在这个问题下,竟然没有人说大名鼎鼎的 KinectFusion以及他后面的一系列工作? KinectFusion单篇论文引用都已经超过3000次了,不应该啊!
如果只想看现阶段效果最好的三维重建算法,请拉到文章最后(如有更好的算法,还请告知)。
一、KinectFusion
帝国理工的Newcombe等人在2011年提出的 KinectFusion, 可在不需要RGB图而只用深度图的情况下就能实时地建立三维模型。KinectFusion算法首次实现了基于廉价消费类相机的实时刚体重建,在当时是非常有影响力的工作,它极大的推动了实时稠密三维重建的商业化进程。

在他们的论文中没有开源代码,最初的代码是由PCL团队实现的:kinectfusion-open-source
KinectFusion的重建效果可以看这个视频:
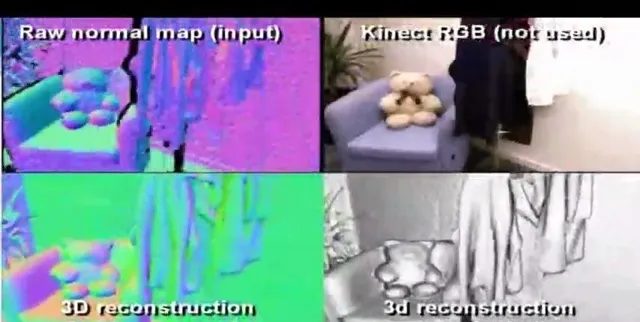 KinectFusion重建效果
https://www.zhihu.com/video/1184501699569471488
KinectFusion重建效果
https://www.zhihu.com/video/1184501699569471488
KinectFusion之后,陆续出现了 Kintinuous,ElasticFusion,ElasticReconstruction,DynamicFusion,InfiniTAM,BundleFusion 等非常优秀的工作。其中2017年斯坦福大学提出的 BundleFusion 算法,据说是目前基于RGB-D相机进行稠密三维重建效果最好的方法。
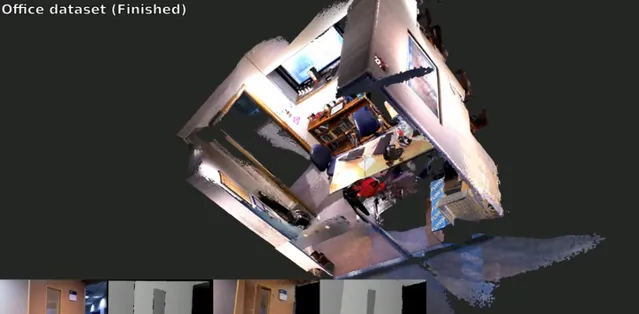
二、Kintinuous和ElasticFusion
这两个工作都是同一个人做出来的,这个人就是 Thomas Whelan。 这两个工作应该算KinectFusion之后影响力比较大的。
Kintinuous GitHub代码:mp3guy/Kintinuous
ElasticFusion GitHub代码:mp3guy/ElasticFusion
Kintinuous2.0重建效果:
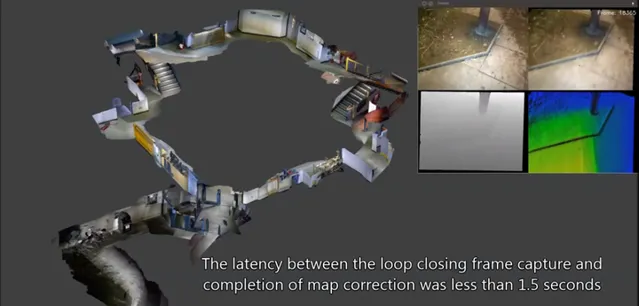
ElasticFusion 重建效果:
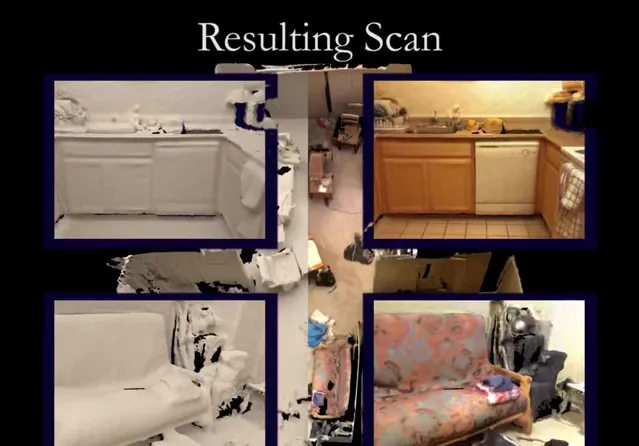
三、ElasticReconstruction
项目官网:http:// qianyi.info/scene.html
GitHub代码:qianyizh/ElasticReconstruction
重建效果:
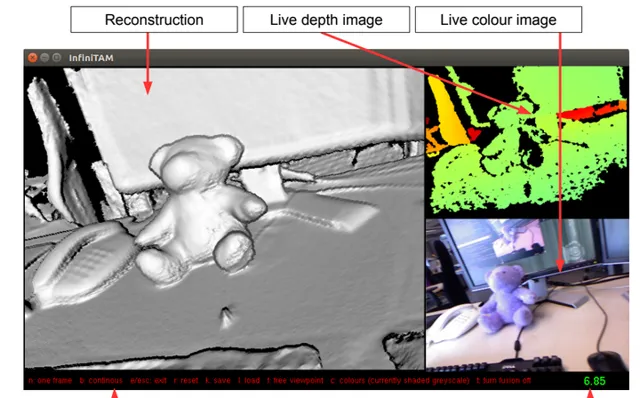
四、InfiniTAM
InfiniTAM提供 Linux,iOS,Android平台版本,CPU可以实时重建 。
官网 : InfiniTAM v3
GitHub代码:victorprad/InfiniTAM
重建效果:
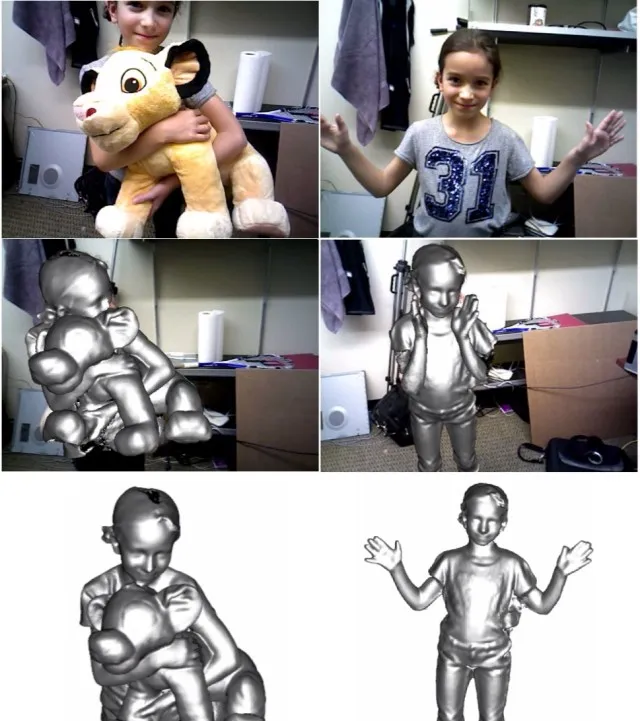
五、DynamicFusion
官网: DynamicFusion Project Page
代码: https:// github.com/mihaibujanca /dynamicfusion
重建效果:
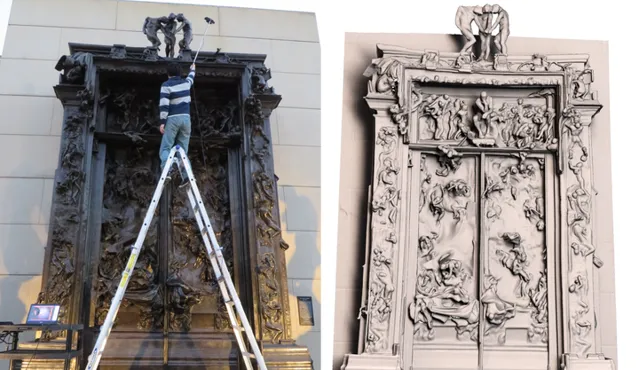
六、BundleFusion
据说是现在重建效果最好的工作!
官网: BundleFusion
论文:https:// arxiv.org/pdf/1604.0109 3.pdf
代码:niessner/BundleFusion
算法解读:计算机视觉方向简介 | 深度相机室内实时稠密三维重建
重建效果:
 BundleFusion:最好的三维重建
https://www.zhihu.com/video/1184509281717673984
BundleFusion:最好的三维重建
https://www.zhihu.com/video/1184509281717673984
最近国防科大张博士也发表了一篇稠密三维重建的文章 (ROSEFusion)。仅依靠深度图作为输入,利用随机优化实现了快速相机下的稠密重建。代码已经开源https:// github.com/jzhzhang/ROS EFusion
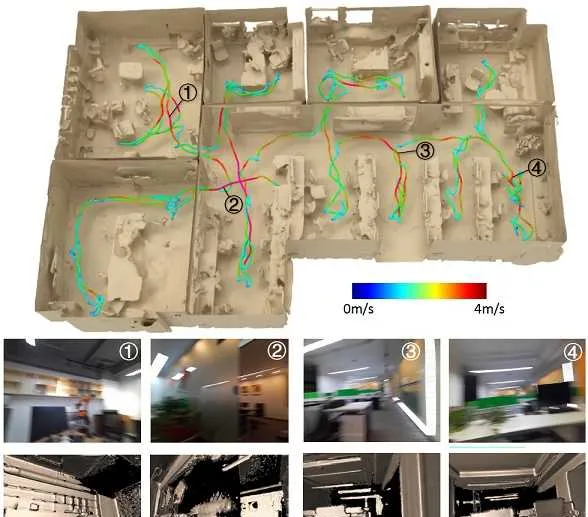
ROSEFusion 能够在仅考虑深度图作为输入的条件下,利用随机优化求解相机位姿,实现了在快速相机移动下的室内场景稠密重建。同时该工作仅依赖深度信息,因此也可以在无光照,和变化光照的条件下使用。 该工作的主要特点是:(a) 利用深度图和TSDF相容性作为代价函数,不需要提取特征点,仅依赖于深度图;(b) 提出了Particle Swarm Template(PST),利用PST可以高效的对相机位姿空间进行采样,并利用随机优化求解出相机的位姿。
倾情整理,建议收藏。
如果能点赞就更好。











