傾情整理,建議收藏。曹力科
話不多說,請看:
一、Facebook 的PyRobot
。

推出時間:2019年。GitHub Star數量:1.1K。語言:Python
。
地址:facebookresearch/pyrobot
PyRobot 框架由 Facebook 和卡內基梅隆大學共同開發,可以執行由
PyTorch 訓練的深度學習模型。
在設計上,PyRobot 框架旨在使 AI 研究者和學生在不具備裝置驅動程式、控制或規劃專業知識的情況下,在幾小時內操控機器人工作。
下面是他的演示:
 導航
導航
 機械臂抓取
機械臂抓取
 碼垛
碼垛
二、PythonRobotics。
用Python實作機器人學的相關演算法。包含SLAM演算法、導航演算法、軌跡規劃、機械臂導航、雙足演算法等。
GitHub Star數量:7.2K。
地址:https://
github.com/AtsushiSakai
/PythonRobotics
三、Pixhawk及其配套計畫。
Pixhawk是一個獨立的開源硬體計畫,旨在為學術界、業余愛好者和開發者社群提供現成的、高品質的、低成本的
自動駕駛儀(常用於無人機)硬體設計標準
。最初出自蘇黎世理工(2008年)。現在已經是
第四代
了(Pixhawk 4)。長下面這樣的。
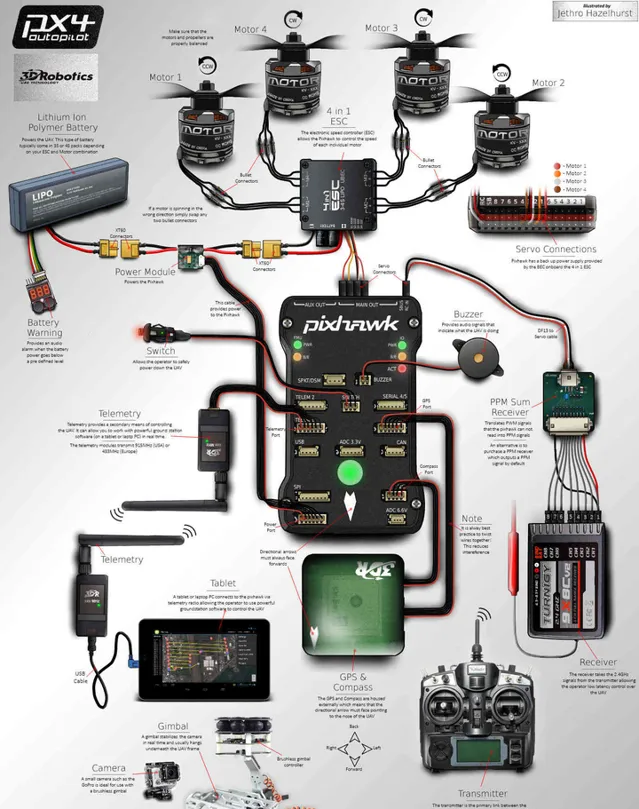
基本上需要自動駕駛(飛控)等需要用到的硬體和介面它都提供了。它采用2塊STM32,一塊做核心主控,另一塊做IO處理。它提供豐富的傳感器,加速度計、陀螺儀、磁力計、氣壓計、GPS等。它的介面也很豐富,從圖片上就能看出來。
和Pixhawk配套的開源軟體主要有PX4和ArduPilot。其中PX4在GitHub上有3K的Star,ArduPilot在GitHub上有4.5K的Star。
劃重點:Pixhawh是一款開源的自動駕駛儀硬體。和Pixhawk配套的開源軟體主要有PX4和ArduPilot。
Pixhawk硬體github地址:
Pixhawk
PX4飛控軟體GitHub地址:
PX4/Firmware
ArduPilot飛控軟體GitHub地址
:ArduPilot/ardupilot
Pixhawk官網
:Home Page
PX4官網
:https://
px4.io/
ArduPilot官網
:http://
ardupilot.org/
 Pixhawk測試效果
https://www.zhihu.com/video/1182695321850769408
Pixhawk測試效果
https://www.zhihu.com/video/1182695321850769408
四、語音對話機器人/智慧音箱。
語音對話機器人介紹兩款:叮當和悟空。
叮當是一款可以工作在樹莓派上的中文語音對話機器人/智慧音箱計畫。
GitHub Star數量:1.6K。
地址:dingdang-robot
悟空是一個簡單、靈活、優雅的中文語音對話機器人/智慧音箱計畫。
GitHub Star數量:1.4K。
地址:wukong-robot
五、其他
5.1 MVision
MVision是一個機器人視覺的資料庫,包括移動機器人、VS-SLAM、ORB-SLAM2、深度學習目標檢測、yolov3、行為檢測、opencv、PCL、機器學習以及無人駕駛等。
GitHub Star數量:3.4K。
地址:Ewenwan/MVision
5.2 gobot
機器人、無人機、物聯網等演算法在Golang框架下的實作。
GitHub Star數量:5.9 K
。
地址:hybridgroup/gobot
5.3 Awesome Robotics。
這是一個收集了包含機器人學相關的
課程、書籍、軟體、會議、期刊、比賽、行業公司
等資訊的計畫。
GitHub Star數量:1.4K
。
地址:awesome-robotics
在計畫的後面,還列出了相關領域(如人工智慧、電腦視覺、機器學習等)出色的計畫:
Awesome Artificial Intelligence
Awesome Computer Vision
Awesome Machine Learning
Awesome Deep Learning
Awesome Deep Vision
Awesome Gazebo
Awesome Reinforcement Learning
Awesome Robotics
Awesome Robotics Libraries
Awesome ROS2
其中提到的部份計畫如下:
機器人仿真
V-REP - Create, Simulate, any Robot.
