谢@速感科技 邀请。由于我个人的研究方向主要集中在机械臂这块,机器人的其他领域只知皮毛,所以这边也只能结合自己的经验,粗略说一说。
先说结论,【美国机器人路线图2016版】中指出:『在未来10-15年内,我们基本不可能制造出全能的通用机器人』,而我个人也比较认同这一观点。所以,我就猜一个大于15的数字, 大概还需要50年 。
======以下具体说明======
【终结者】系列电影是我最喜欢的科幻电影之一,第一部【终结者】电影还是小学时跟我妈一起看的。但是,即使是1984年的T-800机器人也已经远远强于目前世界上的真实机器人。
要想做出类似T-800性能的机器人,我认为我们现在还有很多路要走。相对于其他技术( 智能手机、VR眼镜、移动支付等),机器人涵盖的技术领域更广。所以,下面我根据机器人的研究领域,分别大概谈谈现在机器人的研究进展与问题。
( 以下非本人熟悉领域的内容均为道听途说,如有误,欢迎在评论区指出 )
其中,T-800机器人的信息基本上来自一个叫做『 终结者百科』 的网站T-800,(现在真是什么网站都有了。。。。)
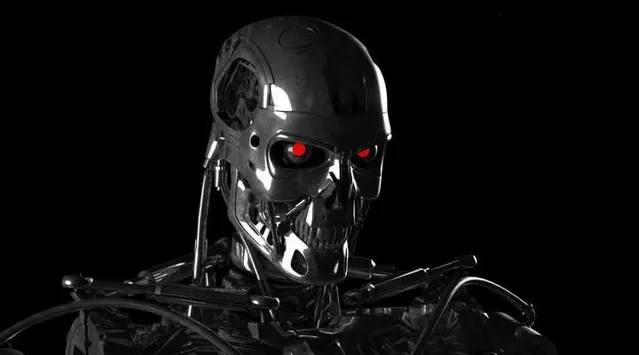
我们先看看T-800吧
可以看出,T-800的机构设计基本 模仿人体 进行自由度分配,骨架为超合金(也称 高温合金 ),另外,驱动器采用的是 液压模块 ;此外, 能源是小型 核反应堆核燃料电池 (可以连续工作120年)。当然,施瓦辛格饰演的T-800具有 人的外貌 。
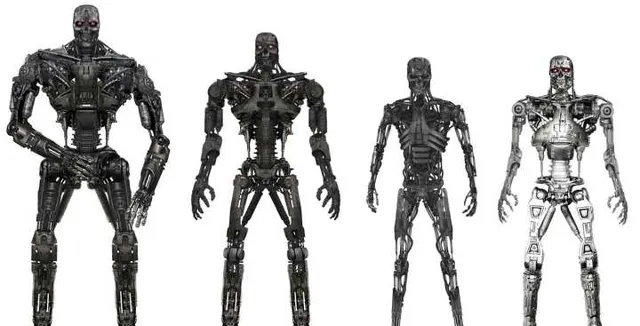
感谢机械前辈们几百年的积累,目前在硬件方面,实际机器人已经不会比T-800差了,甚至可能优于T-800。下面是几个比较著名的真实机器人:

但是,在 能源方面 ,我们离T-800还有一段距离。现在的移动机器人基本上都需要携带一个巨大的电池,续航能力也不行。这方面只能寄希望于新一代电池技术的发明了。
除此之外,T-800在一些细节方面也超过了现在的机器人研究水平:无摩擦轴承、能承受手榴弹攻击的高强度骨骼、包含人体内循环在内的活体组织等。当然,这几个不是人形机器人的必备功能。
这个包括两个部分,一个是传感器,一个是信号处理:
传感器 :机器人需要能够感知周围环境和自身状态,因此需要安装不同的传感器。当然,这里我们不清楚T-800到底安装了哪些传感器,所以简单猜一下:听觉传感器(可以听到声音);多光谱高分辨率相机(能够夜视、放大等);力矩传感器;皮肤触觉传感器(可以感受到别人触碰到自己)。
首先是 听觉传感器 ,这个似乎没有什么特殊的,普通麦克风即可。
其次,是 相机 ,现在机器人的视觉传感器应该比T-800丰富,高精度相机、红外相机、深度相机、激光雷达等等。没办法,算法不够,传感器来凑嘛。
之后,是 力矩传感器 ,主要用于检测关节力矩。有了精确的关节力矩才有可能部署一些控制算法、估计环境状态。当然,现在这样的传感器也已经有了,但就是贵。
最后,也是唯一与T-800有差距的地方,是 皮肤触觉传感器 :这个基本上还有很多路要走,不信的话看看下图吧,这是去年RA-Letter上发表的一篇论文的工作: A Conformable Force/Tactile Skin for Physical Human-Robot Interaction

