Dupont, P. E., Nelson, B. J., Goldfarb, M., Hannaford, B., Menciassi, A., O’Malley, M. K., ... & Yang, G. Z. (2021). A decade retrospective of medical robotics research from 2010 to 2020. Science Robotics, 6(60), eabi8017. DOI: 10.1126/scirobotics.abi8017
声明:本文内容根据本人理解有所调整。
医疗机器人技术是一种前沿性的学科,其未来发展方向受到了极大的关注。理解近期的研究成果与临床需求以及商业化进度,对于未来医疗机器人的研究规划十分重要。根据过去十年科研文章引用率可以确定过去十年医疗机器人的技术研究与发展集中在8个关键主题。未来研究学者应该平衡技术研究与应用需求之间的关系,从而推动机器人技术健康的发展趋势。参考文献中绝大多是是临床实验结果的报告,只有不足25%的文章是关于工程描述的。
三十多年前,人们采用工业机器人做了第一台手术。二十多年前,手术机器人在装配到医院中开始科学实验。过去十年内,医疗机器人飞速发展,全球数以千计的机器人手术系统已经进入临床,并开展了百万级的机器人手术。手术机器人已经成为医疗领域未来的技术发展方向。当然,除了手术机器人,康复型机器人以及健康监护系统也是医疗体系未来研究和发展的趋势。
医疗机器人最早是采用远程控制形式,并以提高操作精度作为研发目标,并最早应用于神经外科手术和骨科。第一台真正意义的远程是20年前跨大西洋的胆囊手术。虽然早期的技术并不稳定,但是新技术的集成,手术机器人必将推动医疗健康产业重要的发展。
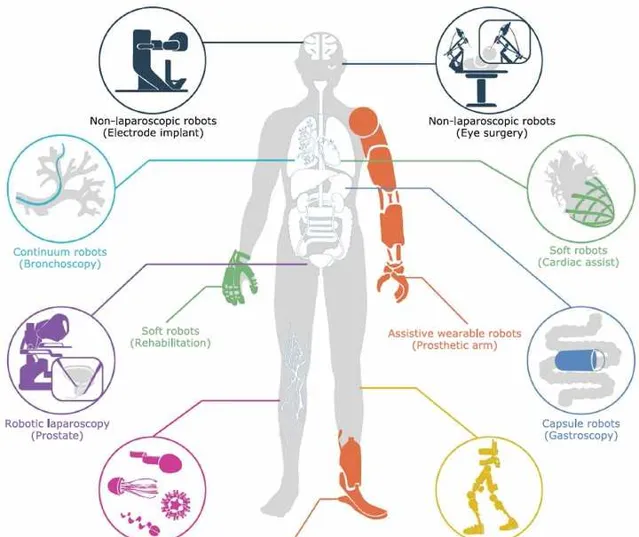
热门主题:
过去十年中,腹腔镜机器人占据了绝对主角,但是磁驱以及其所代表的微纳机器人在工程以及临床中的论文正在成指数趋势增长,其在临床中的应用前景也受到了广泛关注。
软体机器人目前正在飞速的发展,研究学者普遍认为软体机器人在医疗领域的应用未来可期。
相比较而言,连续体机器人在1990年以前至今一直不温不火,所以连续体机器人的机械设计并不是目前的研究热点,而数学建模才是研究的重点,因为临床需要严格的控制精度。由于商业效果,连续体机器人的研究热度正在逐年下降。但是Intuitive Surgery的Ion机器人系统的成功触发了连续体机器人未来的发展动力。
胶囊机器人是八大热门领域中热度最低的,虽然它的性能在近十年来发展迅速,但是它在临床中的应用价值还有待于进一步的验证。目前软体胶囊机器人更多的是作为磁驱式的,未来将作为肠胃系统无损诊断、治疗的手段(其实,国内外都已经实现了多种商业化胶囊机器人作为肠胃诊断、治疗方法)。
腹腔镜手术机器人
因为达芬奇手术机器人成功的商业化示范,无论从临床、商业化和学术圈,腹腔镜机器人是目前最大的热门。同时,围绕根治性前列腺切除术、膀胱癌根治性膀胱切除术、直肠癌切除术、子宫切除术作为性能比对试验。
过去十年,五十多种手术工具专为达芬奇手术机器人研发,促进了达芬奇手术机器人的快速发展,并形成了绝对的技术壁垒。因此,大型医疗机器人公司开始与直觉公司在此赛道上开展业务竞争。
过去十年学术研究主要集中两大方向:腹腔镜平台的性能增强,主要是增强腹腔镜的自动化程度,并将力感知集成到工具中促进连续作业。第二个研究方向是设计能够降低创伤的新机器人架构。例如单孔镜受到了越来越多的关注。
微型手术Microsurgery
视网膜手术带来的对于手工手术系统现有性能的特别挑战,为了解决这些挑战提出三种解决方案:1)手持设备的振动抑制;2)合作式机器人,3)遥操作机器人。
未来的技术发展
新一轮的医疗系统将关注电极阵列面积和植入的发展,以及对软体机器人的控制以及磁驱机器人导航平台的研究。为了支持这些技术能够走进临床,需要自适应的手术协作控制与术中感知技术等理论技术的支撑。
辅助型穿戴机器人
穿戴机器人学领域关注设计与穿戴设备的控制,从而改善运动性能,从而促进个体运动神经功能的修复。这就包括面向中风和脊柱神经损伤后的上肢、下肢、手指等功能的重建进一步,与脑机、肌肉等神经接口融合是当前技术发展的主要形式,通过模式识别感知神经意图并控制穿戴设备实现平滑运动。这一研究方向目前的效果让人们对它未来的发展充满了期待。对于康复训练型机器人,与健康大数据相结合的技术路线是主要的研究法向。软体机器人是一种物理实现形式,其未来的研发前景将极大受限于材料等因素的影响。
总而言之,未来穿戴机器人最大的研究方向在于加强与类脑机接口的信息融合。
胶囊机器人
未来胶囊机器人的发展在于进一步缩小体积,比如通过体外驱动技术、无动力源改进,例如磁驱与磁导航技术的集成。未来十年,联合多模态影像的微型胶囊机器人的智能磁场控制是主要的研究课题。
磁驱动医疗机器人
本质上属于磁驱动的微纳机器人。具体包括多自由度电磁导航系统建模、磁场引导技术、磁导航纤维机器人、微米级的此驱动运动控制策略(面向各类运动速度)。
软体医疗机器人
软体机器人除了直观上的穿戴辅助外,在医疗方面更值得关注的研究课题包括:
- 面向手术和介入的软体设备,包括软体连续体、软体胶囊;
- 软体、仿生、柔顺结构,能够集成到现有复杂系统中的元件,主要是面向环境交互任务。
- 面向先进仿真的软体结构和系统。
连续体医疗机器人
医疗机器人技术的进化趋势必然是朝着自动化趋势推进的,其本质是控制系统与生理环境的交互适应。










