機器人是一種機電裝置,能夠以某種方式對其環境做出反應,並采取自主決策或行動以實作特定任務。
機器人專家開發可以自行移動的人造機械裝置,其運動必須被建模、計劃、感知、驅動和控制,其運動行為可能受到「編程」的影響。
這個定義意味著,只有當裝置包含受傳感、規劃、驅動和控制元件影響的可移動機構時,它才能被稱為「機器人」。 電機和執行器是使機器人可移動的裝置。電機和執行器將電能轉換為物理運動。 絕大多數執行器產生旋轉或線性運動。
在本說明中,將解釋更常見的電機和執行器型別,它們的基本原理以及如何控制它們。
電機用於「驅動」機器人中的某些東西:它的輪子、腿、軌域、手臂、手指、傳感器轉塔、相機或武器系統。實際上有幾十種型別的馬達,但我將討論業余機器人中最常用的型別。電機分為:
交流(交流)電機很少用於移動機器人,因為大多數機器人都是由來自電池的直流電(DC)供電的。此外,由於電子元件使用直流電,因此執行器也使用相同型別的電源更方便。交流電機主要用於需要非常高扭矩的工業環境,或電機連線到電源/墻壁插座的工業環境。因此,我不會在這裏解釋交流電機。
電機控制器
電機控制器是一種幫助微控制器控制電機的電子裝置。電機控制器充當微控制器、電源或電池與電機之間的中間裝置。
雖然微控制器(機器人的大腦)決定電機的速度和方向,但由於其功率(電流和電壓)輸出非常有限,它無法直接驅動它們。另一方面,電機控制器可以提供所需電壓下的電流,但不能決定電機應如何執行。
因此,微控制器和電機控制器必須協同工作,以使電機適當地移動。通常,微控制器可以指示電機控制器如何透過標準和簡單的通訊方法(如UART或PWM)為電機供電。此外,一些電機控制器可以透過模擬電壓(通常由電位計建立)手動控制。
電機控制器的物理尺寸和重量可能會有很大差異,從用於控制迷你相撲機器人的比手指尖還小的裝置到重達幾公斤的大型控制器。電機控制器的尺寸通常與其可以提供的最大電流有關。更大的電流意味著更大的尺寸。
由於有幾種型別的電機,因此有幾種型別的電機控制器(不同型別的電機需要不同型別的控制器):
有刷直流電機
有刷直流電機是一種使用兩個電刷將電流從源極傳導到電樞的電機。有刷直流電機有幾種變體,但永磁直流電機(PMDC)廣泛用於機器人技術。有刷直流電機廣泛用於從玩具到按鈕可調汽車座椅的各種套用。有刷直流 (BDC) 電機價格低廉,易於驅動,並且隨時提供各種尺寸和形狀。
有刷直流電機由六個不同的元件組成:軸、電樞/轉子、換向器、定子、磁鐵和電刷。有刷直流電機由兩個面向同一方向的磁鐵組成,圍繞位於有刷直流電機中間的兩個線圈,圍繞轉子。線圈的位置面向磁鐵,使電流流向磁鐵。這會產生磁場,最終將線圈從它們面對的磁鐵上推開,並導致轉子轉動。
有刷直流電機有兩個端子;當在兩個端子上施加電壓時,成比例的速度輸出到有刷直流電機的軸。有刷直流電機由兩部份組成:定子(包括外殼、永磁體和電刷)和轉子(由輸出軸、繞組和換向器組成)。有刷直流電機定子是靜止的,而轉子相對於有刷直流電機定子旋轉。定子產生圍繞轉子的靜止磁場。轉子也稱為電樞,由一個或多個繞組組成。當這些繞組通電時,它們會產生磁場。該轉子磁場的磁極將被吸引到定子產生的相反磁極,導致轉子轉動。當電機轉動時,繞組不斷以不同的順序通電,以便轉子產生的磁極不會超過定子中產生的磁極。轉子繞組中磁場的這種切換稱為換向。
與其他馬達型別(即無刷直流、交流感應)不同,BDC 電機不需要控制器來切換電機繞組中的電流。相反,BDC電機繞組的換向是透過機械方式完成的。分段銅套管稱為換向器,位於 BDC 電機的軸上。當電機轉動時,碳刷滑過換向器,與換向器的不同部份接觸。這些段連線到不同的轉子繞組,因此,當在電機的電刷上施加電壓時,電機內部會產生動態磁場。重要的是要註意,電刷和換向器是BDC電機中最容易磨損的部件,因為它們相互滑動。
套用:
優勢:
局限性: 除了換向器電刷發出的嗚嗚聲外,這些電機還會產生大量電雜訊,這些電雜訊會回到其他電路並引起問題。
直流減速電機

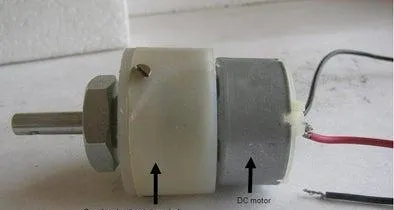
減速直流電機可以定義為直流電機的擴充套件,之前已經揭開了其Insight細節的神秘面紗。減速直流電機有一個齒輪元件連線到電機。電機的速度以每分鐘軸的轉數來計算,稱為 RPM .齒輪元件有助於增加扭矩並降低速度。在齒輪電機中使用正確的齒輪組合,其速度可以降低到任何所需的數位。齒輪降低車輛速度但增加其扭矩的概念稱為齒輪減速。本見解將探討使齒輪頭以及齒輪直流電機工作的所有次要和主要細節。
直流減速電機的工作原理
直流電機在相當的電壓範圍內工作。輸入電壓越高,電機的RPM(每分鐘轉數)就越大。例如,如果電機在 6-12V 範圍內工作,則在 6V 時最小 RPM,在 12V 時最大。就電壓而言,我們可以將等式表示為:RPM= K1 * V,其中,K1=感應電壓常數V=施加的電壓。
知道齒輪的工作非常有趣。可以用角動量守恒原理來解釋。半徑較小的齒輪將比半徑較大的齒輪覆蓋更多的 RPM。但是,較大的齒輪將為較小的齒輪提供更大的扭矩,反之亦然。輸入齒輪(傳遞能量的齒輪)與輸出齒輪之間的角速度比較給出了齒輪比。當多個齒輪連線在一起時,也遵循能量守恒。另一個齒輪的旋轉方向總是與相鄰的齒輪相反。在任何直流電機中,RPM 和扭矩成反比。因此,具有更大扭矩的齒輪將提供較小的 RPM 並反之。在減速直流電機中,套用了脈寬調變的概念。
例如,空載的直流電機可能以 12000 rpm 的速度旋轉並提供 0.1 kg-cm 的扭矩。增加了 225:1 的減速比以按比例降低速度並增加扭矩:12000 rpm / 225 = 53.3 rpm 和 0.1 x 225 = 22.5 kg-cm。電機現在能夠以更合理的速度移動更多的重量。
在減速直流電機中,連線電機和齒輪頭的齒輪非常小,因此它將更多的速度傳遞到齒輪頭的較大齒部份並使其旋轉。齒輪的較大部份進一步轉動較小的雙工部份。小型雙工部份接收扭矩,但不接收其前身的速度,並將其傳遞到其他齒輪的較大部份,依此類推。第三檔的雙工部份比其他齒輪具有更多的齒,因此它將更多的扭矩傳遞給連線到軸的齒輪。
減速電機的控制
直流減速電機可以像直流電機控制一樣進行控制。
套用:
優勢:
局限性: 對於與低壓電機一起使用的低成本塑膠齒輪系來說,這尤其是一個問題。額外的阻力會使這些齒輪系在低速時搖搖欲墜。
第 8 步:無刷直流電機

無刷直流(BLDC)電機有很多名稱:無刷永磁,永磁交流電機,永磁同步電機等。之所以出現混淆,是因為無刷直流電機不直接由直流電壓源執行。但是,正如我們將看到的,基本工作原理類似於直流電機。