信号处理算法 :当然,这里的信号处理是广义的信号处理,包括普通的滤波、傅里叶变换等,也包括物体识别、语音识别等人工智能算法。这个话题就太大了,而且我们与T-800差距也非常大,我简单列几个:
物体识别/语音识别 :当然,随着近几年深度学习的发展,我们在物体识别和语音处理方面的造诣已经非常厉害了,从前段时间百度的机器人『小度』在【最强大脑】中的表现可见一斑。

语义理解 :前面的语音识别是指根据声音识别出文字,这里则是理解识别的文字内容。T-800与人类接近的水平就不说了,而我们现在研究的最高水平,可以参考微软小冰聊天机器人,基本还是比较笨的。PS:不要跟我说什么机器人『娇娇』,那是后面有个人在遥控。

环境理解/地图创建 :这个简单地说,就是机器人对环境建模的能力,包括地图创建等。T-800就不说了,已经可以全球到处跑,甚至穿越时空回到从没见过的过去也没问题。相反的,现在的机器人在这一块还是比较弱的,即使配备了激光传感器等额外的设备(T-800只有双目相机),也只能在一些特定条件下完成地图创建,而基于地图的环境理解也只能算刚起步不久,如下面这个语义地图。
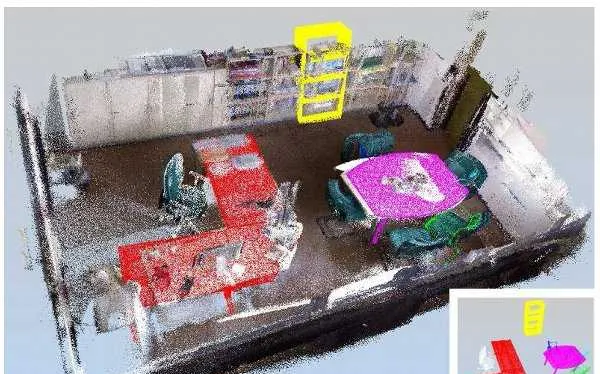
当然,我觉得之后随着深度学习技术在地图创建等领域的应用,(考虑到深度学习对环境理解的能力),这个领域估计有可能在十年内出现可实用的技术。
规划是指根据任务和机器人当前状态,计算出完成这个任务的方法。包括且不限于:任务规划(将大任务划分为几个小的子任务),运动规划(机械臂或者足式机器人各关节运动轨迹),路径规划(其实跟运动规划类似,不过倾向于为移动机器人规划形式路径)。T-800的规划水平已经跟人差不多,所以就不提了,来看看我们现在的机器人吧:
任务规划 :举个例子,我们想让机器人送瓶雪碧,那么机器人会将这个大任务分解成几个子任务(运动到冰箱前-->打开冰箱-->找到雪碧-->拿出雪碧-->关上冰箱-->送到人面前),当然,可以有更复杂的任务。目前,一般是采用MDP或POMDP模型来描述问题,然后用各种规划算法求解。总体上说,现在的任务规划强烈依赖于任务描述方式(人工指定),而且在应对大规模、不完全可观等复杂问题时,还没有可靠的方法。
