大家好,我是 @森山 ,清潔電器平時一直有關註,在幾個月前,我就寫過一篇關於掃地機的產品建議:
我曾經提出過5條建議:
其中第2點建議,我在雲鯨J3上已經看到了雛形功能,它的鯨靈模式,會判斷臟汙濃度,沒清理幹凈時會繼續清理。
1、吸口與邊刷的設計最佳化建議
清潔效能的提升,掃地的吸力已經夠了,關鍵是掃地的盲區,以及邊刷彈飛問題。

以及掃地吸口小於機身寬度的問題。

再補充一個,D型吸口,且吸口在前沿,覆蓋整體寬度。
上圖是我琢磨出的吸口方案,邊刷彈飛的問題可以有效解決。
全寬度吸口的可能性並不大,因為設計到內部結構設計,已經塞滿了,擴大吸口不太可能。
單靠邊的吸口方案,不增加吸口寬度,不增加內部結構,只是移動了風口位置,這樣可以有效解決沿邊清掃問題。
而上面提到的邊刷,還是要保留,是為了墻角清潔時,開啟邊刷的電機,彌補機器本身的吸口無法覆蓋角落問題,而且即使邊刷把角落的灰塵彈飛了,也會大概率彈回來。
在 平時掃地時,邊刷可以不轉,拖地時也不要轉,最好能擡起。
2、掃地機需要有自己發現臟汙的能力
目前的掃地機還是比較初級的智能化,本質上還是一個遙控加自動化的器材,沒有自己的主動思維,需要主人下達命令去執行清潔任務,而且在掃地拖地時,是盲掃盲拖,到底幹凈不幹凈其實掃地機自身沒有判斷和反饋的。
但如何去發現室內地面臟了呢?
這就要 利用我們前面提到的機器視覺,影像辨識技術,我認為這是現階段最可能實作的方案。
我描述下我的設想:
3、掃地機的塵氣分離效能要提升
在其他回答和文章中,我多次提到這個問題,三星的掃地機已經有了這個設計,目的就是不會讓你的掃地機吸力快速衰竭,不需要你頻繁更換和清洗濾網。
因為長期研究吸塵器的關系,這個技術我非常關註,希望廠家能重視,一款掃地機好不好,長期穩定的吸力非常重要,如果吸力不足,掃地就會變差,其他方面再好也是徒勞。
4、掃拖功能可以兼備,但還是要分時操作
最簡單的邏輯,掃地時不能拖地,拖地時掃地也掃不幹凈,特別是地上有較多毛發和灰塵時。
這一點就不贅述了,是從自己測試大量洗地機和掃地機,包括吸塵器中無一例外的體會。
具體的實作也不難,邊刷、滾刷和擦地頭要有擡起的機械結構:
透過分時擡起邊刷和滾刷,並關閉吸塵電機,只執行拖地任務。
透過擡起拖布,關閉擦地電機,開啟滾刷和吸塵電機,間歇性開啟邊刷,只執行掃地任務。
掃地機不是應急處理機器人,它的時效性要求並不像洗地機那麽高,沒人的時候打掃甚至更好,所以分時操作既合理,也不太影響體驗。
5、盡可能縮小機身尺寸
由於機器功能的一再增加,不管D型還是圓型掃地機,現在的機身直徑在慢慢變大,使得它的透過性變差。
接著幾個月前對掃地機產品的建議,我再補充一些:
6、加入塵盒狀態檢測和提示
我家裏的幾台掃地機都沒有這個功能,我不清楚是不是目前大部份掃地機沒有該功能,這個功能挺重要,因為我發現好幾次,掃地機在那裏空跑,結果垃圾沒清理掉,基站周圍掉落很多垃圾,起初以為吸力下降,檢查後發現塵盒滿了,這個功能並不會很難,但真的實用。
最簡單的辦法,就是把機器熱頂部做成透明視覺化,使用者很容易獲取塵盒是否滿的狀態,及時清理:

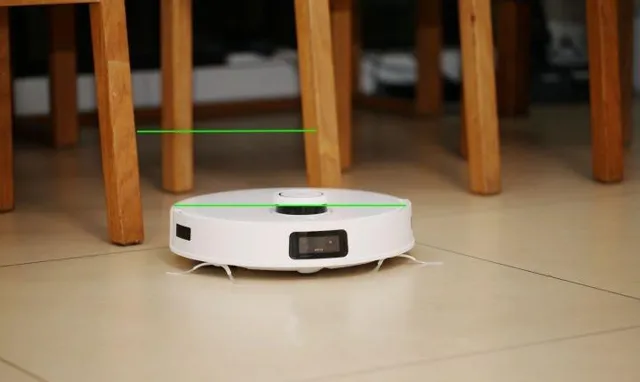
7、視覺演算法的不斷提升
不管是單目視覺、雙目視覺、結構光、深度視覺等SLAM技術,最後都是為了對周圍環境障礙物的影像辨識,目前行業領先的產品,辨識物體模型不超過百種,辨識率也不高,這對於復雜的多變的家庭地面場景,無法做到特別好的避障效能,使用者使用時總會出現這樣或者那樣的問題,我自己的一台PC主機就因為掃地機無法辨識地上的電源線,被掃地機硬拉後摔倒,硬碟損毀。
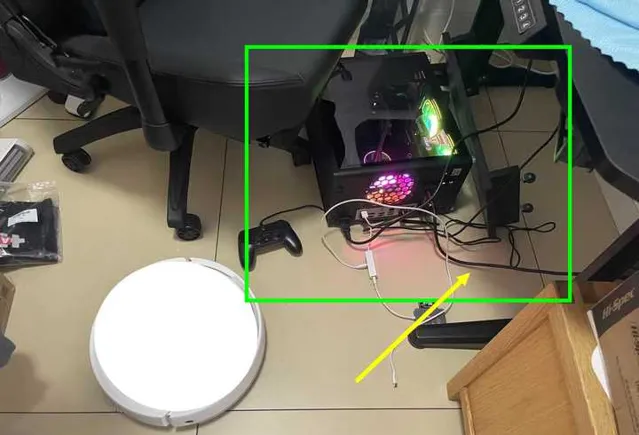
這種電源線的辨識有困難,對傳感器的技術類別和安裝位置都有較高的要求,但畢竟會帶來嚴重的後果,所以這塊的技術點急需升級改善。
不管采用哪些硬件傳感方案,希望掃地機的研發人員,能盡快將 低矮障礙物的辨識種類,提升到100種以上 ,覆蓋常見的物品,特別是細線類,並且 黑色和透明物體的辨識短板能完善 。
8、智能家居功能的拓展
掃地機有一個獨一無二的功能是目前其他智能家居產品中所不具備的,就是它帶有」行動功能「。
這會給掃地機的創新功能帶來一些想象力:
我認為,真正的智能家居產品,並不在於它的」遙控「功能,而是」感知「能力,透過不同類別的傳感器獲取室內環境的各種資訊,並做出相應的決策是最核心的要素。
因為只有感知了環境中的數據變化,才會有自動執行的下一步,這才是真」智能「。
所以,對於掃地機,我提幾個未來有可能的有關智能家居的」異想天開「的升級點:
9、掃地機基站形態的最佳化
現有的掃地機產品在形態上同質化嚴重,我比較擔心的是越來越大的機身和基站,越來越占據本來就不大的中國家庭,同時我也調研過一些具有前沿設計的掃地機品牌,比如松下的一個預言設計,基站的垂直收納吸附,節省了將近一半的占地空間:

本回答會陸續補充一些新的觀點,有興趣的可以追更。
其實,掃地機目前的技術創新,重點在於避障技術,本回答中提及較少,因為展開來內容會比較多,所以在其他回答中我專門針對這一塊寫過較為詳細的分享:
關於避障、導航定位所涉及到的傳感器,我認為目前已經很難再有新的升級,掃地機是一個弱化版的自動駕駛技術,LDS、TOF、結構光技術這些都是從工業和汽車領域轉移過來,而我們看到的工業、汽車領域目前也沒有太前沿的新的創新點,毫米波雷達也許是個新的突破口,TI和英飛淩都在推相應的芯片解決方案,但是還比較遙遠,成本很高,效能不成熟。
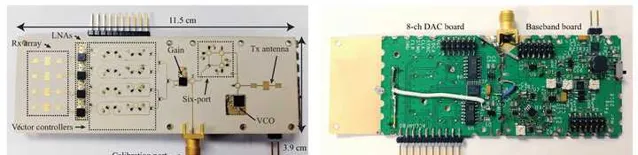
面陣TOF曾經短期出現在兩款掃地機上,但是由於較大的功耗、發熱、幾倍的成本問題,以及這種技術對於校準、標定的技術難度、演算法的技術難度,目前也沒有得到普及性的套用,所以技術難度類似的毫米波雷達,我覺得短期內也比較難。