BLDC 具有帶永磁體的轉子和帶繞組的定子。它本質上是一個由內而外轉動的直流電機。電刷和換向器已被取消,繞組連線到控制電子裝置。控制電子裝置取代了換向器的功能,並為正確的繞組供電。如動畫所示,繞組以圍繞定子旋轉的模式通電。通電的定子繞組引導轉子磁鐵,並在轉子與定子對齊時進行切換。沒有火花,這是 BLDC 電機的一個優點。
直流電機的電刷有幾個限制;刷子壽命、刷子殘留物、最大速度和電雜訊。BLDC 電機可能更清潔、更快、更高效、噪音更小、更可靠。但是,BLDC 電機需要電子控制。
然後,無刷直流電機的結構與交流電機非常相似,使其成為真正的同步電機,但一個缺點是它比同等的「有刷」電機設計更昂貴。
內轉者與外轉者
有兩種型別的無刷RC電機,
內轉子
和
外轉子
。
內轉無刷電機的永磁體位於電磁鐵的內部。外轉子無刷電機在電磁鐵的外部具有永磁體。
電機旋轉得越快,效率就越高。內轉子電機轉動速度非常快,比外轉子電機效率高得多。內轉無刷遙控電機需要在遙控飛機的電機和螺旋槳之間安裝減速齒輪箱。
內轉子的缺點是添加的部件可能會並且確實會失敗。齒輪被剝離,變速箱軸很容易彎曲。在整齊地安裝遙控飛機的變速箱電機組合時,尤其是在整流罩下,它也可能是一個障礙。
操作理論
無刷電機的機械原理非常簡單。唯一的運動部件是轉子,其中包含磁鐵。事情變得復雜的地方是協調激勵繞組的順序。每個繞組的極性由電流方向控制。動畫演示了控制器將遵循的簡單模式。交流電改變極性,使每個繞組具有「推/拉」效果。訣竅是使這種模式與轉子的速度保持同步。有兩種(廣泛使用的)方法可以實作此目的。大多數愛好控制器測量未通電繞組上產生的電壓(反向EMI)。這種方法在高速執行中非常可靠。隨著電機旋轉速度變慢,產生的電壓變得更加難以測量,並且會產生更多的誤差。較新的愛好控制器和許多工業控制器利用霍爾效應傳感器直接測量磁體位置。這是控制電腦風扇的主要方法。
控制
無刷直流電機的控制與普通的有刷直流電機有很大不同,因為它包含了一些方法來檢測轉子角位置(或磁極),以產生控制半導體開關器件所需的反饋訊號。最常見的位置/極傳感器是「霍爾效應傳感器」,但一些電機也使用光學傳感器。使用霍爾效應傳感器,電磁鐵的極性由電機控制驅動電路切換。然後,電機可以輕松地同步到數位時鐘訊號,提供精確的速度控制。無刷直流電機可以構造為具有外部永磁轉子和內部電磁鐵定子或內部永磁轉子和外部電磁定子。
速度控制
無刷直流馬達實際上是三相交流馬達。為了控制速度,使用電子速度控制或ESC。無刷電調系統基本上從板載直流電源輸入產生有限電壓的三相交流電源輸出,透過發送從電調電路產生的一系列交流訊號來執行無刷電機,采用非常低的旋轉阻抗。無刷電機,根據其物理配置也稱為外轉子或內轉子,與傳統有刷電機相比,由於其效率、功率、使用壽命和重量輕,因此在「電動飛行」無線電控制航空建模愛好者中非常受歡迎。然而,無刷交流電機控制器比有刷電機控制器復雜得多。
正確的相位隨電機旋轉而變化,電調要考慮到這一點:通常,電機的反電動勢用於檢測這種旋轉,但存在使用磁性(霍爾效應)或光學探測器的變化。電腦可編程速度控制通常具有使用者指定的選項,允許設定低電壓截止限制、正時、加速度、制軔和旋轉方向。反轉電機的方向也可以透過將三個引線中的任何兩個從電調切換到電機來實作。
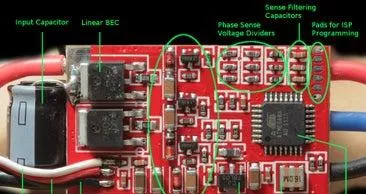
電調
的額定電流 電調
將有一個功率限制。為了處理更大的功率,ESC需要更大,更重,並且更昂貴。重要的是要知道您的電機將在全油門下拉動的峰值電流。這決定了您應該在 ESC 中尋找的額定電流。始終選擇額定電流高於所需電流的電調。如果電機要拉動 12A,則額定電流為 25A 的電調比額定電流為 10A 的電調要好得多。10A ESC 可能會過熱和烹飪,即使您只以半油門飛行。電調相對較輕,並保持很高的轉售價值,因此這是您的電力系統中不值得吝嗇的一個計畫。選擇正確的型別和確定最小額定電流是兩個重要步驟。接下來的選擇取決於您的偏好。
額定電壓
所有電調都有電壓限制。有些甚至不止一個!您的電池電壓是多少?選擇設計為在相同或更高電壓下工作的電調。一些電調設計用於低電壓(低於13V),一些用於中壓(低於25V),一些用於高電壓(高於25V)。您不應該將高壓電池連線到低壓電調,但將高壓電調與低壓電池一起使用也是浪費。
優勢
與其「有刷」表親相比,無刷直流電機的優勢在於更高的效率、高可靠性、低電雜訊、良好的速度控制,更重要的是,沒有電刷或換向器磨損,從而產生更高的速度。然而,它們的缺點是它們更昂貴且控制更復雜。
套用:
優勢:
局限性: 某些型別的無刷電機需要單獨的控制器才能執行。
第 9 步:伺服電機
伺服電機是一種可以非常精確地推動或旋轉物體的電氣裝置。如果要以某些特定角度或距離旋轉和物件,請使用伺服電機。它只是由透過伺服機構執行的簡單馬達組成。如果使用的電機是直流供電的,則稱為直流伺服電機,如果是交流供電的電機,則稱為交流伺服電機。我們可以在小巧輕便的封裝中獲得非常高扭矩的伺服電機。除了這些功能之外,它們還被用於許多套用,如玩具車、遙控直升機和飛機、機器人、機器等。伺服電機的位置由電脈沖決定,其電路放置在電機旁邊。
現在的伺服系統具有巨大的工業套用。伺服電機套用也常見於遙控玩具車中,用於控制運動方向,它也非常常用作移動CD或DVD播放器托盤的電機。除此之外,我們在日常生活中還看到了其他數百種伺服電機套用。使用伺服的主要原因是它提供角度精度,即它只會旋轉我們想要的次數,然後停止並等待下一個訊號采取進一步行動。這與普通馬達不同,普通馬達在通電時開始旋轉,並且旋轉會繼續,直到我們關閉電源為止。我們無法控制馬達的旋轉過程;但是我們只能控制旋轉速度,可以開啟和關閉它。
伺服機構
它由三部份組成:
它是一個閉環系統,它使用正反饋系統來控制軸的運動和最終位置。這裏,裝置由比較輸出訊號和參考輸入訊號產生的反饋訊號來控制。
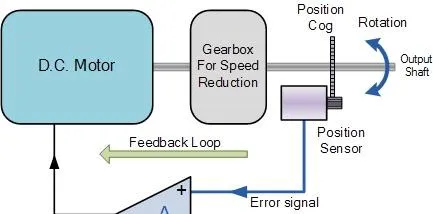
這裏參考輸入訊號與參考輸出訊號進行比較,第三個訊號由反饋系統產生。這第三個訊號充當控制裝置的輸入訊號。只要產生反饋訊號或參考輸入訊號和參考輸出訊號之間存在差異,該訊號就存在。因此,伺服機構的主要任務是在存在雜訊時將系統的輸出保持在所需值。
伺服電機
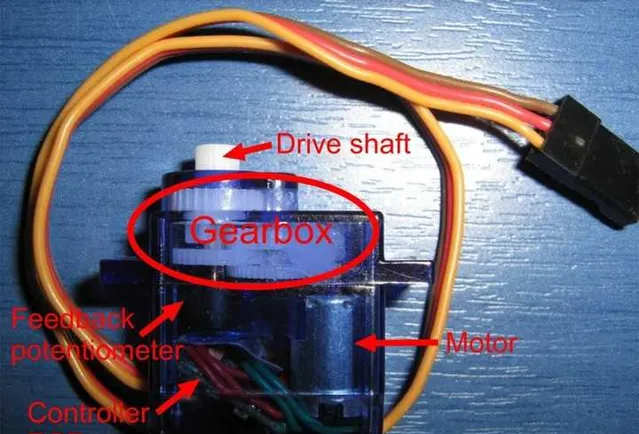
的工作原理 伺服由電機
(直流或交流)、電位器、齒輪元件和控制電路組成。首先,我們使用齒輪元件來降低轉速並增加電機的扭矩。假設在伺服電機軸的初始位置,電位器旋鈕的位置使得電位器的輸出埠沒有產生電訊號。現在,電訊號被饋送到誤差檢測放大器的另一個輸入端。現在這兩個訊號之間的差異,一個來自電位器,另一個來自其他來源,將在反饋機制中進行處理,並根據誤差訊號提供輸出。該誤差訊號充當電機的輸入,電機開始旋轉。現在電機軸與電位器連線,當電機旋轉時,電位器將產生訊號。因此,隨著電位器角位置的變化,其輸出反饋訊號也會發生變化。一段時間後,電位器的位置到達電位器輸出與提供的外部訊號相同的位置。在這種情況下,由於外部施加的訊號與電位計產生的訊號之間沒有差異,因此放大器到電機輸入的輸出訊號將沒有,在這種情況下電機停止旋轉。
控制伺服電機:
伺服電機由控制線提供的PWM(帶調變脈沖)控制。有最小脈沖、最大脈沖和重復率。伺服電機可以從其中性位置從任一方向旋轉 90 度。伺服電機期望每 20 毫秒 (ms) 看到一個脈沖,脈沖的長度將決定電機轉動的距離。例如,1.5ms脈沖將使電機轉動到90°位置,例如如果脈沖短於1.5ms軸移動到0°,如果脈沖長於1.5ms,則使伺服轉動到180°。伺服電機基於PWM(脈寬調變)原理工作,這意味著其旋轉角度由施加到其控制PIN的脈沖持續時間控制。基本上伺服電機由直流電機組成,直流電機由可變電阻器(電位器)和一些齒輪控制。直流電機的高速力透過齒輪轉換為轉矩。我們知道功=力X距離,在直流電機中力較小,距離(速度)高,而在伺服中,力高,距離較小。電位器連線到伺服的輸出軸,以計算角度並在所需角度停止直流電機。
回顧一下,伺服電機的控制脈沖與直流電機的控制脈沖之間有兩個重要區別。首先,在伺服電機上,占空比(導通時間與關斷時間)沒有任何意義——重要的是正向脈沖的絕對持續時間,它對應於伺服軸的命令輸出位置。其次,伺服有自己的電力電子裝置,因此很少有功率流過控制訊號。所有電源均來自其電源線,必須簡單地連線到 5 伏的大電流源。
連續旋轉伺服電機
連續旋轉伺服電機實際上是伺服器實際要做的修改版本,即控制軸位置。360°旋轉舵機實際上是透過改變舵機內部的某些機械連線來實作的。但是,某些制造商(如視差)也出售這些伺服器。使用連續旋轉舵機,您只能控制舵機的方向和速度,而不能控制位置。
套用:
優勢:
局限性: 大多數RC伺服器被限制為180度運動,定位精度和重復精度為+/- 1度是典型的。
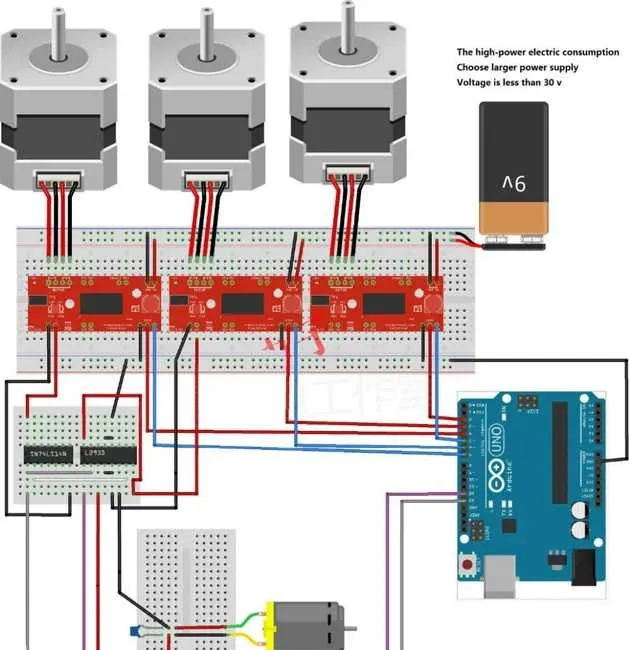
步進電機



步進電機是一種將電脈沖轉換為離散機械運動的機電裝置。當以正確的順序向其施加電指令脈沖時,步進電機的軸或主軸以離散的步進增量旋轉。電機旋轉與這些施加的輸入脈沖有幾個直接關系。施加脈沖的順序與電機軸的旋轉方向直接相關。電機軸的旋轉速度與輸入脈沖的頻率直接相關,旋轉的長度與施加的輸入脈沖數直接相關。
步進電機是用於位置控制的出色電機。它們可以在桌面印表機、繪圖儀、3D 印表機、CNC 銑床以及任何其他需要精確位置控制的東西中找到。步進電機是無刷電機的一個特殊部份。它們專為高保持扭矩而設計。這種高保持扭矩使使用者能夠逐步「步進」到下一個位置。這導致了一個簡單的定位系統,不需要編碼器。這使得步進電機控制器的構建和使用非常簡單。
步進電機最顯著的優點之一是能夠在開環系統中精確控制。開環控制意味著不需要有關位置的反饋資訊。這種型別的控制消除了對昂貴的傳感和反饋裝置(如光學編碼器)的需求。只需跟蹤輸入步進脈沖即可知道您的位置。
步進電機有什麽用?
每當需要受控運動時,步進電機都是不錯的選擇。它們可用於需要控制旋轉角度、速度、位置和同步性的套用中的優勢。
定位
– 由於步進器以精確的可重復步驟移動,因此它們在需要精確定位的套用中表現出色,例如 3D 印表機、CNC、相機平台和 X,Y 繪圖儀。一些磁碟機還使用步進電機來定位讀/寫磁頭。
速度控制
– 精確的運動增量還可以對過程自動化和機器人技術的轉速進行出色的控制。
低速扭矩
- 普通直流電機在低速時沒有太大的扭矩。步進電機在低速時具有最大扭矩,因此對於需要低速和高精度的套用來說,它們是一個不錯的選擇。
操作理論
步進電機的行為與無刷電機完全相同,只是步長要小得多。唯一的運動部件是轉子,其中包含磁鐵。事情變得復雜的地方是協調激勵繞組的順序。每個繞組的極性由電流方向控制。動畫演示了控制器將遵循的簡單模式。交流電改變極性,使每個繞組具有「推/拉」效果。一個顯著的區別是步進器的磁鐵結構有何不同。很難讓一組磁鐵在小範圍內表現良好。它也非常昂貴。為了解決這個問題,大多數步進電機利用堆疊板方法將磁極引導成「齒」。
步進電機有兩種型別:
單極
和
雙極
步進電機。從根本上說,這兩種型別的工作方式完全相同;電磁鐵以順序方式開啟,誘導中央電機軸旋轉。
兩種型別之間的區別在於電壓電平。單極步進電機僅在正電壓下執行,因此施加到電磁線圈上的高電壓和低壓電壓分別為 5V 和 0V。雙極步進電機有兩個極性,正極和負極,因此其高電壓和低壓分別為 2.5V 和 -2.5V。考慮到這些電氣差異,這兩種樣式之間的物理區別在於,單極配置需要在每個線圈的中間有一根額外的導線,以允許電流流過線圈的一端或另一端。這兩個相反的方向產生磁場的兩個極性,有效地模擬了雙極步進電機的正負電壓能力。雖然兩者的總電壓範圍均為5V,但雙極步進電機實際上將具有更大的扭矩,因為電流流過整個線圈,產生更強的磁場以誘導軸旋轉到適當的角度。另一方面,由於線圈中間有額外的電線,單極步進電機僅利用線圈長度的一半,因此可用於磁性將軸固定到位的扭矩較小。
兩相雙極電機有 2 組線圈。一個4相單極電機有4.兩相雙極電機將有 2 根電線 - 每相 4 根。一些電機帶有靈活的接線,允許您以雙極或單極方式執行電機。
驅動步進機
驅動步進電機比驅動普通有刷直流電機要復雜一些。步進電機需要一個步進控制器來及時為相位通電,使電機轉動。
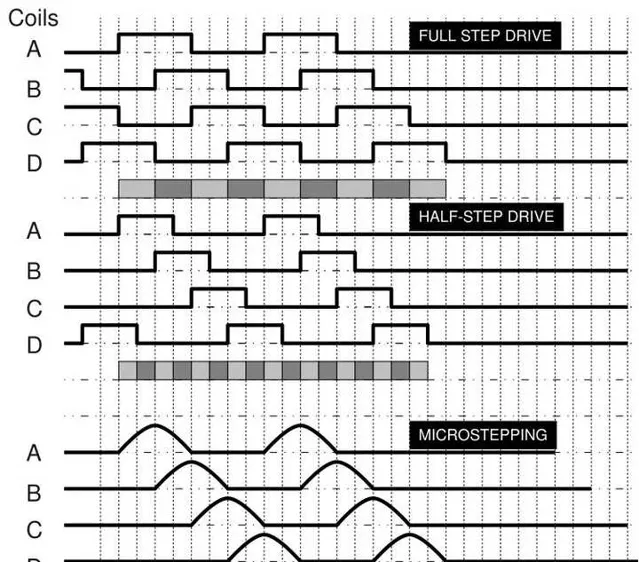
步進電機的驅動方式有幾種不同的方式,包括全步進、半步進和微步進。這些驅動方式中的每一種都提供步進電機可以使用的不同扭矩和步長。
全步進驅動器始終「開啟」兩個電磁鐵。為了旋轉中心軸,其中一個電磁鐵被關閉,下一個電磁鐵被開啟,導致軸旋轉1/4的齒(至少對於混合步進電機)。這種始終有兩個電磁鐵的樣式在所有樣式中具有最大的扭矩,但步長最大。半步驅動在兩個電磁鐵和僅一個電磁鐵開啟之間交替。要旋轉中心軸,第一步是第一個電磁鐵通電,然後第二個電磁鐵也通電,而第二個電磁鐵在第二步中仍然通電。第三步關閉第一個電磁鐵,第四步開啟第三個電磁鐵,同時第二個電磁鐵仍然供電。這種模式,如上圖所示,使用的步長是全步進驅動的兩倍,允許步長的一半,但它的整體扭矩也較小,因為並不總是有兩個電磁鐵將中心軸固定到位。毫不奇怪,微步在這些樣式中具有最小的步長。最常見的微步方法之一是進行「正弦余弦微步」。這意味著流過每個線圈的電流縱,從而產生正弦/余弦波。兩個線圈之間波的「重疊」導致大量的子步驟。子步的實際數量取決於您可以為線圈提供多少明顯的電流變化,但微步仍然是所有樣式中最小的步長,因此是最精確的運動。與這種方式相關的扭矩取決於在特定時間流過線圈的電流量,但始終小於全步進驅動。
套用:
優勢:
局限性:
如何為您的機器人選擇正確的電機?
選擇適合您任務的電機是規劃機器人計畫最重要的部份之一。正如笑話所說,好訊息是有許多型別的電機可供選擇,壞訊息也是有許多型別的電機可供選擇。
要選擇適合您計畫的馬達,您應該考慮一些重要的電機規格:
扭矩是衡量電機提供「轉動力」的能力的指標。在機器人中,電機扭矩被傳遞到輪子或杠桿,然後導致機器人移動或杠桿擡起、推或拉動某物。扭矩是根據力乘以力與旋轉點(即電機軸)之間的垂直距離來測量的。它通常以盎司英寸(oz-inch),克厘米 (gm-cm) 或英尺磅 (ft-lbs) 表示。盎司英寸(oz-in)是最常見的。
估算所需的扭矩是一項艱巨的任務。我們需要知道負載/漫遊車的品質和摩擦,以便確定電機選擇的扭矩。獲得品質估計(甚至更好的實際品質)對於選擇電機至關重要。如果您根據品質估計進行設計,則應為品質膨脹套用良好的余量。摩擦力是一種力,而不是反對兩個相互接觸的表面之間的運動。您必須考慮靜摩擦、動態摩擦和捲動摩擦才能準確測量扭矩。
為了驅動機器人,電機扭矩必須至少克服作用在車輪半徑上的摩擦力的外部扭矩。使用以下公式找到所需的扭矩:
T = 8 x C x W x D
摩擦力從 0.001 到 0.03 不等。例如,對於 C= 0.03,移動帶有 5 英寸直徑輪子的 4 磅機器人的最小扭矩為:
T = 8 x 0.03 x 5 磅 x 4 英寸 = 4.8 盎司英寸
只有當扭矩大於與機器人運動相反的總力時,電機才能保持恒定速度。如果電機轉矩小於反向轉矩,電機將停止並可能損壞,因為電能無法轉換為轉矩。
確定您需要多少力/扭矩後,下一步是確定車輪需要轉動的速度。速度要求更容易估計,並且取決於您的機器人應該以多快的速度執行。直流電機以數千RPM的速度以低扭矩執行,但與此相比,大多數機器人需要的速度較低。輸出扭矩太低,無法移動機器人。因此,這不適合駕駛機器人。為了使用電機,我們增加了一個變速箱來降低電機轉速並增加輸出扭矩。根據電機和變速箱輸出軸之間使用的齒輪,同一電機可能會產生不同的扭矩和速度額定值。許多直流電機已經連線了變速箱,這些簡稱為直流減速電機,是電機的型別。透過降低速度,您還可以提高電機的位置精度。減速電機的速度、扭矩和精度直接受齒輪比的影響,如以下等式所示:
輸出速度 = 電機轉速 / 齒輪比
輸出精度 = 電機精度 / 齒輪比
雖然減速比在確定變速箱輸出扭矩方面起著很大的作用,但透過使用變速箱也引入了效率低下的問題。電機的一些扭矩轉化為熱量,由於齒輪之間的摩擦而損失。另一個缺點是齒輪電機不精確。也就是說,同一型號的兩台電機,在同一天制造,並以相同的電流和電壓執行,不會以完全相同的速度轉動。因此,具有兩個驅動電機的機器人(最常見的配置)不會在沒有某種控制單個電機速度的方法的情況下直線移動。
對於變速箱,扭矩和速度可以被視為一個可互換的特性:如果您需要更大的扭矩和更低的速度,請嘗試找到具有更高減速比的變速箱的相同電機。如果您需要更高的速度和更小的扭矩,請嘗試找到具有較低減速比的變速箱的相同電機。但是,不建議單獨購買變速箱和電機進行混合搭配,除非它們是專門為彼此設計的。變速箱客製可能會出錯很多,對於大多數使用者來說,簡單地購買已經連線變速箱的電機要麻煩得多。
一個主要缺點是齒輪頭電機不精確。一些套用需要非常精確的運動和角度,如機械臂和模型平面控制面。步進電機和伺服電機最適合此類套用。伺服電機具有內部位置調節功能,並降低到較低的速度,從而實作非常精確的位置控制。步進電機逐步移動,利用磁場以離散增量移動電機。根據電機的步長和控制器的步進模式,步進電機可以實作極其精確的位置。步進電機的步距角通常低至1.8º,使用微型步進控制器可以一次前進十六分之一。步進電機還具有高保持扭矩的優點 - 當電機停止但仍通電時,它將牢固地保持其位置。
通常,伺服電機的尺寸比步進電機小,扭矩小。大多數舵機的運動範圍也有限。典型的伺服電機的旋轉範圍為 180º 或更小,盡管有些能夠多次旋轉甚至連續旋轉。伺服系統在不需要高扭矩或大運動範圍的RC(遠端控制)套用中最常見。另一方面,步進電機用於需要極高精度或高扭矩的套用。CNC(電腦數控)機床是步進電機用途的一個典型例子。
一些套用需要高速和輕質,例如多旋翼和無人機,在這種情況下,使用高效的無刷直流電機。
另一個重要的考慮因素是工作電壓。在計劃計畫中將使用哪些電池組之前,您必須找到電機執行的標稱電壓通常電壓越高,電機的速度越高。您可以檢視電機數據表中的電壓常數,以了解每伏特的速度。
機器人計畫中最常用的馬達是直流馬達。直流電機的常見首選電壓為 3、6、12 和 24 伏。如果對電機施加的電壓低於數據手冊中的電壓,則扭矩將無法克服內部摩擦 - 主要來自電刷。此外,如果對電機施加比支持的電壓更高的電壓,它可能會發熱並可能損壞。
參考:
機器人中使用的不同型別的電機 - 機器人熱潮 (robocraze.com)
完整的機器人電機指南:12個步驟(附圖) - 指導 (instructables.com)
用於機器人套用的電機和驅動器 |電工 (electrocraft.com)











