大家好,我是 @森山 ,清洁电器平时一直有关注,在几个月前,我就写过一篇关于扫地机的产品建议:
我曾经提出过5条建议:
其中第2点建议,我在云鲸J3上已经看到了雏形功能,它的鲸灵模式,会判断脏污浓度,没清理干净时会继续清理。
1、吸口与边刷的设计优化建议
清洁性能的提升,扫地的吸力已经够了,关键是扫地的盲区,以及边刷弹飞问题。

以及扫地吸口小于机身宽度的问题。

再补充一个,D型吸口,且吸口在前沿,覆盖整体宽度。
上图是我琢磨出的吸口方案,边刷弹飞的问题可以有效解决。
全宽度吸口的可能性并不大,因为设计到内部结构设计,已经塞满了,扩大吸口不太可能。
单靠边的吸口方案,不增加吸口宽度,不增加内部结构,只是移动了风口位置,这样可以有效解决沿边清扫问题。
而上面提到的边刷,还是要保留,是为了墙角清洁时,开启边刷的电机,弥补机器本身的吸口无法覆盖角落问题,而且即使边刷把角落的灰尘弹飞了,也会大概率弹回来。
在 平时扫地时,边刷可以不转,拖地时也不要转,最好能抬起。
2、扫地机需要有自己发现脏污的能力
目前的扫地机还是比较初级的智能化,本质上还是一个遥控加自动化的设备,没有自己的主动思维,需要主人下达命令去执行清洁任务,而且在扫地拖地时,是盲扫盲拖,到底干净不干净其实扫地机自身没有判断和反馈的。
但如何去发现室内地面脏了呢?
这就要 利用我们前面提到的机器视觉,图像识别技术,我认为这是现阶段最可能实现的方案。
我描述下我的设想:
3、扫地机的尘气分离性能要提升
在其他回答和文章中,我多次提到这个问题,三星的扫地机已经有了这个设计,目的就是不会让你的扫地机吸力快速衰竭,不需要你频繁更换和清洗滤网。
因为长期研究吸尘器的关系,这个技术我非常关注,希望厂家能重视,一款扫地机好不好,长期稳定的吸力非常重要,如果吸力不足,扫地就会变差,其他方面再好也是徒劳。
4、扫拖功能可以兼备,但还是要分时操作
最简单的逻辑,扫地时不能拖地,拖地时扫地也扫不干净,特别是地上有较多毛发和灰尘时。
这一点就不赘述了,是从自己测试大量洗地机和扫地机,包括吸尘器中无一例外的体会。
具体的实现也不难,边刷、滚刷和擦地头要有抬起的机械结构:
通过分时抬起边刷和滚刷,并关闭吸尘电机,只执行拖地任务。
通过抬起拖布,关闭擦地电机,开启滚刷和吸尘电机,间歇性开启边刷,只执行扫地任务。
扫地机不是应急处理机器人,它的时效性要求并不像洗地机那么高,没人的时候打扫甚至更好,所以分时操作既合理,也不太影响体验。
5、尽可能缩小机身尺寸
由于机器功能的一再增加,不管D型还是圆型扫地机,现在的机身直径在慢慢变大,使得它的通过性变差。
接着几个月前对扫地机产品的建议,我再补充一些:
6、加入尘盒状态检测和提示
我家里的几台扫地机都没有这个功能,我不清楚是不是目前大部分扫地机没有该功能,这个功能挺重要,因为我发现好几次,扫地机在那里空跑,结果垃圾没清理掉,基站周围掉落很多垃圾,起初以为吸力下降,检查后发现尘盒满了,这个功能并不会很难,但真的实用。
最简单的办法,就是把机器热顶部做成透明可视化,用户很容易获取尘盒是否满的状态,及时清理:

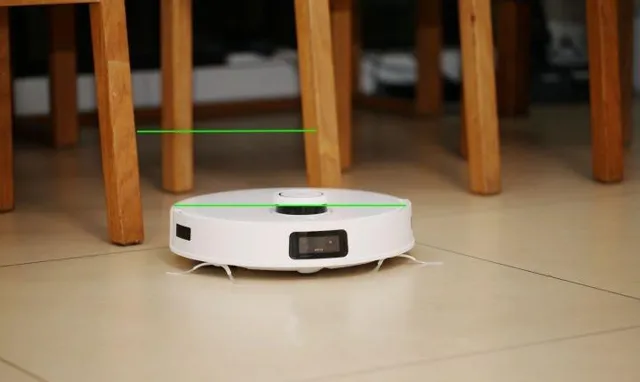
7、视觉算法的不断提升
不管是单目视觉、双目视觉、结构光、深度视觉等SLAM技术,最后都是为了对周围环境障碍物的图像识别,目前行业领先的产品,识别物体模型不超过百种,识别率也不高,这对于复杂的多变的家庭地面场景,无法做到特别好的避障性能,用户使用时总会出现这样或者那样的问题,我自己的一台PC主机就因为扫地机无法识别地上的电源线,被扫地机硬拉后摔倒,硬盘损毁。
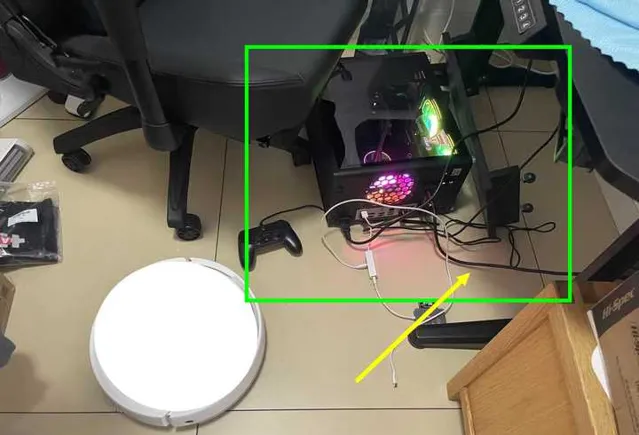
这种电源线的识别有困难,对传感器的技术类型和安装位置都有较高的要求,但毕竟会带来严重的后果,所以这块的技术点急需升级改善。
不管采用哪些硬件传感方案,希望扫地机的研发人员,能尽快将 低矮障碍物的识别种类,提升到100种以上 ,覆盖常见的物品,特别是细线类,并且 黑色和透明物体的识别短板能完善 。
8、智能家居功能的拓展
扫地机有一个独一无二的功能是目前其他智能家居产品中所不具备的,就是它带有」行动功能「。
这会给扫地机的创新功能带来一些想象力:
我认为,真正的智能家居产品,并不在于它的」遥控「功能,而是」感知「能力,通过不同类型的传感器获取室内环境的各种信息,并做出相应的决策是最核心的要素。
因为只有感知了环境中的数据变化,才会有自动执行的下一步,这才是真」智能「。
所以,对于扫地机,我提几个未来有可能的有关智能家居的」异想天开「的升级点:
9、扫地机基站形态的优化
现有的扫地机产品在形态上同质化严重,我比较担心的是越来越大的机身和基站,越来越占据本来就不大的中国家庭,同时我也调研过一些具有前沿设计的扫地机品牌,比如松下的一个预言设计,基站的垂直收纳吸附,节省了将近一半的占地空间:

本回答会陆续补充一些新的观点,有兴趣的可以追更。
其实,扫地机目前的技术创新,重点在于避障技术,本回答中提及较少,因为展开来内容会比较多,所以在其他回答中我专门针对这一块写过较为详细的分享:
关于避障、导航定位所涉及到的传感器,我认为目前已经很难再有新的升级,扫地机是一个弱化版的自动驾驶技术,LDS、TOF、结构光技术这些都是从工业和汽车领域转移过来,而我们看到的工业、汽车领域目前也没有太前沿的新的创新点,毫米波雷达也许是个新的突破口,TI和英飞凌都在推相应的芯片解决方案,但是还比较遥远,成本很高,性能不成熟。
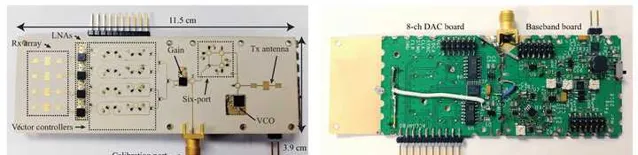
面阵TOF曾经短期出现在两款扫地机上,但是由于较大的功耗、发热、几倍的成本问题,以及这种技术对于校准、标定的技术难度、算法的技术难度,目前也没有得到普及性的应用,所以技术难度类似的毫米波雷达,我觉得短期内也比较难。











