前言
之前對機器人機構的建模都是采用的DH參數法,建立座標,確定參數,確實比較繁瑣
這次采用基於旋量的指數積公式之後,意識到運動學建模可以如此優雅簡潔
自己也是從機械專業出身,在介紹相關知識方面,盡量通俗易懂
能不彪公式就不彪公式
註:
看完文章,就可以對串線上構進行建模,並且相關程式碼【現代機器人學】都附帶,我將連結放在後面
文章中參考的資料都來自於【現代機器人學】,並且作者也在網站上公開了免費的電子版下載
會持續分享一些機器人相關的知識,歡迎關註Winter
大綱
文章一:舉個例子看看基於旋量的機器人指數積POE公式比DH參數法簡潔之處
文章二:用機械人能聽懂的方式講解方法的來歷,做到心中有數
文章三:用Matlab的仿真模擬實驗
直接上例子
這裏的例子只是為了表明指數積公式的簡潔之處,只需要三個步驟,至於為什麽要這樣做,將在下一篇文章中講解
(左)通用機器人的UR5 6R機械臂。(右)顯示在其零位置。繞所示軸的正旋轉由通常的右手規則給出。
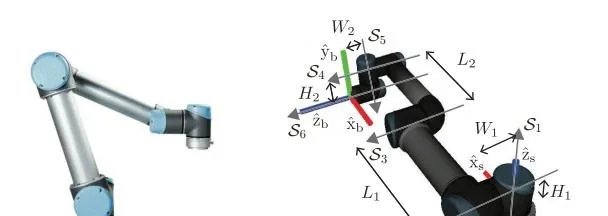 來自【現代機器人學】
來自【現代機器人學】
步驟一
先將這個機構擺放在初始位置,也就是關節位置為0
我們只關心兩個座標系,基座座標系 Xs Ys Zs 如圖 和末端座標系 Xb Yb Zb
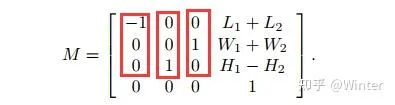
確定這兩個座標系後,寫出末端座標系相對基座座標系的位姿矩陣M
 矩陣解讀
我圈出來的三個向量分別就是末端座標系的x軸y軸z軸 這三個向量 在基座座標系中的向量
而第四列的向量就是末端座標系的原點在基座座標系中的位置
矩陣解讀
我圈出來的三個向量分別就是末端座標系的x軸y軸z軸 這三個向量 在基座座標系中的向量
而第四列的向量就是末端座標系的原點在基座座標系中的位置
步驟二
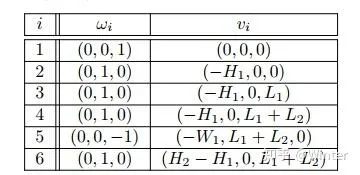
建立這樣一個表
 表格
表格的第一列,就是對應著上圖中每個旋轉關節的軸線,在基座座標系中的單位向量
第二列: v=r\times w
,r就是對應軸線上任意一點的位置,
拿第3行來說,圖中第3個軸的軸線是 w=(0, 1, 0 )
,他經過了一個點, r=(L1, 0, p)
這個點是不唯一的,只要經過軸線即可, r\times w
進行叉乘為:( -p , 0, L1 )
表格
表格的第一列,就是對應著上圖中每個旋轉關節的軸線,在基座座標系中的單位向量
第二列: v=r\times w
,r就是對應軸線上任意一點的位置,
拿第3行來說,圖中第3個軸的軸線是 w=(0, 1, 0 )
,他經過了一個點, r=(L1, 0, p)
這個點是不唯一的,只要經過軸線即可, r\times w
進行叉乘為:( -p , 0, L1 )
步驟三
由上面的w v 組成 s
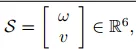 S就是指的運動旋量,這裏我們先不管它,
S就是指的運動旋量,這裏我們先不管它,
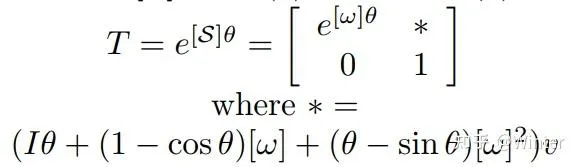 上面列出的表格中,每一行都可以得到一個T,這個T具體怎麽計算看上面這個公式?
\theta
就是你這個關節要轉多少度?
I
就是一個單位矩陣,
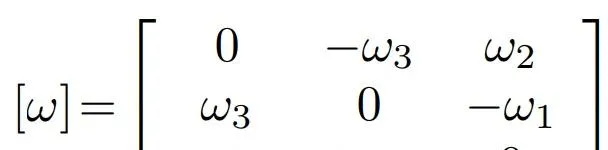
\left[ w \right]
長這個樣子只要根據上面的w將它填成這樣的矩陣就可以,
上面列出的表格中,每一行都可以得到一個T,這個T具體怎麽計算看上面這個公式?
\theta
就是你這個關節要轉多少度?
I
就是一個單位矩陣,
\left[ w \right]
長這個樣子只要根據上面的w將它填成這樣的矩陣就可以,
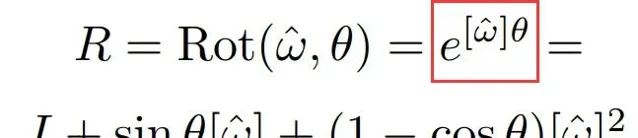
 最難的就是這個,其實就是我們的旋轉矩陣,
最難的就是這個,其實就是我們的旋轉矩陣,
 那你已經能根據旋量計算 每個關節的T矩陣
那你已經能根據旋量計算 每個關節的T矩陣
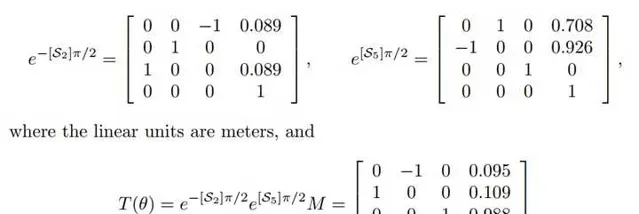
 這是最終的T矩陣
最終的矩陣,就是把每個旋轉矩陣乘起來,最後再乘以我們剛開始的初始配置的末端矩陣M
這個例子中,
這是最終的T矩陣
最終的矩陣,就是把每個旋轉矩陣乘起來,最後再乘以我們剛開始的初始配置的末端矩陣M
這個例子中,
 所以
所以
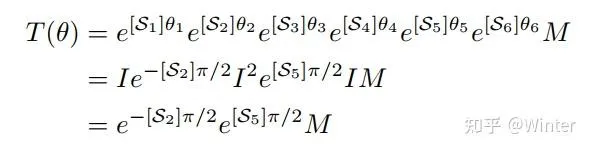 最終
最終
 你可以根據最終這個答案測試一下自己是否計算正確,
步驟是很順利的,但有可能公式看起來比較麻煩一點,但在matlab的程式中是有作者寫的庫檔的,你只需要指定這個軸的方向和這個軸經過的點,以及M,它就可以自己完全計算了,
你可以根據最終這個答案測試一下自己是否計算正確,
步驟是很順利的,但有可能公式看起來比較麻煩一點,但在matlab的程式中是有作者寫的庫檔的,你只需要指定這個軸的方向和這個軸經過的點,以及M,它就可以自己完全計算了,
經過上面三個步驟,我們已經會使用了這種方法,但是為什麽好端端的旋轉矩陣會跟指數扯上關系?更何況這個指數其中的參數竟然還是一個矩陣,
下一章節我們就探討這個問題,用通俗的方法講清楚這個,讓我們心裏有個底
如果覺得對你有幫助,歡迎點贊,或者關註交流
附錄
這個是可以免費下載這本【現代機器人學】電子書的網址
http://
hades.mech.northwestern.edu
/index.php/Modern_Robotics#Book