Microsoft Airsim - Open source simulator based on Unreal Engine for autonomous vehicles from Microsoft AI & Research.
Bullet Physics SDK - Real-time collision detection and multi-physics simulation for VR, games, visual effects, robotics, machine learning etc. Also see pybullet.
視覺化,顯示、渲染
Pangolin - A lightweight portable rapid development library for managing OpenGL display / interaction and abstracting video input.
PlotJuggler - Quickly plot and re-plot data on the fly! Includes optional ROS integration.
Data Visualization - A list of awesome data visualization tools.
機器學習
Keras - Deep Learning library for Python. Convnets, recurrent neural networks, and more. Runs on TensorFlow or Theano.
keras-contrib - Keras community contributions.
TensorFlow - An open-source software library for Machine Intelligence.
recurrentshop - Framework for building complex recurrent neural networks with Keras.
tensorpack - Neural Network Toolbox on TensorFlow.
tensorlayer - Deep Learning and Reinforcement Learning Library for Researchers and Engineers.
TensorFlow-Examples - TensorFlow Tutorial and Examples for beginners.
hyperas - Keras + Hyperopt: A very simple wrapper for convenient hyperparameter optimization.
elephas - Distributed Deep learning with Keras & Spark
PipelineAI - End-to-End ML and AI Platform for Real-time Spark and Tensorflow Data Pipelines.
sonnet - Google Deepmind APIs on top of TensorFlow.
visipedia/tfrecords - Demonstrates the use of TensorFlow's TFRecord data format.
影像分割
tf-image-segmentation - Image Segmentation framework based on Tensorflow and TF-Slim library.
Keras-FCN
跟蹤
simtrack - A simulation-based framework for tracking.
ar_track_alvar - AR tag tracking library for ROS.
artoolkit5 - Augmented Reality Toolkit, which has excellent AR tag tracking software.
運動學、動力學、約束最佳化
jrl-umi3218/Tasks - Tasks is library for real time control of robots and kinematic trees using constrained optimization.
jrl-umi3218/RBDyn - RBDyn provides a set of classes and functions to model the dynamics of rigid body systems.
ceres-solver - Solve Non-linear Least Squares problems with bounds constraints and general unconstrained optimization problems. Used in production at Google since 2010.
orocos_kinematics_dynamics - Orocos Kinematics and Dynamics C++ library.
flexible-collsion-library - Performs three types of proximity queries on a pair of geometric models composed of triangles, integrated with ROS.
robot_calibration - generic robot kinematics calibration for ROS
校準工具
handeye-calib-camodocal - generic robot hand-eye calibration.
robot_calibration - generic robot kinematics calibration for ROS
kalibr - camera and imu calibration for ROS
強化學習
TensorForce - A TensorFlow library for applied reinforcement learning
gqcnn - Grasp Quality Convolutional Neural Networks (GQ-CNNs) for grasp planning using training datasets from the Dexterity Network (Dex-Net)
Guided Policy Search - Guided policy search (gps) algorithm and LQG-based trajectory optimization, meant to help others understand, reuse, and build upon existing work.
數據集
CoSTAR Block Stacking Dataset - Robot stacking colored children's blocks (disclaimer: created by @ahundt)
shapestacks - simulated stacks of colored children's objects
pascal voc 2012 - The classic reference image segmentation dataset.
openimages - Huge imagenet style dataset by Google.
COCO - Objects with segmentation, keypoints, and links to many other external datasets.
cocostuff - COCO additional full scene segmentation including backgrounds and annotator.
Google Brain Robot Data - Robotics datasets including grasping, pushing, and pouring.
Materials in Context - Materials Dataset with real world images in 23 categories.
Dex-Net 2.0 - 6.7 million pairs of synthetic point clouds and grasps with robustness labels.
cocostuff - COCO additional full scene segmentation including backgrounds and annotator.
線性代數 & 幾何
Eigen - Eigen is a C++ template library for linear algebra: matrices, vectors, numerical solvers, and related algorithms.
Boost.QVM - Quaternions, Vectors, Matrices library for Boost.
Boost.Geometry - Boost.Geometry contains instantiable geometry classes, but library users can also use their own.
SpaceVecAlg - Implementation of spatial vector algebra for 3D geometry with the Eigen3 linear algebra library.
Sophus - C++ implementation of Lie Groups which are for 3D Geometry, using Eigen.
點雲
libpointmatcher - An "Iterative Closest Point" library robotics and 2-D/3-D mapping.
Point Cloud Library (pcl) - The Point Cloud Library (PCL) is a standalone, large scale, open project for 2D/3D image and point cloud processing.
SLAM
ElasticFusion - Real-time dense visual SLAM system.
co-fusion - Real-time Segmentation, Tracking and Fusion of Multiple Objects. Extends ElasticFusion.
Google Cartographer - Cartographer is a system that provides real-time simultaneous localization and mapping (SLAM) in 2D and 3D across multiple platforms and sensor configurations.
OctoMap - An Efficient Probabilistic 3D Mapping Framework Based on Octrees. Contains the main OctoMap library, the viewer octovis, and dynamicEDT3D.
ORB_SLAM2 - Real-Time SLAM for Monocular, Stereo and RGB-D Cameras, with Loop Detection and Relocalization Capabilities.
先到這裏吧,以後有好的計畫再更新。
別都只顧收藏啊!盡情點贊,不必客氣!
曹力科












