Dupont, P. E., Nelson, B. J., Goldfarb, M., Hannaford, B., Menciassi, A., O’Malley, M. K., ... & Yang, G. Z. (2021). A decade retrospective of medical robotics research from 2010 to 2020. Science Robotics, 6(60), eabi8017. DOI: 10.1126/scirobotics.abi8017
聲明:本文內容根據本人理解有所調整。
醫療機器人技術是一種前沿性的學科,其未來發展方向受到了極大的關註。理解近期的研究成果與臨床需求以及商業化進度,對於未來醫療機器人的研究規劃十分重要。根據過去十年科研文章參照率可以確定過去十年醫療機器人的技術研究與發展集中在8個關鍵主題。未來研究學者應該平衡技術研究與套用需求之間的關系,從而推動機器人技術健康的發展趨勢。參考文獻中絕大多是是臨床實驗結果的報告,只有不足25%的文章是關於工程描述的。
三十多年前,人們采用工業機器人做了第一台手術。二十多年前,手術機器人在裝配到醫院中開始科學實驗。過去十年內,醫療機器人飛速發展,全球數以千計的機器人手術系統已經進入臨床,並開展了百萬級的機器人手術。手術機器人已經成為醫療領域未來的技術發展方向。當然,除了手術機器人,康復型機器人以及健康監護系統也是醫療體系未來研究和發展的趨勢。
醫療機器人最早是采用遠端控制形式,並以提高操作精度作為研發目標,並最早套用於神經外科手術和骨科。第一台真正意義的遠端是20年前跨大西洋的膽囊手術。雖然早期的技術並不穩定,但是新技術的整合,手術機器人必將推動醫療健康產業重要的發展。
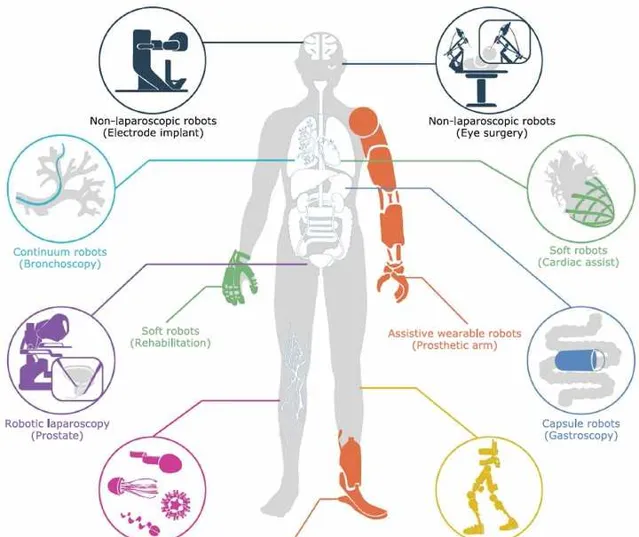
熱門主題:
過去十年中,腹腔鏡機器人占據了絕對主角,但是磁驅以及其所代表的微納機器人在工程以及臨床中的論文正在成指數趨勢增長,其在臨床中的套用前景也受到了廣泛關註。
軟體機器人目前正在飛速的發展,研究學者普遍認為軟體機器人在醫療領域的套用未來可期。
相比較而言,連續體機器人在1990年以前至今一直不溫不火,所以連續體機器人的機械設計並不是目前的研究熱點,而數學建模才是研究的重點,因為臨床需要嚴格的控制精度。由於商業效果,連續體機器人的研究熱度正在逐年下降。但是Intuitive Surgery的Ion機器人系統的成功觸發了連續體機器人未來的發展動力。
膠囊機器人是八大熱門領域中熱度最低的,雖然它的效能在近十年來發展迅速,但是它在臨床中的套用價值還有待於進一步的驗證。目前軟體膠囊機器人更多的是作為磁驅式的,未來將作為腸胃系統無失真診斷、治療的手段(其實,國內外都已經實作了多種商業化膠囊機器人作為腸胃診斷、治療方法)。
腹腔鏡手術機器人
因為達芬奇手術機器人成功的商業化示範,無論從臨床、商業化和學術圈,腹腔鏡機器人是目前最大的熱門。同時,圍繞根治性前列腺切除術、膀胱癌根治性膀胱切除術、直腸癌切除術、子宮切除術作為效能比對試驗。
過去十年,五十多種手術工具專為達芬奇手術機器人研發,促進了達芬奇手術機器人的快速發展,並形成了絕對的技術壁壘。因此,大型醫療機器人公司開始與直覺公司在此賽道上開展業務競爭。
過去十年學術研究主要集中兩大方向:腹腔鏡平台的效能增強,主要是增強腹腔鏡的自動化程度,並將力感知整合到工具中促進連續作業。第二個研究方向是設計能夠降低創傷的新機器人架構。例如單孔鏡受到了越來越多的關註。
微型手術Microsurgery
視網膜手術帶來的對於手工手術系統現有效能的特別挑戰,為了解決這些挑戰提出三種解決方案:1)手持裝置的振動抑制;2)合作式機器人,3)遙操作機器人。
未來的技術發展
新一輪的醫療系統將關註電極陣列面積和植入的發展,以及對軟體機器人的控制以及磁驅機器人導航平台的研究。為了支持這些技術能夠走進臨床,需要自適應的手術協作控制與術中感知技術等理論技術的支撐。
輔助型穿戴機器人
穿戴機器人學領域關註設計與穿戴裝置的控制,從而改善運動效能,從而促進個體運動神經功能的修復。這就包括面向中風和脊柱神經損傷後的上肢、下肢、手指等功能的重建進一步,與腦機、肌肉等神經介面融合是當前技術發展的主要形式,透過模式辨識感知神經意圖並控制穿戴裝置實作平滑運動。這一研究方向目前的效果讓人們對它未來的發展充滿了期待。對於康復訓練型機器人,與健康大數據相結合的技術路線是主要的研究法向。軟體機器人是一種物理實作形式,其未來的研發前景將極大受限於材料等因素的影響。
總而言之,未來穿戴機器人最大的研究方向在於加強與類腦機介面的資訊融合。
膠囊機器人
未來膠囊機器人的發展在於進一步縮小體積,比如透過體外驅動技術、無動力源改進,例如磁驅與磁導航技術的整合。未來十年,聯合多模態影像的微型膠囊機器人的智慧磁場控制是主要的研究課題。
磁驅動醫療機器人
本質上屬於磁驅動的微納機器人。具體包括多自由度電磁導航系統建模、磁場引導技術、磁導航纖維機器人、微米級的此驅動運動控制策略(面向各類運動速度)。
軟體醫療機器人
軟體機器人除了直觀上的穿戴輔助外,在醫療方面更值得關註的研究課題包括:
- 面向手術和介入的軟體裝置,包括軟體連續體、軟體膠囊;
- 軟體、仿生、柔順結構,能夠整合到現有復雜系統中的元件,主要是面向環境互動任務。
- 面向先進仿真的軟體結構和系統。
連續體醫療機器人
醫療機器人技術的前進演化趨勢必然是朝著自動化趨勢推進的,其本質是控制系統與生理環境的互動適應。