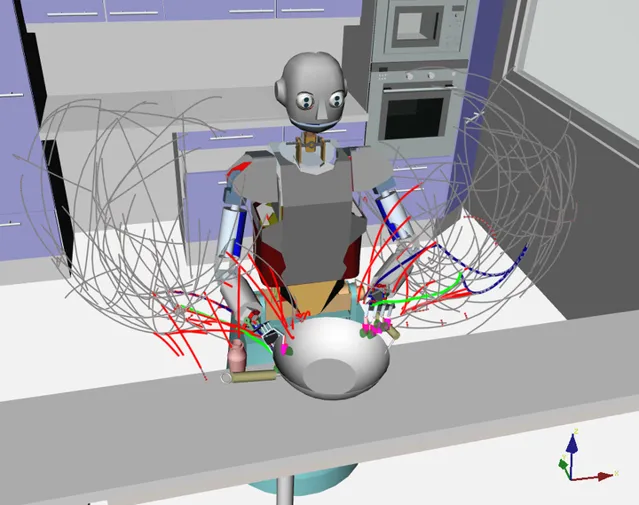
运动规划 :举个例子,机器人面前有一杯水,让机器人将手运动到杯子面前,同时不能碰到桌子等障碍物。这就是运动规划,根据目标状态点,生成一系列关节运动状态。是的, 现在就连让机器人拿起面前的杯子这样的问题也还没有完全解决 。简而言之,我们一般是采用基于随机采样的算法进行运动规划的。随机采样的意思就是:每次规划的结果可能不同,更无法保证规划出的路径是最优的。因为自己就做这一块,所以深知其中的坑。就我个人感觉,要解决运动规划问题,需要一个方法论上的创新,抛弃现在这套方法(因为人肯定不是这样规划的啊)。
路径规划 :其实跟运动规划是一个问题,但由于路径规划一般是在地面上,问题维度低,可以采用一些奇奇怪怪的规划方法(Dijkstra,A*等)。由于问题毕竟简单,这块的发展也比较好,例如各种扫地机器人就已经可以在室内环境中到处跑了。
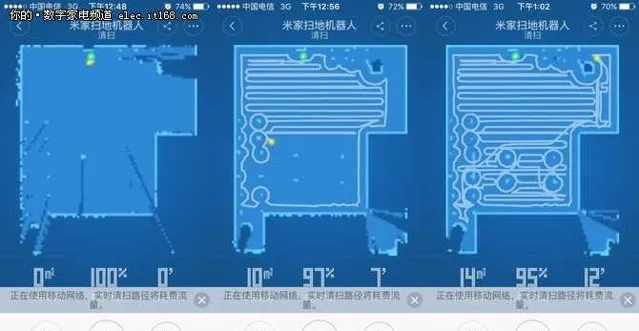
当然,这一块需要解决的问题可能是:①动态环境;②拥挤环境;③复杂地形;④地图不全的环境等。但是估计未来15年左右可以彻底解决,所以到那时候,估计无人驾驶车已经可以到处跑了。
控制 :
控制就是具体执行规划结果的过程了,从底层的电机控制到上层的机器人全身控制都属于这个范畴。我不清楚T-800的控制是怎么做的,但看他可以到处跑、跳,基本可以确定现在的机器人控制技术还没达到这个水平。但我们可以简单看看现在的机器人控制已经什么水平了:
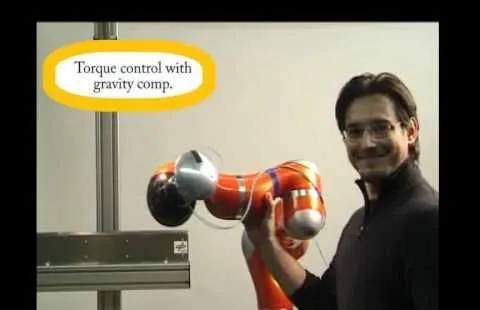
机械臂控制 :下图是大约十年前 Sami Haddadin 做的机械臂碰撞检测的demo,基本上已经非常厉害了。而且,由于机械臂控制属于机器人自身动力学问题,所以目前看来,这一领域可以说已经是完全攻克了。
机械手操作 :但是,机械手的抓取操作问题就没这么简单了,因为其中涉及实际物理环境的建模问题(摩擦力、形状等),由于模型不精确,所以完全基于模型的方法很难解决这一问题。目前实际应用基本还是采用平行夹持器的方式。只有不少研究机构在进行灵巧手抓取方面的研究。

足式机器人控制 :这是更难的地方了,因为机械臂和机械手都至少有个相对固定的基座。足式机器人的base是会随着接触而发生变化的。所以,我一直觉得能做足式机器人控制的人都是很厉害的人。虽然很难,但还是有一些逆天的公司做出了不错的足式机器人】。

上面这几个足式机器人真的已经超级厉害了,但是它们跟T-800比起来,依旧还是渣渣。
这个属于另外一大块内容,由于可以应用到其他领域(控制、规划、感知等),所以有时候不能单独列为一类。众所周知,现在深度学习很厉害了,但依旧需要依赖大量标记数据。
我之前在另一个回答(小扎说人工智能仍需要人类给出足够的引导,机器人需要完成「无人指导下的学习」,目前这种理论目前是否存在? - fly qq 的回答 - 知乎)中提到过,机器学习分为监督学习、无监督学习和强化学习三类。目前,深度学习主要在监督学习方面得到了很好的应用;此外,对于强化学习,也逐渐以Deep Q Learning等形式出现;但无监督学习才是机器学习中的最高挑战。
T-800在电影中能学习微笑等奇怪的技能(也可以直接从数据库中下载知识学习),正得益于其超强的学习能力。而其能根据数据库中的人体解剖信息,习得如何高效杀死人类(根据『终结者百科』),说明其已经具有了较强的无监督学习能力。

当然,机器学习的坑还有很多。因为,正是不断学习让我们能够面对不断变化的环境。这方面可挖的东西太多了。
这个就是机器人与人交互的问题。包括识别人、与人交流、与人协作。在这个角度看,T-800已经跟常人无异(甚至强于人类)。但是,我们现在的机器人则还不尽如人意:
识别人 :虽然人体识别在机器视觉中已经有了很多成果,但是在人机交互过程中,机器人不仅要识别到人的存在,还应该要能判断人的动作、意图,并作出相应反馈。
与人交流 :这方面,T-800早已经通过『图灵测试』了(可以混入人类军队);而我们的聊天机器人虽然也已经做得不错了,但离通过『图灵测试』还很远,随便一个普通人都能轻易判断出对面是一个机器人。
与人协作 :这个就不说了,T-800不仅可以与人一起做简单的协同工作,还能够给人分配工作。。。。;而我们真实的机器人还只能这样:

容错性 :
这个就是说机器人的软硬件发生故障后,依旧可以自适应地完成部分工作,我们比T-800还是差很多:
T-800是这样的:融解得只剩手了,还能给你点赞。

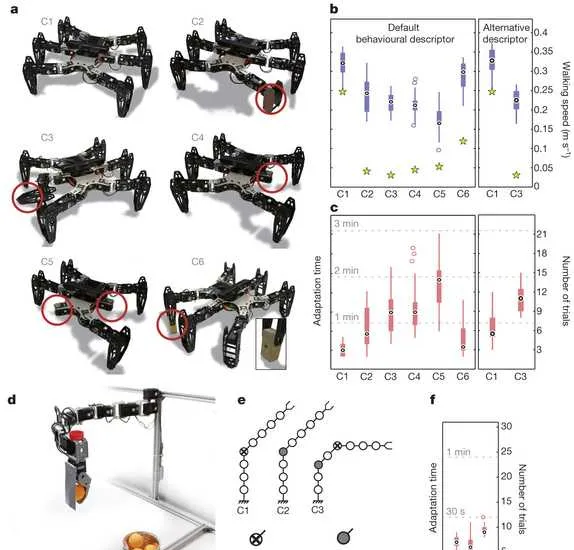
我们的机器人最强只能这样:
2014年发表在Nature的成果,只是简单的机构损坏、核心部件完好。
综上,要想做到跟【终结者】中的T-800那样的通用机器人,我们还有非常非常非常远的路要走,前面说的50年都已经是很乐观的估计了 。
当然,要想在十年内做出这样的机器人也不是不可能,例如忽然来了一群奇怪的人说要教我们机器人技术:












