概述
在使用机器人虚拟仿真软件做点焊工艺应用仿真时往往需要从外部导入焊点坐标数据,这些焊点坐标数据一般都是CSV格式文件。
设计人员给出的焊点数据大部分都是CAD模型,仿真人员需要按照自己的需要使用机械设计软件导出焊点坐标数据,几乎所有具备3D模型设计功能的机械设计软件都能够导出焊点坐标数据,如CATIA、NX、Pro/E等。
前一段时间为大家介绍过CATIA软件导出点焊焊点坐标数据的操作方法,这一次再来介绍一下NX软件导出点焊焊点坐标数据的操作方法。
NX软件有多种导出焊点坐标数据的方法,概括起来可以分为生成焊点模型导出法、编写宏程序导出法以及二次开发插件导出法。其中,生成焊点模型导出法最为简单,在焊点量较少的情况下应用最为广泛,以下详细介绍。
NX软件版本: NX 1942。
创建点模型
在NX软件中打开焊点模型,焊点模型有小球体也有圆柱体,还有的焊点模型直接就是点模型,本例以小球体焊点模型为例进行介绍。
点击「曲线」菜单,然后在「基本」命令组中点击「点」命令按钮,在弹出的点对话框中选择点的创建参考为「圆弧中心/椭圆中心/球心」,然后用鼠标在软件工作区中点击焊点小球模型的球体表面,焊点模型被成功选取后焊点模型球心处出现点预览模型,同时点对话框的选择对象后的括号内出现数字「1」。

点击应用按钮,点创建完成。依次选取剩余的焊点小球模型,在其中心位置创建点。全部创建完成后,隐藏软件工作区的焊点小球模型,创建的点模型全部显示出来。

生成焊点模型
点击「应用模块」菜单,在「设计」命令组中点击「工具箱」命令按钮,然后在弹出的下拉菜单中点选「焊接助理」,软件菜单栏中出现焊接助理菜单。
在「焊接助理」菜单栏下的「点焊」命令组中点击「焊点向导」命令按钮,弹出焊点向导对话框。
对话框默认为「选择构造和更新方法」界面,在方法后选择「现有点」,即以现有的点模型为参考对象创建点焊焊点模型,点击下一步按钮。

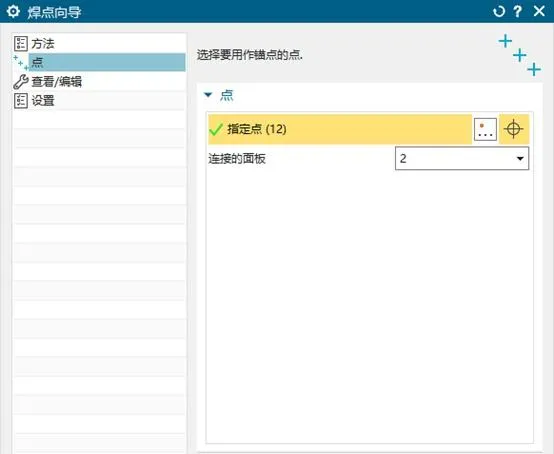
对话框切换到「选择要用作锚点的点」界面,可以直接在软件工作区框选已创建的全部点模型,成功选取后指定点后的括号内显示已选取的点数量,本例为「12」,点击下一步按钮。
对话框切换到「指定属性并重定义点位置」界面,同时软件工作区点模型上出现坐标系,此坐标系原点坐标就是焊点的坐标。

观察坐标系的原点位置、坐标轴指向,一般情况下保证每个焊点坐标系的Z轴与焊接板件平面垂直即可(可以同时把焊接板件导入NX软件,以作参考)。如果需要修改,可以在对话框中使用相应的功能进行修改。确认无误后,直接点击下一步按钮。

对话框切换为「指定点的设置」界面,取消选择「运行相邻面查找器」功能选项,然后点击完成按钮。

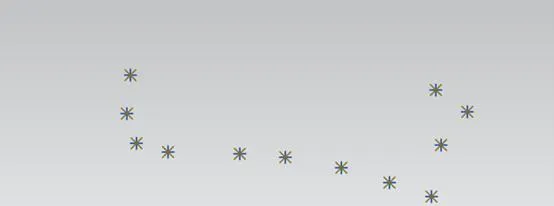
软件工作区的每一个蓝色点模型上都出现创建的黄色焊点模型。
导出焊点数据为CSV文件
在「焊接助理」菜单栏下,「实用工具」命令组中点击「导出CSV文件」命令按钮,弹出导出CSV文件对话框。
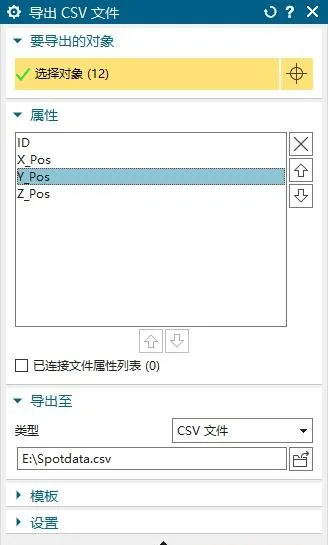
软件工作区框选生成的所有焊点模型,选取成功后对话框里选择对象后的括号内出现选择的焊点模型个数,本例为「12」。为了方便选择焊点模型,可以先把点模型全部隐藏。
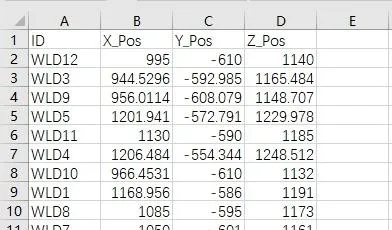
对话框的属性下,可以根据需要选择要导出的数据属性选项,一般只选取「ID」、「X_Pos」、「Y_Pos」、「Z_Pos」,并对属性选项合理排序。
导出的文件类型选择「CSV文件」,设定导出文件的保存目录以及文件名称,其他参数全部保持默认,然后点击确定按钮,焊点数据即被导出,并生成CSV格式文件。
焊点数据CSV文件查看
在指定的焊点数据文件保存目录中,使用Excel软件就可以打开导出的CSV格式文件。
The End
上一篇:











