基于单目的深度估计只利用一个视点的视频序列和图像进行深度估计,具有价格低廉,获取信息内容丰富,传感器体积小等优势。与多目相比,单目的情形最贴近实际的应用需求,因为绝大多数应用场景只有一个视点,也是目前深度估计领域的研究热点。
目前,基于深度学习的单目深度估计方法已经有了很好的效果,包括在自动驾驶数据集KITTI上的性能也有很大突破,比如Monodeptp:

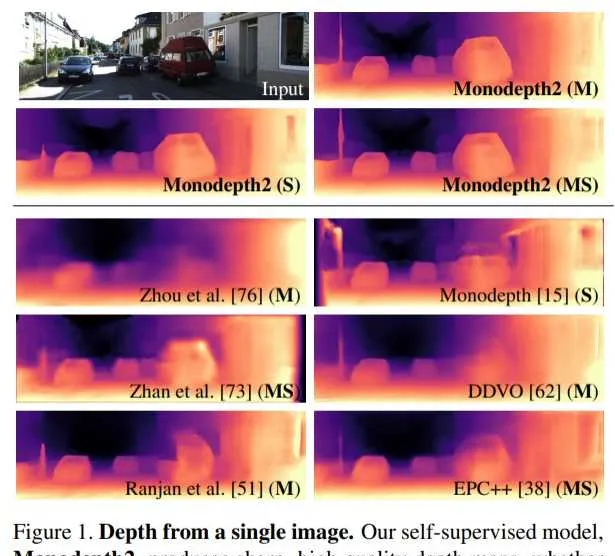
同时,无监督、自监督方法的性能也已经达到了一定的水平,无监督方法只需要利用视频就可以训练单目深度估计网络,这就使得数据集获取更加容易,不用依赖深度的真值。随时都可以利用新的场景数据训练模型,真正做到数据驱动的自动驾驶系统。
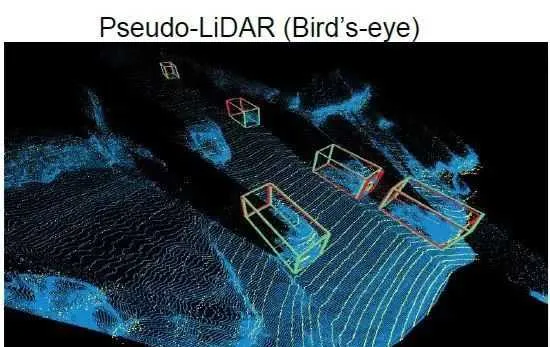
在具体应用上,单目深度估计可以用来生成稠密的伪激光点云,做单目3D的目标检测,会比直接用图像做单目3D检测的准确率更高。而且,深度图贴上颜色纹理信息还可以用来做三维重建,用来更好的感知障碍物和周围环境。

所以,我很看好单目深度估计在自动驾驶领域的应用前景。
最后,给大家推荐一个单目深度估计的课程:https://www. zhihu.com/question/4331 33870/answer/2185163289
课程亮点
1. 深入浅出,循序渐进,为你从理论到实战逐个攻破;
2. 讲师多年的工程经验倾情奉献,数据、源码开源帮助你更好地理解每处细节;
3. 理论结合实践,课时结束后布置练习项目,答疑群内,讲师和你在线交流遇到的难题;
4. 优质的学习圈子,你可以和来自清华大学、慕尼黑工业大学,上海交通大学、南京大学、华中科技大学、西北工业大学等高校学子一起讨论学习,你踩过的坑他们大概率也踩过;
5. 真正能面向工业落地的内容分享;
学习入口:
单目深度估计方法:算法梳理与代码实现










