后来自己总结出一个简便的记忆方式,给大家分享一下:
关于 激光雷达的原理 ,可以理解为数字量: 一条激光过去是直的,相当于数字扫点,理论上把所有周围的点扫一遍,就能清楚知道周围环境是什么样 。
其实,对车辆造型扫描(逆向)也就是这个原理。当然,实际的工程应用中,还是有不少细节问题。前文提到激光雷达的分辨率很高,那就意味着每次只能扫了很小一块区域,这就意味着要解决两个问题:

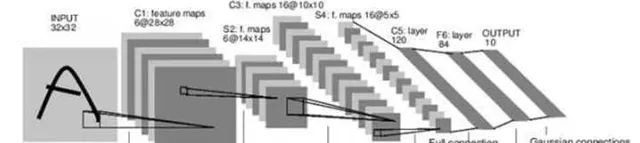
与激光雷达不同, 摄像头的采集的是像素信息 ,就和人眼看到的差不多。与人不同的是,人眼配备了超强的(人工)智能处理器,在毫不费力的情况下识别出环境中的车道、车辆、行人等等,而对车辆来说,像素信息只是无意义的海量数字,必须经过如下的抽象、重构等复杂过程,必须依赖 超强智能 才能达到人类的识别效果。
下图来源于一本非常基础的深度学习教材,我们可以看到:即便是一个简单的字符,想准确识别都需要复杂的处理过程。
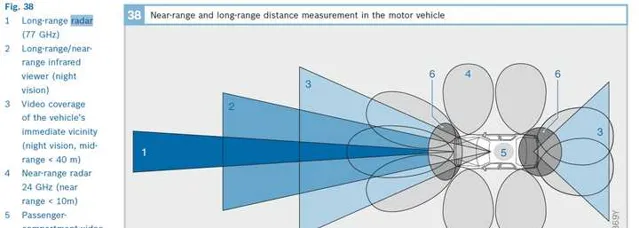
最后才提到毫米波雷达,似乎暗示着毫米波雷达不重要? 恰恰相反,毫米波雷达非常重要 :
正因为大家都需要毫米波雷达,争议比较少,才不经常拿出来被比较与提及,但这并不意味着它不重要。
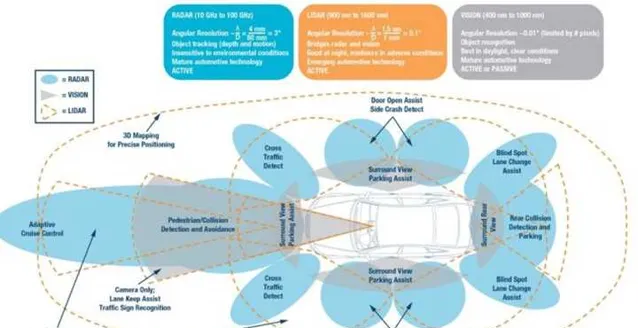
本题的提问者 @亚德诺半导体 将上述环境感知传感器放在一起,从各个维度进行了一个全面的比较,比较专业、信息量很大,有兴趣的同学可以仔细看一下。
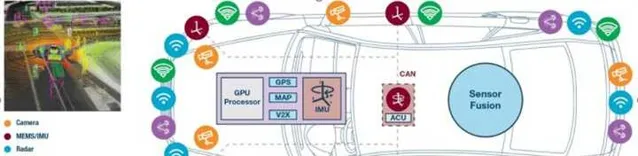
摄像头与雷达解决了「我周围都有啥「的问题,车辆还需要解决另外一个问题: 我在哪,我有多快 ?

对于日常定位与测速需求来说,单独使用GPS足矣;但对于自动驾驶来说,仅使用GPS在精度、响应速度与场景覆盖率(隧道、车库)都不够,还需要一种加速度传感器,也就是 IMU惯性测量单元 ,并通过卡尔曼滤波等方法将二者信息融合,形成最优估计。
吃瓜群众可能有个疑问,明明是测 加速度 的,为啥叫 惯性 单元呢?我们回想一下牛顿第二定律,就不言自明了: 加速度 = 作用力/惯性(质量)
好了,做一个小结,自动驾驶的环境感知需要完成以下工作:
大家都知道,自动驾驶是汽车行业的一项革命性技术,蕴含着巨大的商业价值。如果要投身到这个市场,那么问题来了 :应该投入到哪项传感器技术呢?
半导体行业领导者ADI @亚德诺半导体 的回答是: 小公司才做选择,大公司我全都做!

更详细的介绍,请移步官方机构号的这篇文章:
参考
- ^ 人的眼睛相当于什么参数的镜头? https://www.zhihu.com/question/26507130/answer/33024802
- ^https://www.nature.com/articles/d41586-019-03013-5
- ^https://www.zhihu.com/question/67311158/answer/251624746
- ^ Robert Bosch GmbH Ed. Bosch Automotive Electrics and Automotive Electrionics, System and Components, Networking and Hybrid Drive, 5th Edition. Springer Vieweg
- ^https://zhuanlan.zhihu.com/p/25131152
- ^https://www.zhihu.com/question/65799732/answer/861361221











