实际上,这位朋友想要比较的两类机器人是属于不同技术定位的两代产物,UR10的定位为协作机器人(Cobot),而楼主所提及到的这款FANUC定位为工业机器人(Industrial Robot),两者的应用场景不同,因此就带来了截然不同的技术特性。而如果仅单单比较【负载/自重】这个性能,Cobot是要吊打Industrial Robot的,形象一点说就是比较5G和4G间的传输速度,当然机器人领域的技术迭代所展现的差距并没有通信领域那么夸张。
通过下图我们可以做个简单的比较:

作者找到了有效负载同样是 10\,kg 的FANUC M-10iA/10M,来和UR10做个物理参数上的对比,其实是各有千秋的:FANUC的这款定位于点弧焊应用的工业机器人,在1)工作半径 2)可重复精度 3)关节速度上都是优于UR10的;但UR10在1)占地面积 2)自身重量上要优于FANUC,尤其在这位朋友所提及到的重量指标上,是完全吊打FANUC——33.5\,kg 与 130\,kg (和问题描述中的 200\,kg 有些许出入)的对比。
造成这个差距的主要原因是Cobot在结构设计上,【轻量化】要占据很高的优先级,因此不可避免要牺牲一定结构上的刚度(定位精度下降)、强度与可靠性,其具体通过的技术手段是:
以上谈到的这些技术特点的差异,是因为Cobot的应用定位于人机协作,更加轻量化的设计将有助于其交互(力控)性能、安全性能的提升,同时有益于降低本体实现的成本,而Cobot在定位精度、运行速度和可靠性上就没有那么严格的要求;而以FANUC M-10iA/10M为代表的Industrial Robot是定位于封闭空间的工业应用,末端重复精度高、关节速度快、工作半径大和结构可靠性佳将有助于其提高工业生产效率,而因为应用场景的封闭性,较少和人类直接接触,故对交互与安全性能的要求不高。

最后补充一下,FANUC在去年12月也推出了自己的Cobot,即Robot CRX系列(之前的CR系列很难算严格的协作机器人),如下图:
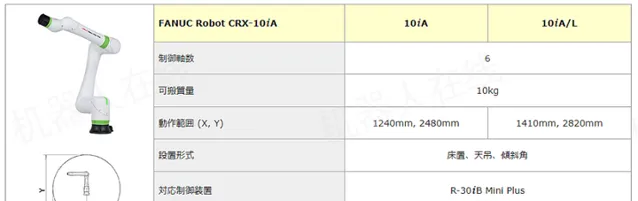
负载 10\,kg 级,工作空间 1240\,mm \&\,1410\,mm 可选,虽然目前没有透露自重,但从外观上来看轻量化的设计是做的比较出色的。拿FANUC的这款CRX去和UR10比较,才是同类产品间的较量。











