目前,中国的扫地机品牌已经称霸了全球
我做过调研,虽然我们能看到国内用户对扫地机产品的负面反馈颇多,但是国外用户对国外品牌扫地机的吐槽点只多不少。
大家好,我是 @森山,作为家电博主,这几年我发现自己的路子越走越窄,按理说自己做过20年的电子产品开发,也做过产品经理,对大部分电器电子类的产品理解和分析会相对容易,但那么多的家电品类,我偏偏最喜欢研究扫地机,而且越是去学习研究测试它,越觉得自己像门外汉,进入了一个新世界,不懂的东西太多太多,所以我策略性的减少了其他家电品类的学习时间,大部分精力又投入到扫地机这个领域里。
扫地机从研发角度来看,是一个技术合集的全家桶,宛如这个时代的工业结晶,就像中古时代的手表、收音机、电子胶片相机、Walkman等,它们在当年也经历了辉煌,汇集了当时民用领域的高精尖技术,又体现了高集成度的精密工艺,同时它也具备从高价、高门槛到慢慢普惠大众成为消费电子的特征。

从大的来说,扫地机涉及到电子、光学、化学、力学、声学、计算机、材料等学科中的应用技术。
往小了说,各种传感技术如激光雷达、导航定位、悬崖和障碍物避让,自动控制技术如温度控制、走位控制、速度和真空吸力控制,语音识别与交互,然后特别核心的视觉分析、软件算法等等,如果深挖的话,还有很多。
扫地机起源于国外,早期产品化代表为2001年 伊莱克斯推出的「三叶虫」扫地机 ,而「扫地机」这个名词,并不是国外的词直译过来的,国外现在依然叫「Vacuum Robot」,意为真空机器人,实际上这是吸尘器(Vacuum cleaner)的地面机器人形态。
在2000年初的时候,国内有一家在江苏的吸尘器厂(泰怡凯),开始组建团队研发扫地机,这个公司就是现在的科沃斯,从行业发展的角度,科沃斯确实是国内最早、而且是比其他家早了10多年投入扫地机领域的开山鼻祖和黄埔军校,在近五年国内扫地机格局形成之前,科沃斯已经贡献了非常多的产品,其中就包括2013年,国内首款搭载LDS激光雷达的地宝9系扫地机,扫地机上凸出一块的雷达,一直被沿用至今,应用在大部分扫地机上:
那些年,也只有科沃斯能和外国品牌抗衡。
按照我自己的从业经验,2008年~2018这十年,是国内消费电子应用创新井喷的十年,2016年,新一代的创新科技品牌「云鲸(Narwal)」成立,有一个懂技术又懂产品的老板,云鲸带来了能拖地的扫地机,重新定义了这个品类,实际上从那时候起,就不应该叫扫地机了,后续云鲸为了解决拖地带来的诸多问题,又做了很多第一次的创新,从现在看,也普及到了整个行业。

我认为,科沃斯和云鲸这2个品牌,在扫地机行业历史中,是具有里程碑意义的品牌。
说回开头的论点: 目前,中国的扫地机品牌已经称霸了全球。
为什么这么说?
1、一些国外的大牌扫地机已经全面退出中国市场,有的甚至已经消失,如昔日巨头Neato被Vorwerk收购5年后已经关门歇业,Dyson、三星等在扫地机领域一直没有打开,Irobot虽然还有销量,但也是被国外用户卖得最惨的品牌。
2、中国扫地机品牌全面出海:四大品牌主打中高端,子品牌、OEM厂家主打低端,全面开花,还有像Anker创新旗下的Eufy也在国外拥有大量用户。
3、从销量、技术、功能性能配置看,都处于领先地位。
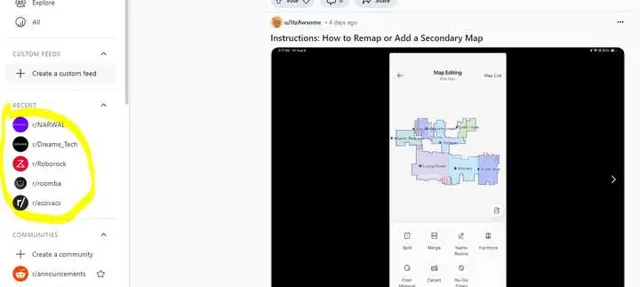
作为一个证明,我们能看到国外的顶级社交新闻站点上,都有ecovacs、dreame、narval、roborock的专属论坛,且热度比国内还高!当然售价也比国内高不少,狠狠的收割一下西方用户!
甚至在几天前,我看到一个国外用户,在自己做的选择攻略中,列出的他认为的2024年最好的5款扫地机型号,都是中国品牌:

此外,我个人主要关心技术方面,国外的三星、irobot、dyson等都略有研究,差距还是蛮明显的。
机器人应用中的传感技术、机电控制技术,国产品牌都出现了很强的个性化技术。
扫地机上的很多新技术,都是国内品牌推出的,如前面说的LDS导航、拖地功能、自清洁基站,到近2年的机械臂拖布、可升降边刷等等。
但我觉得最重要的是传感器的应用。
传感器是机器人的眼睛、嘴巴、鼻子、耳朵,它的采集性能越强,机器人的自主工作能力就越精准。
今年2024年,是扫地机行业从二维传感转换到三维传感的重要时刻。
二维传感、三维传感的说法,是我自说自话,大概就是这么个意思,具体可以看我1年多前写过的文章:
其中,有两款最具典型代表意义的产品。
第一款,石头V20,它采用了真正3D-ToF的面阵激光模组
它最大的意义在于机器顶部没有雷达了,一马平川,大快人心,且导航定位避障性能不下降。
雷达没有了以后高度降低至82mm,是主流扫地机的最低高度,进出低矮空间更容易,此外,没有了机械式激光雷达,后期故障率会降低。

来看看它工作时射出的光束:

这是一种非标的,很有巧思的光电方案,它会分时分策略的检测:麻点状的点阵光,强度高距离远,是用于建图和导航定位;均匀发散的面光源,强度弱距离近,用于避障。
所以它的前光学模组是非常复杂的:

其中Spot光源(点阵光源)的有效距离0.1米~10米,前后双模块的单次采样直径接近20米,主打建图导航;Flood光源(面阵光源)的有效距离为0.05米~1.5米,也符合避障的近距离需求。
RGB普通摄像头+Spot融合采集时,还能建立物体的三维信息,更好的判断家居环境:

我在3年前做过RGBD相机的开发,小小一个模组,几十个人的开发团队,对光学、硬件、软件、算法都有很高的要求,还得考虑功耗、散热、帧率分辨率等细节,它这个确实难度极高,石头的产品经理曾告诉我,为了这个方案,他们准备了4年。
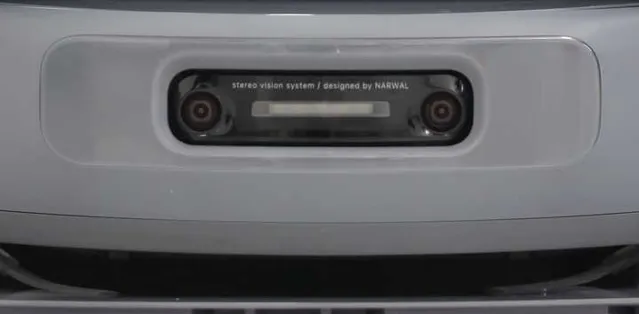
第二款,云鲸逍遥001,它采用的是双目视觉方案
最大的意义在于,行业多年对线缆无法准确检测避开的顽疾被攻克了。
以前,做测评的时候,看到很多测评博主的无奈之举,因为真的无法准确检测到细线,就只能用这种擦边球的测试方法,把线揉成团,来降低识别难度,提高避障率:
而现在云鲸逍遥001可以这样测:
对用户来说,使用扫地机的时候顾虑就少了很多。
双目方案的原理,和人的双眼类似:
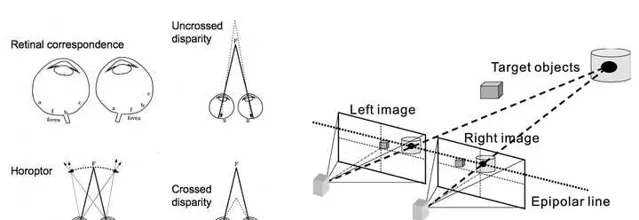
我们可以轮流开合一只眼睛盯着近处的物体去做一个小实验,大家一定会发现,两只眼睛单独看同一个物体时,画面是有偏差的,偏差的大小和「深度」有关系,这个深度通俗的讲就是眼睛到物体的距离,同样大小的物体,距离越远,偏差越小,距离越小,偏差越大。
因此这个方法在扫地机中可以用来判断障碍物的距离。
在很多行业双目视觉方案都有应用,如我曾经研发过的三维扫描仪等,只不过在扫地机行业里还比较少见,之所以大家都不用,有以下原因:
这些技术是短期内难以复制的技术
举的两个例子,都是要长时间去整机调校的,并非简单抄袭仿制就能应用,所以这两个技术在国内是领先的,而国内品牌又是国际领先,所以我对比了国外的扫地机后,很确定的得到这个结论。
对于扫地机未来趋势的一些看法、期待、预判
抛开以上提到的两个技术案例,我也想对扫地机行业的现状做一些梳理。
1、行业内卷很厉害,如果做张表出来,百分之八十以上的配置、参数都是雷同的。
2、参数的竞争,已经进入一种不科学的程度,如吸力数据像房价一样一直飙升。
3、大部分创新点,仿效的很快,似乎没有什么专利保护,和供应商也有关系(谁的生意都想做),定制件慢慢变成了标准件。
4、多模态AI的融入、结合,其中
真正的3D地图将会区别于现有的虚拟3D地图
,通过云+端的AI视觉SLAM,对于复杂地面的污渍状况可实现识别,机器人有了对场景、污垢的更全面更精准的认知,对于下一步完全脱离主人的操控提供了运行决策,扫地机将更有独立思维。
5、扫地机这两三年,颠覆性的改变有,但很少,
形态也许该变一变
了,比如戴森的360 VisNav虽然不懂中国用户的生活习惯,但是它的结构设计我觉得更合理:

希望用户给扫地机产品和制造商更多包容
扫地机区别于其他家电的一个很大的特征:
其他电器买回去相对固定,用法也单一,只要不坏就问题不大。
扫地机是真正意义上的机器人产品,它是会运动的,碰到桌腿是槽点、扯到一根线是槽点、污渍太顽固一次没拖干净是槽点,传感器脏了没擦拭不按正常轨迹移动也是槽点,还涉及到脏水脏污,处理不当会漏水发臭等隐患,扫地机受限于环境的千变万化、垃圾的千变万化、主人习惯习性的千变万化,吐槽点会非常非常多。
有时候我们这种扫地机博主,也成为了扫地机的公益售后服务人员。
这就导致,扫地机产品能看到的负面信息要远远大于其他电器。
但实际我使用测试这么多产品下来,只要稍加注意,使用起来都没有太多障碍;并且小概率发生的一些小问题普通人也完全可以自行解决。
所以,中国的用户是幸福的,我们用相对低的价格,用着全球最先进的家务机器人。
文末放一些自己以往的建议文章:











